一种基于虚拟场地模型的废钢自动分拣处理流水线及其工作方法与流程
本发明属于船舶废钢回收,尤其涉及一种基于虚拟场地模型的废钢自动分拣处理流水线及其工作方法。
背景技术:
1、在实现本发明的过程中,发明人发现现有技术至少存在以下问题:
2、废钢特别是高品质废钢是钢铁行业不可缺少的原料,对废钢进行分类回收、鉴别和加工,能够有效提高废钢的利用效率,促进废钢的升值和增值,是废钢经营管理工作的一项重要内容。
3、传统废钢的分拣主要由人工来完成,由于废钢的形状、大小不一,而整个分拣工作又较为精细,往往需要多人来操作完成。考虑到废钢的重量较大,人工分拣往往存在一定的安全隐患。
4、cn219092345u-一种废钢分拣装置,公开了一种废钢分拣装置,该实用新型使用时先将废钢经进料滑道送至水平的分拣平台,再打开振动器和电磁铁,较小件的废钢被电磁铁吸附,大件的废钢留于分拣平台上,然后降下电动千斤顶,使分拣平台向尾端倾斜,大件废钢滑出分拣平台并由其中一个卸料滑道滑出,也无法解决上述技术问题。
技术实现思路
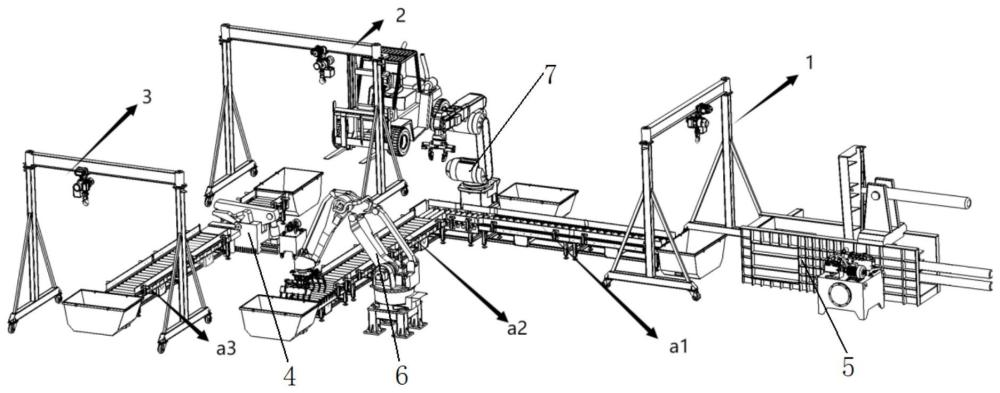
1、本发明所要解决的技术问题是提供一种基于虚拟场地模型的废钢自动分拣处理流水线及其工作方法,可以实现对轻废的抓取和打包、重废的剪切、非金属的分拣以及处理后废钢的运输。该流水线利用机械臂代替人工进行轻废的抓取和非金属的分拣,用废钢打包机进行轻废进行打包,用鳄鱼剪切机对重废进行剪切,这样就能有效提高机械化效率的同时可以减少人工参与保障施工的安全。
2、为了解决上述技术问题,本发明所采用的技术方案是:一种基于虚拟场地模型的废钢自动分拣处理流水线,具有:
3、重废处理线,能够输送并处理重型废钢;
4、轻废处理线,能够输送并处理轻型废钢。
5、所述轻废处理线具有:
6、第一滚筒传送机构,能输送轻型废钢;
7、分拣机械臂,设置在所述第一滚筒传送机构的中部附近,所述分拣机械臂能够分拣第一滚筒传送机构上的非金属物品;
8、废钢打包机,设置在所述第一滚筒传送机构的末端上,经过分拣的轻型废钢能够进入废钢打包机打包。
9、所述重废处理线具有:
10、第三滚筒传送机构,能输送重型废钢;
11、鳄鱼剪切机,所述第三滚筒传送机构的末端设有鳄鱼剪切机,所述鳄鱼剪切机能够处理第三滚筒传送机构输送的重型废钢。
12、所述轻废处理线还具有第二滚筒传送机构,所述第二滚筒传送机构的末端与第一滚筒传送机构的首端相接。
13、所述第二滚筒传送机构的首端设有抓钢机械臂,所述抓钢机械臂能够抓取轻型废钢原料箱中的工件放入第二滚筒传送机构上。
14、所述轻废处理线上还设有第一龙门吊机,所述第一龙门吊机设置在第一滚筒传送机构和废钢打包机之间,所述第一龙门吊机能够将轻废处理线上的轻型废钢送入废钢打包机。
15、所述第三滚筒传送机构的首端设有第三龙门吊机,所述第三龙门吊机能够将重型废钢原料箱中的工件放入第三滚筒传送机构上。
16、所述第三滚筒传送机构的末端设有第二龙门吊机,所述第二龙门吊机能够将鳄鱼剪切机处理后的重型废钢送入收集箱中;所述分拣机械臂的附近设有非金属物品收集箱。
17、上述的基于虚拟场地模型的废钢自动分拣处理流水线的工作方法,包括如下步骤:
18、s1:抓钢机械臂抓取轻废到第二滚筒传送机构;
19、s2:第二滚筒传送机构运输轻废;
20、s3:第二滚筒传送机构将轻废输送到第一滚筒传送机构将;
21、s4:分拣机械臂识别第二滚筒传送机构上的非金属,并抓取非金属;
22、s5:第一龙门吊机将轻废吊运到废钢打包机;
23、s6:废钢打包机打包轻废;
24、s7:叉车收集包块,运输入库;
25、s8:第三龙门吊机吊运重废到第三滚筒传送机构上;
26、s9:第三滚筒传送机构运输重废到鳄鱼剪切机;
27、s10:鳄鱼剪切机对重废进行剪切;
28、s11:第三滚筒传送机构运输剪切好的重废;
29、s12:第二龙门吊机吊运剪切好的重废到重废钢斗;
30、s13:叉车收集重废钢斗,运输入库。
31、所述抓钢机械臂包括基座电动机、中段电动机、前段电动机、执行端和视觉传感器,基座电动机安装在机械臂的基座上,中段电动机安装在机械臂的中段部分,前段电动机安装在机械臂前段和执行端之间,视觉传感器安装在执行端的前部;
32、抓钢机械臂在搬运废钢过程中容易因响应速度不足,导致机械臂运动不流畅,机械臂轨迹规划出现误差,进一步可能出现安全隐患。为了防止上述现象的发生抓钢机械臂控制满足如下表达式:
33、s=ctξ
34、其中:s为滑模控制响应;c为滑模控制设计参数矩阵;ξ为状态向量。
35、为了保证抓钢机械臂关节处在工作时保持相应的稳定性能,机械臂的关节控制所采用柔性关节的控制函数满足如下关系式:
36、
37、
38、其中:u为关节处的控制力矩;sign(s)为符号函数用于进行系统稳定性判别;s为滑模控制响应;l为系统稳定参数;b为主动扰动参数;d为被动扰动参数;w为动量矩阵;λ1,λ2为设计参数,λ1>0,λ2>0;
39、上述技术方案中的一个技术方案具有如下优点或有益效果,可以实现对轻废的抓取和打包、重废的剪切、非金属的分拣以及处理后废钢的运输。该流水线利用机械臂代替人工进行轻废的抓取和非金属的分拣,用废钢打包机进行轻废进行打包,用鳄鱼剪切机对重废进行剪切,这样就能有效提高机械化效率的同时可以减少人工参与保障施工的安全。
技术特征:
1.一种基于虚拟场地模型的废钢自动分拣处理流水线,其特征在于,具有:
2.如权利要求1所述的基于虚拟场地模型的废钢自动分拣处理流水线,其特征在于,所述轻废处理线具有:
3.如权利要求2所述的基于虚拟场地模型的废钢自动分拣处理流水线,其特征在于,所述重废处理线具有:
4.如权利要求3所述的基于虚拟场地模型的废钢自动分拣处理流水线,其特征在于,所述轻废处理线还具有第二滚筒传送机构,所述第二滚筒传送机构的末端与第一滚筒传送机构的首端相接。
5.如权利要求4所述的基于虚拟场地模型的废钢自动分拣处理流水线,其特征在于,所述第二滚筒传送机构的首端设有抓钢机械臂,所述抓钢机械臂能够抓取轻型废钢原料箱中的工件放入第二滚筒传送机构上。
6.如权利要求5所述的基于虚拟场地模型的废钢自动分拣处理流水线,其特征在于,所述轻废处理线上还设有第一龙门吊机,所述第一龙门吊机设置在第一滚筒传送机构和废钢打包机之间,所述第一龙门吊机能够将轻废处理线上的轻型废钢送入废钢打包机。
7.如权利要求6所述的基于虚拟场地模型的废钢自动分拣处理流水线,其特征在于,所述第三滚筒传送机构的首端设有第三龙门吊机,所述第三龙门吊机能够将重型废钢原料箱中的工件放入第三滚筒传送机构上。
8.如权利要求7所述的基于虚拟场地模型的废钢自动分拣处理流水线,其特征在于,所述第三滚筒传送机构的末端设有第二龙门吊机,所述第二龙门吊机能够将鳄鱼剪切机处理后的重型废钢送入收集箱中;所述分拣机械臂的附近设有非金属物品收集箱。
9.如权利要求1~8任一所述的基于虚拟场地模型的废钢自动分拣处理流水线的工作方法,其特征在于,包括如下步骤:
10.如权利要求9所述的基于虚拟场地模型的废钢自动分拣处理流水线的工作方法,其特征在于,所述抓钢机械臂包括基座电动机、中段电动机、前段电动机、执行端和视觉传感器,基座电动机安装在机械臂的基座上,中段电动机安装在机械臂的中段部分,前段电动机安装在机械臂前段和执行端之间,视觉传感器安装在执行端的前部;
技术总结
本发明公开了一种基于虚拟场地模型的废钢自动分拣处理流水线及其工作方法,具有:重废处理线,能够输送并处理重型废钢;轻废处理线,能够输送并处理轻型废钢。可以实现对轻废的抓取和打包、重废的剪切、非金属的分拣以及处理后废钢的运输。该流水线利用机械臂代替人工进行轻废的抓取和非金属的分拣,用废钢打包机进行轻废进行打包,用鳄鱼剪切机对重废进行剪切,这样就能有效提高机械化效率的同时可以减少人工参与保障施工的安全。
技术研发人员:王永清,衣正尧,曹千里,王思平,杨文生,滕飞
受保护的技术使用者:芜湖荻港荻利物资回收有限公司
技术研发日:
技术公布日:2024/3/21
- 还没有人留言评论。精彩留言会获得点赞!