机器人喷漆系统的制作方法
1.本实用新型是一种机器人喷漆系统,用于铁路车辆轮对检修过程中对轮对的内外辐板以及轴身全自动油漆喷涂作业,设备喷漆全过程实现了无人化控制操作,有效的保护工人身体健康,减少了轮对喷涂过程中对环境的污染,提高了轮对的喷漆工艺质量。
背景技术:
2.随着社会的发展,智能化设备的应用已成为目前工业设备发展的趋势,根据铁运[2016]191号文件的要求:轮轴组装后,须在车轴轴身、车轮表面(踏面、轮缘和轮辋内、外侧面除外)、车轴防尘板座非配合面和轮座外露等部位均匀涂刷醇酸清漆或非苯类清漆,不得在踏面、轮缘和轮辋内、外侧涂刷清漆和其他介质,然而目前车辆段轮轴组装后涂刷稀释后的醇酸清漆全部采用工人手动涂刷,对工人的身体危害严重,现场环境脏乱差,且无法满足现场防火要求,易燃,与空气能形成爆炸性混合物。遇明火、高热极易燃烧爆炸。
技术实现要素:
[0003]
为了克服上述不足,本实用新型提供一种机器人喷漆系统,喷漆机器人可以根据轮对型号设定不同喷漆动作,仿人工形式带动喷枪完均匀的喷涂醇酸清漆,设备采用喷漆房封闭式结构可以有效防止漆雾的扩散,完成轮对的内外辐板以及轴身全自动油漆喷涂作业。
[0004]
为了实现上述目的,本实用新型提供以下技术方案:
[0005]
一种机器人喷漆系统,其特征在于:整机由进轮推送装置(1)、喷漆室(2)、出轮推送装置(3)、轮对定位装置(4)、轮对旋转装置(5)、喷漆机器人走行桁架(6)、喷漆机器人(7)组成;所述的进轮推送装置(1)是在设备的入轮位置,其由一个驱动气缸与v字型翻轮机构组成,气缸动作带动v字型翻轮机构向前翻转,从而将轮对推入轮对喷漆工位;所述的喷漆室(2)是采用方钢骨架焊接,外敷彩钢板的密闭喷漆房体,从而保证喷漆过程中漆雾不外散;所述的出轮推送装置(3)是由驱动气缸与杠杆臂组成,气缸伸出带动杠杆臂前端抬起,从而推动完成喷漆的轮对沿轨道滚动出喷漆室(2);所述的轮对定位装置(4)是由轮对支撑气缸与轴承上部勾臂组成,轮对支撑气缸升起带动其前端轴承支撑仿形圆弧,仿形圆弧与轮对轴承接触,从而将轮对支撑升起,使得轴承与其上部勾臂接触,保证轮对处于悬空状态;所述的轮对旋转装置(5)安装在轮对定位装置(4)勾臂上部,其由减速电机与前端的驱动胶轮组成,当轮对升起后轮对踏面与胶轮接触,减速电机带动胶轮旋转从而使轮对跟着旋转;所述的喷漆机器人走行桁架(6)其位于轮对定位装置(4)出轮端,其采用龙门式结构,其两侧立柱横跨于轮对轨道两侧,其上部横梁上安装有直线导轨,其直线导轨上安装有喷漆机器人(7);所述的喷漆机器人(7)是一套六轴覆盖半径为2000mm的机械手臂,其底座部分安装在喷漆机器人走行桁架(6)上部横梁的直线导轨上,其手臂前端安装有喷漆用自动喷枪,喷漆机器人按照预定动作带动喷枪完成轮对的内外辐板以及轴身全自动油漆喷涂作业。
[0006]
该设备设计合理、结构紧凑、工艺先进、操作简便、运行稳定、自动化程度较高,是针对铁路车辆轮对检修过程中对轮对的内外辐板以及轴身油漆喷涂作业的全自动智能设备,其主要特点如下:
[0007]
1.设备工艺流程合理,喷涂效率高;
[0008]
2.结构简单,检修方便;
[0009]
3.采用六轴机械臂可以根据轮对型号设定不同喷漆动作,仿人工形式带动喷枪完成均匀喷涂醇酸清漆;
附图说明
[0010]
以下结合附图和实施例对本实用新型作进一步说明:
[0011]
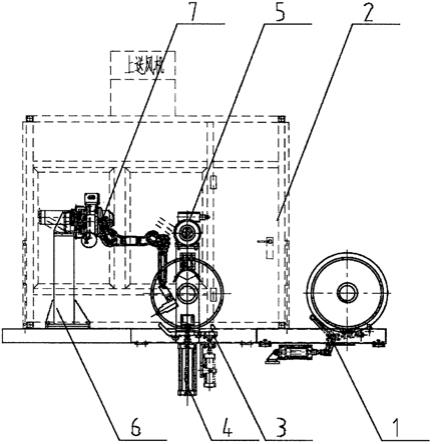
图1:机器人喷漆系统侧视图;
[0012]
图2:出轮推送装置(3)、轮对定位装置(4)、轮对旋转装置(5)正视图;
[0013]
图3:喷漆机器人走行桁架(6)、喷漆机器人(7)正视图;
[0014]
图4:进轮推送装置(1)、出轮推送装置(3)、轮对定位装置(4)、轮对旋转装置(5)、喷漆机器人走行桁架(6)、喷漆机器人(7)俯视图;
[0015]
图中:1
‑
进轮推送装置、2
‑
喷漆室、3
‑
出轮推送装置、4
‑
轮对定位装置、5
‑
轮对旋转装置、6
‑
喷漆机器人走行桁架、7
‑
喷漆机器人。
具体实施方式
[0016]
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例;基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
[0017]
请参阅附图1:整机由进轮推送装置(1)、喷漆室(2)、出轮推送装置(3)、轮对定位装置(4)、轮对旋转装置(5)、喷漆机器人走行桁架(6)、喷漆机器人(7)组成;所述的进轮推送装置(1)是在设备的入轮位置,其由一个驱动气缸与v字型翻轮机构组成,气缸动作带动v字型翻轮机构向前翻转,从而将轮对推入轮对喷漆工位;所述的喷漆室(2)是采用方钢骨架焊接,外敷彩钢板的密闭喷漆房体,从而保证喷漆过程中漆雾不外散;所述的出轮推送装置(3)是由驱动气缸与杠杆臂组成,气缸伸出带动杠杆臂前端抬起,从而推动完成喷漆的轮对沿轨道滚动出喷漆室(2);所述的轮对定位装置(4)是由轮对支撑气缸与轴承上部勾臂组成,轮对支撑气缸升起带动其前端轴承支撑仿形圆弧,仿形圆弧与轮对轴承接触,从而将轮对支撑升起,使得轴承与其上部勾臂接触,保证轮对处于悬空状态;所述的轮对旋转装置(5)安装在轮对定位装置(4)勾臂上部,其由减速电机与前端的驱动胶轮组成,当轮对升起后轮对踏面与胶轮接触,减速电机带动胶轮旋转从而使轮对跟着旋转;所述的喷漆机器人走行桁架(6)其位于轮对定位装置(4)出轮端,其采用龙门式结构,其两侧立柱横跨于轮对轨道两侧,其上部横梁上安装有直线导轨,其直线导轨上安装有喷漆机器人(7);所述的喷漆机器人(7)是一套六轴覆盖半径为2000mm的机械手臂,其底座部分安装在喷漆机器人走行桁架(6)上部横梁的直线导轨上,其手臂前端安装有喷漆用自动喷枪,喷漆机器人按照预定动作带动喷枪完成轮对的内外辐板以及轴身全自动油漆喷涂作业。
[0018]
本实用新型应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本实用新型的方法及其核心思想;同时,对于本领域的一般技术人员,依据本实用新型的思想,在具体实施方式及应用范围上均会有改变之处;综上,本说明书内容不应理解为对本实用新型的限制。
技术特征:
1.一种机器人喷漆系统,其特征在于:整机由进轮推送装置(1)、喷漆室(2)、出轮推送装置(3)、轮对定位装置(4)、轮对旋转装置(5)、喷漆机器人走行桁架(6)、喷漆机器人(7)组成;所述的进轮推送装置(1)是在设备的入轮位置,其由一个驱动气缸与v字型翻轮机构组成,气缸动作带动v字型翻轮机构向前翻转,从而将轮对推入轮对喷漆工位;所述的喷漆室(2)是采用方钢骨架焊接,外敷彩钢板的密闭喷漆房体,从而保证喷漆过程中漆雾不外散;所述的出轮推送装置(3)是由驱动气缸与杠杆臂组成,气缸伸出带动杠杆臂前端抬起,从而推动完成喷漆的轮对沿轨道滚动出喷漆室(2);所述的轮对定位装置(4)是由轮对支撑气缸与轴承上部勾臂组成,轮对支撑气缸升起带动其前端轴承支撑仿形圆弧,仿形圆弧与轮对轴承接触,从而将轮对支撑升起,使得轴承与其上部勾臂接触,保证轮对处于悬空状态;所述的轮对旋转装置(5)安装在轮对定位装置(4)勾臂上部,其由减速电机与前端的驱动胶轮组成,当轮对升起后轮对踏面与胶轮接触,减速电机带动胶轮旋转从而使轮对跟着旋转;所述的喷漆机器人走行桁架(6)其位于轮对定位装置(4)出轮端,其采用龙门式结构,其两侧立柱横跨于轮对轨道两侧,其上部横梁上安装有直线导轨,其直线导轨上安装有喷漆机器人(7);所述的喷漆机器人(7)是一套六轴覆盖半径为2000mm的机械手臂,其底座部分安装在喷漆机器人走行桁架(6)上部横梁的直线导轨上,其手臂前端安装有喷漆用自动喷枪,喷漆机器人按照预定动作带动喷枪完成轮对的内外辐板以及轴身全自动油漆喷涂作业。
技术总结
本实用新型公开了一种机器人喷漆系统,整机由进轮推送装置、喷漆室、出轮推送装置、轮对定位装置、轮对旋转装置、喷漆机器人走行桁架、喷漆机器人组成;本实用新型提供的机器人喷漆系统,可以实现铁路车辆轮对检修过程中对轮对的内外辐板以及轴身全自动油漆喷涂作业,设备喷漆全过程实现了无人化控制操作,有效的保护工人身体健康,减少了轮对喷涂过程中对环境的污染,提高了轮对的喷漆工艺质量。提高了轮对的喷漆工艺质量。提高了轮对的喷漆工艺质量。
技术研发人员:唐拥军 王蕊 刘运丹 张琦 姚春刚 苏志敏 黄奕程 彭世全 张坤 颜士伟
受保护的技术使用者:齐齐哈尔四达铁路设备有限责任公司
技术研发日:2021.01.04
技术公布日:2021/10/29
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1