一种适用于小管径的电缆管道疏通机器人的制作方法
本发明属于电缆管道机器人领域,具体涉及一种适用于小管径的电缆管道疏通机器人。
背景技术:
1、现有的电缆管道疏通机器人的行走系统一般采用的是轮式机构带动机器人在管道内部行走的方式,且机器人的前端清理机构一般不能清理固定障碍物,但是直径相对较小(175~225mm)的电缆管道,轮式行走系统的动力往往不足,不能满足在直径小的电缆管道内长距离运行。
2、中国专利申请:cn110296294a公开了一种组合式管道清洗喷涂机器人,cn110541999a一款中空轴气动管道机器人,cn112413285a一种管道清障机器人,以及中国专利:cn110508572b公开了一种多支撑轮式蠕动管道清理机器人。
3、虽然上述技术解决了行走系统动力不足的问题,但是上述技术仍然存在如下问题:
4、(1)上述机器人结构复杂,结构体积大,制造成本高;
5、(2)上述机器人在管道内行走时,容易损伤管道,导致管道使用寿命短;
6、(3)上述对于障碍的清理不到位,清理效果差。
7、有鉴于此,特提出本发明。
技术实现思路
1、为了解决现有技术中存在的技术问题,本发明提供了一种适用于小管径的电缆管道疏通机器人,本发明的机器人通过气囊与管道接触,避免了管道损伤,具有提高管道使用寿命的优点;同时本发明的机器人结构简单,体积小,制造成本低。
2、本发明包括如下技术方案:
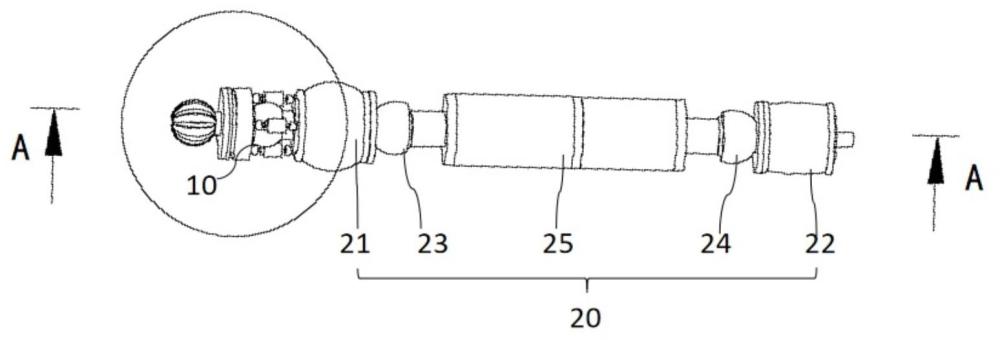
3、本发明提供了一种适用于小管径的电缆管道疏通机器人,包括连接的工作系统和行走系统,所述行走系统包括第一气囊、第二气囊、第一球形关节、第二球形关节和气动伸缩机构,所述第一气囊通过所述第一球形关节连接所述气动伸缩机构的一端,所述气动伸缩机构的另一端通过所述第二球形关节连接所述第二气囊;
4、所述气动伸缩机构包括第一气动结构、第二气动结构、第一伸缩杆和第二伸缩杆;所述第一伸缩杆一端与所述第一球形关节连接,另一端设置有第一凸台,所述第一凸台滑动设置在所述第一气动结构的第一内腔使第一内腔形成第一气室和第二气室;所述第二伸缩杆一端与所述第二球形关节连接,另一端设置有第二凸台,所述第二凸台滑动设置在所述第二气动结构的第二内腔使第二内腔形成第三气室和第四气室;所述第一气动结构与所述第二气动结构连接。
5、进一步地,所述气动伸缩机构还包括连接结构,所述连接结构设置有第三内腔,所述第三内腔的两端分别连接所述第一气动结构和第二气动结构。
6、进一步地,所述第一气囊和第二气囊均为环形气囊;用于给所述第一气囊、第二气囊第一气动结构和第二气动结构连接的气路设置在所述第二气囊的内环腔、第二球形关节、连接结构、第一球形关节和第一气囊的内环腔内。
7、进一步地,所述工作系统为铣刀机构,所述铣刀机构通过第三球形关节连接所述第一气囊。
8、进一步地,所述铣刀机构与所述第一气囊之间设置有若干个伺服电缸。
9、进一步地,所述伺服电缸设置三个,三个所述伺服电缸均匀环绕设置在所述第三球形关节外侧。
10、进一步地,所述工作系统为切割机构,所述切割机构通过第三球形关节连接所述第一气囊,所述切割机构用于切割小管径电缆管道内的电缆。
11、进一步地,所述切割机构包括主旋转电机、磁力推杆、端面砂轮、第一圆台砂轮、第二圆台砂轮、第一自旋转电机和第二自旋转电机,所述第三球形关节连接所述主旋转电机,所述主旋转电机的输出轴连接所述磁力推杆,所述磁力推杆远离所述主旋转电机的一端连接所述端面砂轮,所述磁力推杆的相对设置的两个推杆分别连接所述第一自旋转电机和第二自旋转电机,所述第一自旋转电机连接所述第一圆台砂轮,所述第二自旋转电机连接所述第二圆台砂轮。
12、进一步地,所述工作系统为修补机构,所述修补机构用于修补电缆的外护套。
13、采用上述技术方案,本发明包括如下优点:
14、1、本发明的机器人通过气囊与管道接触,避免了管道损伤,具有提高管道使用寿命的优点;同时本发明的机器人结构简单,体积小,制造成本低。
15、2、本发明通过在铣刀机构和第一气囊之间设置伺服电缸,使本发明的机器人在电缆管道内清理硬物等障碍时能够根据硬物的位置调整铣刀机构的方向,具有更好的清理效果。
16、本发明的其他特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在说明书以及附图中所指出的结构来实现和获得。
技术特征:
1.一种适用于小管径的电缆管道疏通机器人,包括连接的工作系统(10)和行走系统(20),其特征在于,所述行走系统(20)包括第一气囊(21)、第二气囊(22)、第一球形关节(23)、第二球形关节(24)和气动伸缩机构(25),所述第一气囊(21)通过所述第一球形关节(23)连接所述气动伸缩机构(25)的一端,所述气动伸缩机构(25)的另一端通过所述第二球形关节(24)连接所述第二气囊(22);
2.根据权利要求1所述的一种适用于小管径的电缆管道疏通机器人,其特征在于,所述气动伸缩机构(25)还包括连接结构(255),所述连接结构(255)设置有第三内腔(2551),所述第三内腔(2551)的内设置所述第一气动结构(251)和第二气动结构(252)。
3.根据权利要求2所述的一种适用于小管径的电缆管道疏通机器人,其特征在于,所述第一气囊(21)和第二气囊(22)均为环形气囊;用于给所述第一气囊(21)、第二气囊(22)第一气动结构(251)和第二气动结构(252)连接的气路设置在所述第二气囊(22)的内环腔、第二球形关节(24)、连接结构(255)的第三内腔(2551)、第一球形关节(23)和第一气囊(21)的内环腔内。
4.根据权利要求1所述的一种适用于小管径的电缆管道疏通机器人,其特征在于,所述工作系统(10)为铣刀机构(11),所述铣刀机构(11)通过第三球形关节(30)连接所述第一气囊(21)。
5.根据权利要求4所述的一种适用于小管径的电缆管道疏通机器人,其特征在于,所述铣刀机构(11)与所述第一气囊(21)之间设置有若干个伺服电缸(40)。
6.根据权利要求5所述的一种适用于小管径的电缆管道疏通机器人,其特征在于,所述伺服电缸(40)设置三个,三个所述伺服电缸(40)均匀环绕设置在所述第三球形关节(30)外侧。
7.根据权利要求1所述的一种适用于小管径的电缆管道疏通机器人,其特征在于,所述工作系统(10)为切割机构,所述切割机构通过第三球形关节连接所述第一气囊,所述切割机构用于切割小管径电缆管道内的电缆。
8.根据权利要求7所述的一种适用于小管径的电缆管道疏通机器人,其特征在于,所述切割机构包括主旋转电机、磁力推杆、端面砂轮、第一圆台砂轮、第二圆台砂轮、第一自旋转电机和第二自旋转电机,所述第三球形关节连接所述主旋转电机,所述主旋转电机的输出轴连接所述磁力推杆,所述磁力推杆远离所述主旋转电机的一端连接所述端面砂轮,所述磁力推杆的相对设置的两个推杆分别连接所述第一自旋转电机和第二自旋转电机,所述第一自旋转电机连接所述第一圆台砂轮,所述第二自旋转电机连接所述第二圆台砂轮。
9.根据权利要求1所述的一种适用于小管径的电缆管道疏通机器人,其特征在于,所述工作系统(10)为修补机构,所述修补机构用于修补电缆的外护套。
技术总结
本发明属于电缆管道机器人领域,具体涉及一种适用于小管径的电缆管道疏通机器人,包括连接的工作系统和行走系统,所述行走系统包括第一气囊、第二气囊、第一球形关节、第二球形关节和气动伸缩机构,所述第一气囊通过所述第一球形关节连接所述气动伸缩机构的一端,所述气动伸缩机构的另一端通过所述第二球形关节连接所述第二气囊。本发明的机器人通过气囊与管道接触,避免了管道损伤,具有提高管道使用寿命的优点;同时本发明的机器人结构简单,体积小,制造成本低。
技术研发人员:郝立今,邢宏超,魏占朋,李申童,张轩瑞,武旭光,张苗苗
受保护的技术使用者:国网天津市电力公司电力科学研究院
技术研发日:
技术公布日:2024/12/30
- 还没有人留言评论。精彩留言会获得点赞!