一种荒料与运输车辆全方位高效智能化清洗系统
本发明涉及矿山荒料码放或装运前的清洗领域,具体涉及一种荒料与运输车辆全方位高效智能化清洗系统。
背景技术:
1、荒料,是指矿山的石料经加工,具有一定规格、可满足板材加工或其它用途的块石。荒料既是石材矿山的产品,又是板材加工厂的原料。
2、基于环保的需求,通常需要对荒料进行清洗;清洗时,要确保荒料的六个面都被清洗干净,目前的清洗方法基本上是人工清洗,清洗方法包括使用铁铲、刷子和水管,如果矿山有水管,应尽量使用水管进行清洗,否则只能使用水壶来完成清洗工作。此外,为了提高工作效率和安全性,一些先进的切割装置还配备了清洗装置。例如,一种带有清洗装置的花岗岩荒料切割装置(参见专利cn216682800u),其清洗喷头设置在切割轮的两侧,可以对切割轮进行及时的粉尘清洁处理,有效抑制粉尘的飞扬,起到降尘的作用,从而方便切割装置的加工使用。但是无论是在切割装置中增加清洗装置还是切割完成后进行清洗,整体效率都比较低。
3、此外,在运输方面,石材荒料的运输也有严格的规定,要求保持车容整洁、清洗干净,严禁石材荒料运输车带碴带灰带泥上路运输,但是目前没有完整的车辆进厂清洗、监控系统。
技术实现思路
1、为了解决现有技术中存在的技术问题,本发明的目的是提供一种荒料与运输车辆全方位高效智能化清洗系统。
2、本发明采用的技术方案如下:
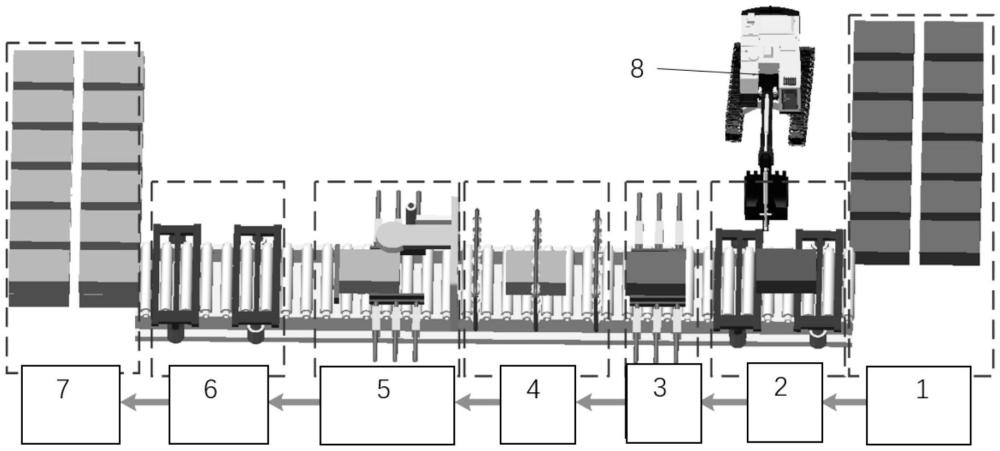
3、一种荒料与运输车辆全方位高效智能化清洗系统,包括待清洗区、上料区、对中区、清洗区、编码区、卸料区、存储区和输送机;所述的输送机从待清洗区一直延伸至存储区,实现荒料的输送;
4、在上料区设置有上料台、叉装车、第一升降机,所述的叉装车将待清洗的荒料放置在上料台上,上料台在第一升降机的驱动下,向下运动,将荒料落在输送机上,输送机将荒料向前输送至对中区;
5、在对中区设置有第一对中定位装置,第一对中定位装置对荒料进行对中定位;
6、在清洗区设置有六面清洗装置,所述的六面清洗装置对荒料进行六面清洗;
7、在编码区设置有第二对中定位装置、限位装置、外观扫描装置和编码装置,所述的第二对中定位装置对荒料进行对中后,通过限位装置进行限位,外观扫描装置对荒料外观进行扫描,编码装置对荒料进行编码。
8、在卸料区设置有卸料台、第二升降机和堆垛机,所述的卸料台由第二升降机驱动其升降,卸料台用于放置荒料,当荒料在输送机的输送下输送至卸料区时,卸料台在第二升降机的驱动下升起,此时堆垛机根据编码对荒料进行分类运输至存储区。
9、作为进一步的技术方案,所述的外观扫描装置基于ai技术进行计数、三维形貌测量、体积计数、品级评估。
10、作为进一步的技术方案,所述的第一对中定位装置设置在输送机的两侧,实现对荒料的对中。
11、作为进一步的技术方案,所述的第二对中定位装置设置在输送机的两侧,实现对荒料的对中。
12、作为进一步的技术方案,所述的限位装置为限位板,其设置在荒料的前侧,所述的限位板可以升降。
13、作为进一步的技术方案,所述的外观扫描装置通过支架设置在编码区上方,所述的外观扫描装置采用二维激光振镜扫描仪,二维激光振镜扫描仪的测量系统扫描不同大小荒料特征,获取其三维激光点云数据,对荒料类型进行识别,并对荒料点云中心切片,分别获得荒料点云三个坐标轴方向上的切片;最后对点云切片去噪、增强、分割,提取点云切片的边界信息;最后根据切片轮廓的特征几何参数,结合荒料三视图理论,完成对石料类型的判断识别。
14、作为进一步的技术方案,所述的六面清洗装置包括沿着输送机输送方向设置的多个矩形框架,在矩形框架的上下左右四根梁柱上均设置有若干清洗喷头,且喷头带有一定的倾斜角度,实现对荒料前后面的清洗。
15、作为进一步的技术方案,所述的编码装置向清洗后的荒料上喷射二维码;
16、作为进一步的技术方案,在荒料六面高效智能化清洗系统的一侧或者两侧还可设置一条车辆清洗线,其包括依次设置的登记区、车辆遮盖异常检测区、清洗区、称重区、装车区、车辆遮盖识别区;在车辆清洗线的装车区与荒料六面高效智能化清洗系统的存储区之间设置有荒料装车叉车。
17、作为进一步的技术方案,所述的清洗区包括沿着车辆前进方向设置的多个矩形框架,在矩形框架的上下左右四根梁柱上均设置有若干清洗喷头,且喷头带有一定的倾斜角度,实现对车辆前后面的清洗。
18、作为进一步的技术方案,在清洗区的末端还设置一段上坡面,在上坡面的上方设置有图像采集装置,所述上坡面为三自由度重载动平台,基于图像采集装置以及视觉识别控制算法,获取车体污水存放位置信息及车体姿态信息,然后,三自由度重载动平台根据采集的信号主动调整车体姿态,实现全方位的车体废水彻底排放的目的。
19、本发明的有益效果如下:
20、本发明提出的荒料六面高效智能化清洗系统,包括待清洗区、上料区、对中区、清洗区、编码区、卸料区、存储区和输送机;所述的输送机从待清洗区一直延伸至存储区,实现荒料的输送;可以实现荒料的全智能化清洗,现场无需人工参与,且还可以同步对矿山车辆进入数据进行动态监管,对车辆清洗异常、车辆遮盖异常、车辆过重等进行监测,完成对车身洁净度等级、行车轨迹等问题的全程掌握、实施管控,对整治扬尘问题起到实际效果。
技术特征:
1.一种荒料与运输车辆全方位高效智能化清洗系统,其特征在于,包括待清洗区、上料区、对中区、清洗区、编码区、卸料区、存储区和输送机;所述的输送机从待清洗区一直延伸至存储区,实现荒料的输送;
2.如权利要求1所述的荒料与运输车辆全方位高效智能化清洗系统,其特征在于,所述的外观扫描装置基于ai技术进行计数、三维形貌测量、体积计数、品级评估。
3.如权利要求1所述的荒料与运输车辆全方位高效智能化清洗系统,其特征在于,所述的第一对中定位装置设置在输送机的两侧,实现对荒料的对中;所述的第二对中定位装置设置在输送机的两侧,实现对荒料的对中。
4.如权利要求1所述的荒料与运输车辆全方位高效智能化清洗系统,其特征在于,所述的编码装置向清洗后的荒料上喷射二维码。
5.如权利要求1所述的荒料与运输车辆全方位高效智能化清洗系统,其特征在于,所述的限位装置为限位板,其设置在荒料的前侧,所述的限位板可以升降。
6.如权利要求1所述的荒料与运输车辆全方位高效智能化清洗系统,其特征在于,所述的外观扫描装置通过支架设置在编码区上方;所述的外观扫描装置采用二维激光振镜扫描仪,二维激光振镜扫描仪的测量系统扫描不同大小荒料特征,获取其三维激光点云数据,对荒料类型进行识别,并对荒料点云中心切片,分别获得荒料点云三个坐标轴方向上的切片;最后对点云切片去噪、增强、分割,提取点云切片的边界信息;最后根据切片轮廓的特征几何参数,结合荒料三视图理论,完成对石料类型的判断识别。
7.如权利要求1所述的荒料与运输车辆全方位高效智能化清洗系统,其特征在于,所述的六面清洗装置包括沿着输送机输送方向设置的多个矩形框架,在矩形框架的上下左右四根梁柱上均设置有若干清洗喷头,且喷头带有一定的倾斜角度,实现对荒料前后面的清洗。
8.如权利要求1所述的荒料与运输车辆全方位高效智能化清洗系统,其特征在于,在荒料六面高效智能化清洗系统的一侧或者两侧还可设置一条车辆清洗线,其包括依次设置的登记区、车辆遮盖异常检测区、清洗区、称重区、装车区、车辆遮盖识别区;在车辆清洗线的装车区与荒料六面高效智能化清洗系统的存储区之间设置有荒料装车叉车。
9.如权利要求1所述的荒料与运输车辆全方位高效智能化清洗系统,其特征在于,所述的清洗区包括沿着车辆前进方向设置的多个矩形框架,在矩形框架的上下左右四根梁柱上均设置有若干清洗喷头,且喷头带有一定的倾斜角度,实现对车辆前后面的清洗。
10.如权利要求1所述的荒料与运输车辆全方位高效智能化清洗系统,其特征在于,在清洗区的末端还设置一段上坡面,在上坡面的上方设置有图像采集装置,所述上坡面为三自由度重载动平台,基于图像采集装置以及视觉识别控制算法,获取车体污水存放位置信息及车体姿态信息,然后,三自由度重载动平台根据采集的信号主动调整车体姿态,实现全方位的车体废水彻底排放的目的。
技术总结
本发明公开了一种荒料与运输车辆全方位高效智能化清洗系统,荒料清洗包括待清洗区、上料区、对中区、清洗区、编码区、卸料区、存储区和输送机;所述的输送机从待清洗区一直延伸至存储区,实现荒料的输送;在清洗区设置有六面清洗装置,所述的六面清洗装置对荒料进行六面清洗;在编码区设置有对中定位装置、限位装置、外观扫描装置和编码装置,外观扫描装置对荒料外观进行扫描,编码装置对荒料进行编码。在荒料六面高效智能化清洗系统的一侧或者两侧还可设置一条车辆清洗线。
技术研发人员:杨锋苓,张恒,张进生
受保护的技术使用者:山东大学日照研究院
技术研发日:
技术公布日:2024/12/2
- 还没有人留言评论。精彩留言会获得点赞!