一种超声波传感器机构和光伏清洁机器人的制作方法
本技术涉及光伏清洁机器人的,尤其涉及一种超声波传感器机构和光伏清洁机器人。
背景技术:
1、随着科技的发展,光伏板逐步应用于电力领域,光伏板的主要作用是将太阳能转化为电能,此时,光伏板暴露于外界环境,光伏清洁机器人用于清洁光伏板的表面,在光伏清洁机器人中,超声波传感器机构作为光伏清洁机器人的一部分。
2、在现有技术中,现有的超声波传感器机构包括机器人主体、履带模块和超声波传感器,履带模块和超声波传感器均连接于机器人主体,但是,超声波传感器与履带模块不在同一侧,超声波传感器内置于机器人主体,履带模块处于机器人主体外侧,该超声波传感器无法检测履带模块的前侧环境,导致光伏清洁机器人的避障效果较差。
技术实现思路
1、本实用新型的目的在于提供一种超声波传感器机构和光伏清洁机器人,超声波传感器组件与履带模块处于壳体的同一侧,并处于履带模块的前方,基于超声波传感器组件能够测履带模块的前方的环境,以便于超声波传感器组件在光伏清洁机器人相对于光伏板行走时检测履带模块的前方的环境,从而便于在超声波传感器的感应下触发履带组件的调整,进而保证了光伏清洁机器人的行走效果,也能够及时对履带组件的前方环境进行探测,保证了履带组件的避障效果。
2、为实现上述目的,本实用新型提供如下技术方案:
3、一种超声波传感器机构,应用于光伏清洁机器人;所述超声波传感器机构包括:
4、机器人主体,包括壳体;
5、履带模块,设置于所述壳体的一侧,并用于在光伏板的表面行走;
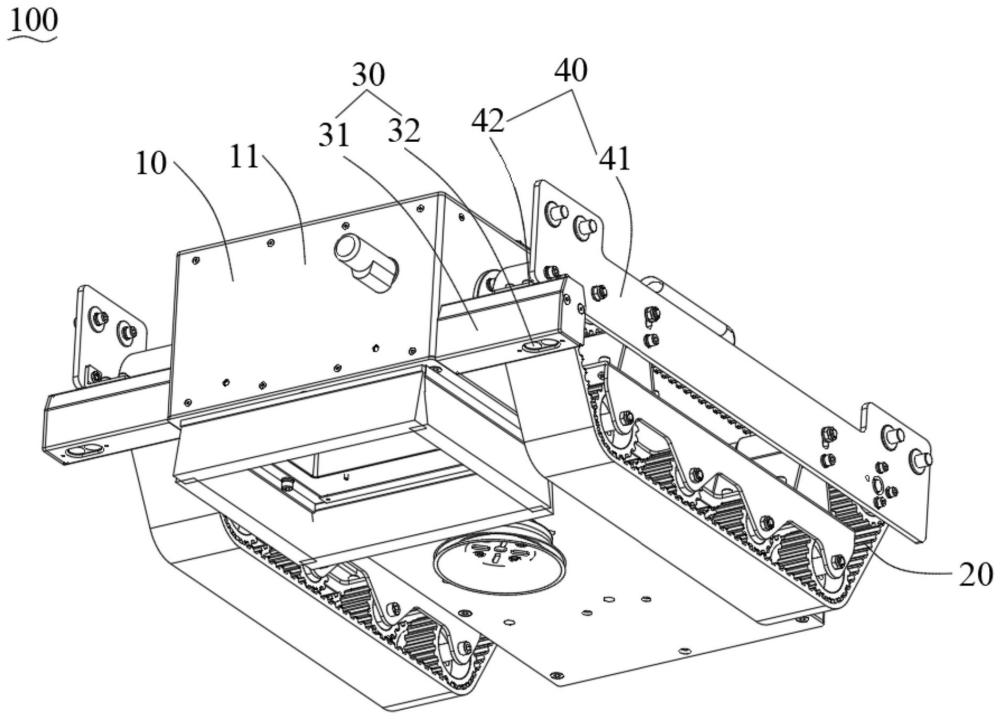
6、超声波传感器组件,与所述履带模块处于所述壳体的同一侧,并处于所述履带模块的前方;所述超声波传感器组件包括安装座、超声波传感器;所述安装座设置于所述壳体的一侧;所述超声波传感器连接于所述安装座;所述超声波传感器的探头端所输出的超声波穿设所述安装座。
7、可选的,所述超声波传感器的探头端与履带模块的下侧面之间存在高度差;
8、所述超声波传感器的探头端所探测的范围涵盖高度差。
9、可选的,所述安装座设置于所述壳体的左侧或者右侧,并可拆卸地连接于所述壳体。
10、可选的,所述超声波传感器机构还包括加固支架,所述加固支架处于所述安装座和所述壳体之间,所述加固支架的两端分别连接于所述安装座和所述壳体,并加固所述超声波传感器组件;所述加固支架与所述壳体之间的连接处与所述安装座与所述壳体之间的连接处处于不同位置。
11、可选的,所述加固支架设置于履带模块的一侧;
12、所述安装座呈长条状,所述安装座的一侧壁连接于所述壳体的侧壁,所述安装座的上侧壁连接于所述加固支架的一端,所述加固支架的另一端连接于所述壳体的侧壁。
13、可选的,所述加固支架包括支架主体和连接件,所述连接件连接于所述支架主体和所述安装座,所述支架主体经所述履带模块连接于所述壳体;所述连接件为金属件,所述支架主体为碳板件。
14、可选的,所述安装座设有第一容纳腔和第一过孔,所述第一过孔沿上下方向连通所述第一容纳腔;所述第一过孔用于供所述超声波传感器穿设;
15、所述第一容纳腔用于容纳所述超声波传感器;所述超声波传感器的探头端相对于所述第一过孔布置,并暴露于所述第一过孔。
16、可选的,所述机器人主体还包括电路板和导电件,所述电路板容纳于所述壳体内;
17、所述导电件处于所述超声波传感器组件和所述机器人主体之间,所述导电件的一端电连接于所述电路板,另一端电连接于所述超声波传感器;所述导电件穿设所述壳体和所述安装座,并在穿设所述壳体时与所述壳体密封连接。
18、可选的,所述壳体设有第二容纳腔和第二过孔,所述第二容纳腔用于容纳所述电路板;
19、所述第二过孔开设于所述壳体的侧壁,并连通所述第二容纳腔;所述第二过孔用于供所述导电件穿设;
20、所述超声波传感器机构还包括密封件,所述密封件连接于所述第二过孔,并密封地封堵所述第二过孔;所述导电件穿设所述密封件,并与所述密封件密封连接。
21、一种光伏清洁机器人,包括所述的超声波传感器机构。
22、与现有技术相比,本实用新型的有益效果是:
23、本实用新型提供一种超声波传感器机构和光伏清洁机器人,机器人主体包括壳体;履带模块设置于壳体的一侧,并用于在光伏板的表面行走;超声波传感器组件与履带模块处于壳体的同一侧,并处于履带模块的前方;超声波传感器组件包括安装座、超声波传感器;安装座设置于壳体的一侧;超声波传感器连接于安装座;超声波传感器的探头端所输出的超声波穿设安装座,此时,超声波传感器组件与履带模块处于壳体的同一侧,并处于履带模块的前方,基于超声波传感器组件能够测履带模块的前方的环境,以便于超声波传感器组件在光伏清洁机器人相对于光伏板行走时检测履带模块的前方的环境,从而便于在超声波传感器的感应下触发履带组件的调整,进而保证了光伏清洁机器人的行走效果,也能够及时对履带组件的前方环境进行探测,保证了履带组件的避障效果。
技术特征:
1.一种超声波传感器机构,其特征在于,应用于光伏清洁机器人;所述超声波传感器机构包括:
2.根据权利要求1所述的超声波传感器机构,其特征在于,所述超声波传感器的探头端与履带模块的下侧面之间存在高度差;
3.根据权利要求2所述的超声波传感器机构,其特征在于,所述安装座设置于所述壳体的左侧或者右侧,并可拆卸地连接于所述壳体。
4.根据权利要求3所述的超声波传感器机构,其特征在于,所述超声波传感器机构还包括加固支架,所述加固支架处于所述安装座和所述壳体之间,所述加固支架的两端分别连接于所述安装座和所述壳体,并加固所述超声波传感器组件;所述加固支架与所述壳体之间的连接处与所述安装座与所述壳体之间的连接处处于不同位置。
5.根据权利要求4所述的超声波传感器机构,其特征在于,所述加固支架设置于履带模块的一侧;
6.根据权利要求4所述的超声波传感器机构,其特征在于,所述加固支架包括支架主体和连接件,所述连接件连接于所述支架主体和所述安装座,所述支架主体经所述履带模块连接于所述壳体;所述连接件为金属件,所述支架主体为碳板件。
7.根据权利要求1所述的超声波传感器机构,其特征在于,所述安装座设有第一容纳腔和第一过孔,所述第一过孔沿上下方向连通所述第一容纳腔;所述第一过孔用于供所述超声波传感器穿设;
8.根据权利要求1所述的超声波传感器机构,其特征在于,所述机器人主体还包括电路板和导电件,所述电路板容纳于所述壳体内;
9.根据权利要求8所述的超声波传感器机构,其特征在于,所述壳体设有第二容纳腔和第二过孔,所述第二容纳腔用于容纳所述电路板;
10.一种光伏清洁机器人,其特征在于,包括如权利要求1至9中任一所述的超声波传感器机构。
技术总结
本申请提供一种超声波传感器机构和光伏清洁机器人,超声波传感器机构包括机器人主体、履带模块和超声波传感器组件;履带模块设置于壳体的一侧,并用于在光伏板的表面行走;超声波传感器组件与履带模块处于壳体的同一侧,并处于履带模块的前方;超声波传感器组件包括安装座、超声波传感器;安装座设置于壳体的一侧;超声波传感器连接于安装座;超声波传感器的探头端所输出的超声波穿设安装座,此时,超声波传感器组件与履带模块处于壳体的同一侧,并处于履带模块的前方,基于超声波传感器组件能够测履带模块的前方的环境,以便于超声波传感器组件在光伏清洁机器人相对于光伏板行走时检测履带模块的前方的环境,保证了履带组件的避障效果。
技术研发人员:杨维全,卓国辉
受保护的技术使用者:深圳市小湾智能有限公司
技术研发日:20240523
技术公布日:2025/1/23
- 还没有人留言评论。精彩留言会获得点赞!