综合养护车辆及其控制方法与装置、存储介质与流程
本发明涉及车辆控制,尤其涉及一种综合养护车辆及其控制方法与装置、存储介质。
背景技术:
1、随着人们的环保意识的持续提升,社会对环卫装备的需求持续增长。城市公交站台、道路指示牌、广告牌等高空设施等立面也在持续增长,这些立面设施长期使用下会附着大量的灰尘,影响了城市整体美观,而以前的路面养护车主要冲洗常规路面,对立面设施冲洗能力有限。即使有相应的立面设施清洗流程,也需要工作人员爬到升降台上,拿着水炮进行清洗,这非常影响工作效率,费时费力,并且还无法保障工作人员的作业安全性,容易造成安全事故。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明的第一个目的在于提出一种综合养护车辆的控制方法,能够提高综合养护车辆的工作效率,同时保障工作人员的作业安全。
2、本发明的第二个目的在于提出一种计算机可读存储介质。
3、本发明的第三个目的在于提出一种综合养护车辆的控制装置。
4、本发明的第四个目的在以提出一种综合养护车辆。
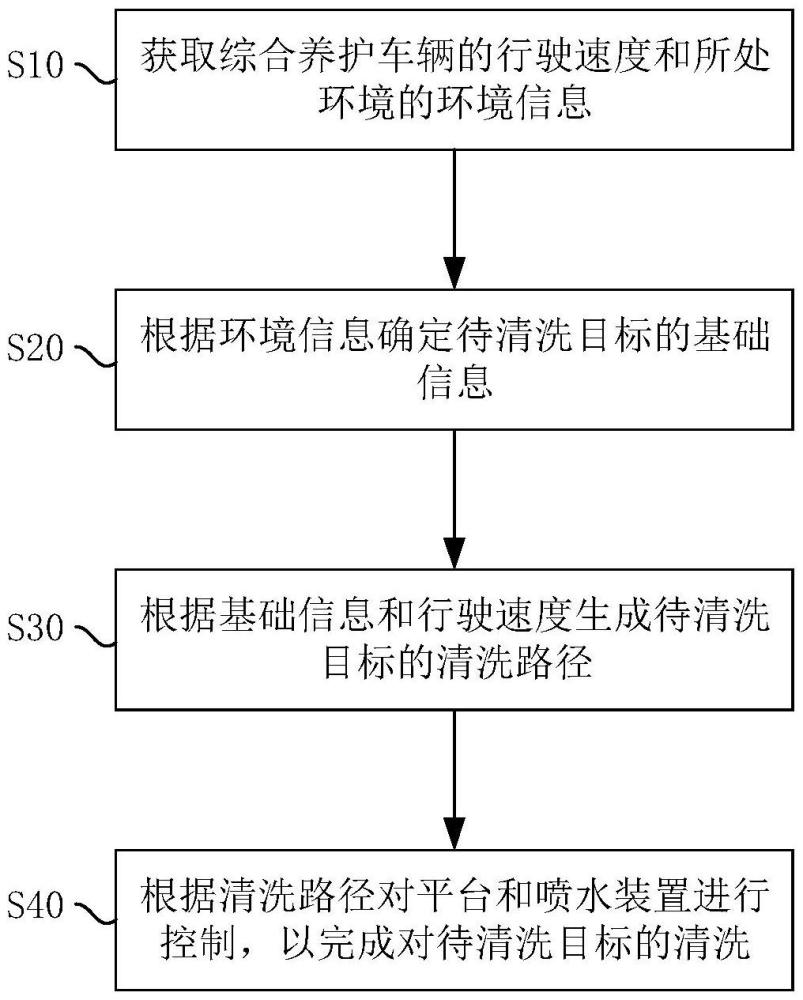
5、为达上述目的,本发明第一方面实施例提出了一种综合养护车辆的控制地方法,所述综合养护车辆包括可升降平台和喷水装置,所述喷水装置设置在所述平台上,以通过所述平台驱动所述喷水装置升降,所述控制方法包括:获取所述综合养护车辆的行驶速度和所处环境的环境信息;根据所述环境信息确定待清洗目标的基础信息;根据所述基础信息和所述行驶速度生成所述待清洗目标的清洗路径;根据所述清洗路径对所述平台和喷水装置进行控制,以完成对所述待清洗目标的清洗。
6、本发明实施例的综合养护车辆包括可升降平台和设置在可升降平台上的喷水装置,该综合养护车辆的控制方法首先获取综合养护车辆的行驶速度和其所处环境的环境信息,然后根据环境信息确定待清洗目标的基础信息,并通过基础信息和行驶速度能够生成该待清洗目标的清洗路径,接着根据该清洗路径对平台和喷水装置进行控制,进而完成对待清洗目标的自动清洗,能够提高综合养护车辆的工作效率,同时保障工作人员的作业安全。
7、在本发明的一些实施例中,所述综合养护车辆还包括激光雷达和视觉相机,所述喷水装置包括水炮喷嘴;和或所述基础信息包括:所述待清洗目标的尺寸信息和位置信息。
8、在本发明的一些实施例中,根据所述清洗路径对所述平台和喷水装置进行控制,包括:根据所述清洗路径对所述平台的升降高度和所述水炮喷嘴的喷水角度进行控制,其中,所述喷水角度包括第一方向角度和第二方向角度,所述第一方向与所述平台的升降方向相同,所述第二方向与所述平台的升降方向垂直。
9、在本发明的一些实施例中,所述待清洗目标包括多个待清洗区域,根据所述清洗路径对所述平台和喷水装置进行控制,包括:步骤一,控制所述平台和所述喷水装置处于预设位置;步骤二,根据所述清洗路径控制所述喷水装置的喷水角度沿所述第一方向旋转,并在所述喷水装置的喷水角度达到第一预设角度时,控制所述平台下降至第一预设高度;步骤三,控制所述喷水装置的喷水角度沿所述第二方向旋转第二方向预设角度,再控制所述喷水装置的喷水角度沿所述第一方向旋转,并在所述喷水装置的喷水角度达到第二预设角度时,控制所述平台上升至第二预设高度,以完成对一个所述待清洗区域的清洗;步骤四,继续控制所述喷水装置的喷水角度沿所述第二方向旋转所述第二方向预设角度,并重复上述步骤二和步骤三,以对剩余的待清洗区域完成清洗。
10、在本发明的一些实施例中,所述平台的预设位置为待清洗目标高度的三分之二处,所述喷水装置的预设位置为喷水装置中水炮喷嘴的喷水角度为喷向第一个待清洗区域的顶部所对应的角度。
11、在本发明的一些实施例中,所述控制方法还包括:通过所述激光雷达获取所述综合养护车辆所处环境的第一图像信息,以及通过所述视觉相机获取所述综合养护车辆所处环境的第二图像信息;对所述第一图像信息和所述第二图像信息进行融合处理,以确定所述综合养护车辆所处环境的环境信息;和/或所述控制方法还包括:在根据所述清洗路径对所述平台和喷水装置进行控制的过程中,持续获取所述综合养护车辆的实时行驶速度;根据所述实时行驶速度和所述基础信息对所述清洗路径进行跟踪和补偿。
12、在本发明的一些实施例中,所述控制方法还包括:获取所述综合养护车辆所处环境的当前环境信息;在根据所述当前环境信息确定距离所述待清洗目标的预设范围内存在干扰目标时,则对所述喷水装置的喷水流量进行调节。
13、为达上述目的,本发明第二方面实施例提出了一种计算机可读存储介质,其上存储有综合养护车辆的控制程序,所述控制程序被处理器执行时实现上述实施例中任一项所述的综合养护车辆的控制方法。
14、本发明实施例的计算机可读存储介质通过处理器执行存储在其上的综合养护车辆的控制程序,能够提高综合养护车辆的工作效率,同时保障工作人员的作业安全。
15、为达上述目的,本发明第三方面实施例提出了一种综合养护车辆的控制装置,所述综合养护车辆包括可升降平台和喷水装置,所述喷水装置设置在所述平台上,以通过所述平台驱动所述喷水装置升降,所述控制装置包括:获取模块,用于获取所述综合养护车辆的行驶速度和所处环境的环境信息;确定模块,用于根据所述环境信息确定待清洗目标的基础信息;生成模块,用于根据所述基础信息和所述行驶速度生成所述待清洗目标的清洗路径;控制模块,用于根据所述清洗路径对所述平台和喷水装置进行控制,以完成对所述待清洗目标的清洗。
16、本发明实施例的综合养护车辆包括可升降平台和设置在可升降平台上的喷水装置,该综合养护车辆的控制装置首先通过获取模块获取综合养护车辆的行驶速度和其所处环境的环境信息,然后确定模块可以根据环境信息确定待清洗目标的基础信息,并利用生成模块以通过基础信息和行驶速度能够生成该待清洗目标的清洗路径,接着控制模块可以根据该清洗路径对平台和喷水装置进行控制,进而完成对待清洗目标的自动清洗,能够提高综合养护车辆的工作效率,同时保障工作人员的作业安全。
17、为达上述目的,本发明第四方面实施例提出了一种综合养护车辆,该综合养护车辆包括上述实施例中综合养护车辆的控制装置。
18、本发明实施例的综合养护车辆通过上述实施例中综合养护车辆的控制装置,能够提高综合养护车辆的工作效率,同时保障工作人员的作业安全。
19、本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种综合养护车辆的控制方法,其特征在于,所述综合养护车辆包括可升降平台和喷水装置,所述喷水装置设置在所述平台上,以通过所述平台驱动所述喷水装置升降,所述控制方法包括:
2.根据权利要求1所述的控制方法,其特征在于,所述综合养护车辆还包括激光雷达和视觉相机,所述喷水装置包括水炮喷嘴;
3.根据权利要求2所述的控制方法,其特征在于,根据所述清洗路径对所述平台和喷水装置进行控制,包括:
4.根据权利要求3所述的控制方法,其特征在于,所述待清洗目标包括多个待清洗区域,根据所述清洗路径对所述平台和喷水装置进行控制,包括:
5.根据权利要求4所述的控制方法,其特征在于,所述平台的预设位置为所述待清洗目标高度的三分之二处,所述喷水装置的预设位置为所述喷水装置中水炮喷嘴的喷水角度为喷向第一个待清洗区域的顶部所对应的角度。
6.根据权利要求2所述的控制方法,其特征在于,所述控制方法还包括:
7.根据权利要求6所述的控制方法,其特征在于,所述控制方法还包括:
8.一种计算机可读存储介质,其特征在于,其上存储有综合养护车辆的控制程序,所述控制程序被处理器执行时实现上述权利要求1-7中任一项所述的综合养护车辆的控制方法。
9.一种综合养护车辆的控制装置,其特征在于,所述综合养护车辆包括可升降平台和喷水装置,所述喷水装置设置在所述平台上,以通过所述平台驱动所述喷水装置升降,所述控制装置包括:
10.一种综合养护车辆,其特征在于,包括权利要求9所述的综合养护车辆的控制装置。
技术总结
本发明涉及车辆控制技术领域,具体公开了一种综合养护车辆及其控制方法与装置、存储介质,其中,综合养护车辆包括可升降平台和喷水装置,喷水装置设置在平台上,以通过平台驱动喷水装置升降,控制方法包括:获取综合养护车辆的行驶速度和所处环境的环境信息;根据环境信息确定待清洗目标的基础信息;根据基础信息和行驶速度生成待清洗目标的清洗路径;根据清洗路径对平台和喷水装置进行控制,以完成对待清洗目标的清洗,进而能够提高综合养护车辆的工作效率,同时保障工作人员的作业安全。
技术研发人员:张明耀,陈华,王馨,陈超辉,蒋志达,胡国球,龙志伟
受保护的技术使用者:长沙中联重科环境产业有限公司
技术研发日:
技术公布日:2024/9/26
- 还没有人留言评论。精彩留言会获得点赞!