一种追踪模式的喷涂机器人翻转装置的制作方法
1.本实用新型涉及喷涂机器人领域,具体是一种追踪模式的喷涂机器人翻转装置。
背景技术:
2.喷涂机器人广泛应用于各种行业,一般有两种应用模式,定点喷涂模式和追踪喷涂模式。定点喷涂模式即喷涂机器人与待喷涂工件相对位置固定,应用场景单一。追踪喷涂模式即喷涂机器人处在固定位置,但待喷涂工件跟随输送装置一直向前运行,工件在运动的过程中被喷涂,即通常所说的边走边喷,这种应用模式广泛应用于各行各业。
3.在喷涂行业,待喷涂的工件可分为正面和反面,喷涂机器人需要将工件的正面和反面都喷涂完成,这个工件才算喷涂完成。喷涂机器人一般只能喷涂工件的正面,无法喷涂到工件的反面。为此需要翻转装置将工件进行180度翻转,将工件的反面与正面互换,以方便喷涂工件反面。在追踪喷涂模式,现有技术采用以下两种方法来实现工件的正反面喷涂:1、使用两台喷涂机器人,一台机器人放置在工件的正面,一台机器人放置在工件的反面,工件跟随输送装置向前运行,两台机器人追着工件喷涂,以此来实现机器人对工件的正面和反面的喷涂,该方法节省了翻转装置,降低了成本,但是增加了喷房体积,不利于吸收漆雾的水帘装置的安装,容易造成喷房的积漆,导致喷房环境恶化;2、使用一台喷涂机器人,工件跟随输送装置向前运行,到达机器人喷涂空间后,输送装置停止运行,机器人喷涂工件正面,当正面喷涂完成,固定的翻转装置将工件翻转180度,翻转完成后,机器人喷涂工件反面反面已经翻转到正面,喷涂完成后输送装置带着工件继续向前运行,该方法节省了一台喷涂机器人,降低了成本,但是大大增加了喷涂时间,大部分情况下满足不了客户的节拍要求,也没有实现输送装置持续运行的要求。为满足客户的节拍要求、实现输送装置持续运行的需求以及喷房合理设计布局的需求,一种追踪模式的喷涂机器人翻转装置必不可少。
技术实现要素:
4.为了解决上述问题,本实用新型提出一种追踪模式的喷涂机器人翻转装置。
5.一种追踪模式的喷涂机器人翻转装置,包括用于悬挂工件的吊具、带动吊具按照指定速度移动的喷房顶部输送链、在喷房顶部输送链的前进方向设置的机器人i底座和机器人ii底座、分别设置在机器人i底座和机器人ii底座上对工件进行喷涂的机器人i和机器人ii,还包括:
6.地面输送装置,设置在喷房顶部输送链正下方,用于与喷房顶部输送链实现速度差完成工件的翻转;
7.旋转齿轮,设置在吊具下方且与吊具运行方向和运行速度保持一致,用于使吊具带动旋转齿轮顺利通过地面输送装置;
8.感应开关组件,安装在地面输送装置上,用于感应旋转齿轮的位置及旋转角度。
9.所述的旋转齿轮与吊具的轴心线方向保持一致,均垂直于地面。
10.所述的吊具为杆状件。
11.所述的机器人i1和机器人ii设置在相对于地面输送装置的相同侧。
12.所述的地面输送装置包括与喷房顶部的喷房顶部输送链运动方向一致的传送皮带i、作为固定件与传送皮带i配合便于旋转齿轮啮合通过的传送皮带ii。
13.所述的地面输送装置的皮带齿规格与旋转齿轮的齿规格保持一致。
14.所述的感应开关组件包括安装在地面输送装置的入口处用于感应旋转齿轮位置后将信号传递给地面输送装置使得地面输送装置以两倍的速度加速运行的感应开关i、安装在地面输送装置的出口处用于感应旋转齿轮到位后地面输送装置恢复初始速度使得旋转齿轮旋转180度的感应开关ii。
15.本实用新型的有益效果是:本实用新型通过旋转齿轮有效规避了普通定点翻转装置需要地面输送装置停止后才能翻转吊具的问题,实现了地面输送装置实时运行状态下进行翻转,保证地面输送装置实时运行;旋转齿轮实现地面输送装置连续运行实时,吊具在线翻转,实现了机器人i和机器人ii边走边喷的功能,提高了喷涂节拍,提升了机器人的喷涂效果;通过旋转齿轮和感应开关组件使地面输送装置实时运行,不停机,确保喷涂完成后工件进入烤房的时间固定,保证了烘烤效果,提升了整体喷涂质量,避免了定点喷涂存在的时间不确定性问题;本实用新型结构简单,相比普通定点翻转装置,节约了成本,简化了设计,便于制作和维修。
附图说明
16.下面结合附图和实施例对本实用新型进一步说明。
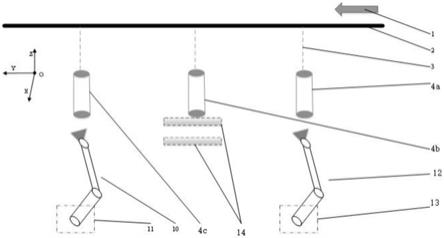
17.图1为本实用新型的运行结构示意图;
18.图2为本实用新型的主视结构示意图;
19.附图标记:1、前进方向;2、喷房顶部输送链;3、吊具;4、旋转齿轮;5、传送皮带i;6、传送皮带ii;7、感应开关i;8、感应开关ii;9、地面输送链前进方向;4a、旋转齿轮i;4b、旋转齿轮ii;4c、旋转齿轮iii;12、机器人i;13、机器人i底座;14、地面输送装置;10、机器人ii;11、机器人ii底座。
具体实施方式
20.为了使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面对本实用新型进一步阐述。
21.如图1和图2所示,一种追踪模式的喷涂机器人翻转装置,包括用于悬挂工件的吊具3、带动吊具3按照指定速度移动的喷房顶部输送链2、在喷房顶部输送链2的前进方向1设置的机器人i底座13和机器人ii底座11、分别设置在机器人i底座13和机器人ii底座11上对工件进行喷涂的机器人i12和机器人ii10,还包括:
22.地面输送装置14,设置在喷房顶部输送链2正下方,用于与喷房顶部输送链2实现速度差完成工件的翻转;
23.旋转齿轮4,设置在吊具3下方且与吊具3运行方向和运行速度保持一致,用于使吊具3带动旋转齿轮4顺利通过地面输送装置14;
24.感应开关组件,安装在地面输送装置14上,用于感应旋转齿轮4的位置及旋转角度。
25.附图标记9为地面输送链前进方向。
26.本实用新型通过旋转齿轮4有效规避了普通定点翻转装置需要地面输送装置14停止后才能翻转吊具的问题,实现了地面输送装置14实时运行状态下进行翻转,保证地面输送装置14实时运行;旋转齿轮实现地面输送装置14连续运行实时,吊具在线翻转,实现了机器人i12和机器人ii10边走边喷的功能,提高了喷涂节拍,提升了机器人的喷涂效果;通过旋转齿轮4和感应开关组件使地面输送装置14实时运行,不停机,确保喷涂完成后工件进入烤房的时间固定,保证了烘烤效果,提升了整体喷涂质量,避免了定点喷涂存在的时间不确定性问题;本实用新型结构简单,相比普通定点翻转装置,节约了成本,简化了设计,便于制作和维修。
27.所述的旋转齿轮4与吊具3的轴心线方向保持一致,均垂直于地面。
28.所述的地面输送装置14包括与喷房顶部的喷房顶部输送链2运动方向一致的传送皮带i5、作为固定件与传送皮带i5配合便于旋转齿轮4啮合通过的传送皮带ii6。
29.喷房顶部输送链2与传送皮带i5运行速度和方向一致,保证吊具3和旋转齿轮4相对静止运动,当需要翻转时,通过速度差来实现翻转功能。
30.所述的地面输送装置14的皮带齿规格与旋转齿轮4的齿规格保持一致,保证可靠啮合运行。
31.所述的传送皮带i5内部有1个电机,电机带动传送皮带i5持续运行。
32.所述的地面输送装置14目的是可靠的带动旋转齿轮4旋转。
33.所述的旋转齿轮4是为了使吊具3在通过地面输送装置14时,使吊具3通过旋转齿轮4顺利通过地面输送装置14。
34.所述的吊具3为杆状件,便于带动旋转齿轮4同速运行。
35.所述的机器人i12和机器人ii10设置在相对于地面输送装置14的相同侧。
36.当旋转齿轮4没有进入地面输送装置14时,其运行方向和运行速度与喷房顶部输送链2的运行方向和运行速度保持一致,当旋转齿轮4进入地面输送链装置时,地面输送装置14的传送皮带i5以两倍喷房顶部输送链2的运行速度运行,传送皮带ii6保持静止,其作用是方便旋转齿轮4啮合通过顺畅。
37.在正常的运行过程中,喷房顶部输送链2连续运行,带动吊具3沿着某一方向运行,当吊具3运行到地面输送装置14时,旋转齿轮4的齿与地面输送装置14的齿开始咬合,因为传送皮带i5和喷房顶部输送链2的运行方向一致,那么地面输送装置14将带动旋转齿轮4旋转,以此达到吊具3旋转的作用。
38.所述的感应开关组件包括安装在地面输送装置14的入口处用于感应旋转齿轮4位置后将信号传递给地面输送装置14使得地面输送装置14以两倍的速度加速运行的感应开关i7、安装在地面输送装置14的出口处用于感应旋转齿轮4到位后地面输送装置14恢复初始速度使得旋转齿轮4旋转180度的感应开关ii8,用于可靠定位翻转180度。
39.当旋转齿轮4运行到感应开关组件的上方时,感应开关输出信号,感应开关i7用来确认旋转齿轮4的到来,感应开关ii8用来确认旋转齿轮4的旋转角度,该改进的目的是可靠的控制旋转齿轮4的旋转角度。
40.感应开关i7和感应开关ii8的距离需要设定:
41.设定距离需要考虑两个因素:1、旋转齿轮4和地面输送装置14的齿规格;2、地面输
送装置14和喷房顶部输送链2的速度差,举例:
42.1>旋转齿轮的规格是24*8,一共24齿,齿规格是8mm,地面输送装置14的齿也是8mm,吊具3旋转180度,即旋转齿轮4旋转180度;2>传送皮带i5和喷房顶部输送链2以相同方向相同速度运行,即40mm/s;3>当旋转齿轮4触碰到感应开关i7时,传送皮带i5以两倍喷房顶部输送链2速度运行,即80mm/s;4>旋转齿轮4旋转180度,即旋转齿轮4旋转12齿,距离为12*8=96mm;将感应开关ii8距离感应开关i7相距96mm安装;5>计算时间:96/80
‑
40=2.4s,地面输送装置14以两倍速度运行2.4s后,此时旋转齿轮4触碰到感应开关ii8,恢复初始速度,即40mm/s,此时旋转齿轮4脱离地面输送装置14;6>这样就完成了吊具3旋转180度的功能,即吊具3正面和反面调换。
43.如图1所示,在实际工作中,为了方便表达位置,旋转齿轮4分别表达为不同位置的旋转齿轮i4a、旋转齿轮ii4b、旋转齿轮iii4c。
44.工作过程如下:
45.s1、喷房顶部输送链2以对应前进方向1运行,机器人i12固定在机器人i底座13上,机器人ii10固定在机器人ii底座11上,机器人i和机器人ii处在相同侧;
46.s2、挂载工件的吊具3安装在喷房顶部输送链2的吊钩中,吊具3下方的旋转齿轮i4a安装在挂载工件的吊具3下方;传送皮带i5保持和喷房顶部输送链2运行速度和运行方向一致,且喷房顶部输送链2速度固定;
47.s3、喷房顶部输送链2带动吊具运动,当运动到机器人i12位置时,机器人i12喷涂吊具上的工件,机器人i12只喷涂工件的正面区域,此时工件持续向前运动,机器人i12处于边走边喷模式,进入步骤4;
48.s4、工件跟随喷房顶部输送链2持续前进,当工件正面喷涂完成后,机器人i12停止喷涂,进入步骤5;
49.s5、工件继续前进,当工件到达地面输送装置14时,即吊具下方的旋转齿轮ii4b的位置,旋转齿轮ii4b触发图1中的感应开关i7,此时传送皮带i5以两倍的速度加速运行,旋转齿轮ii4b带动吊具3旋转;当旋转齿轮4触碰到图1种的感应开关ii时,传送皮带i5恢复初始速度,此时旋转齿轮4旋转180度,工件的正面旋转到反面,原来的反面变成机器人的正面,进入步骤6;
50.s6、工件继续前进,当工件到达机器人ii10位置,也就是吊具3下方的旋转齿轮iii4c位置,机器人ii10喷涂吊具3上的工件,此时工件持续向前运动,机器人ii10处于边走边喷模式,进入步骤7;
51.s7、工件跟随喷房顶部输送链2持续前进,当工件反面喷涂完成后,机器人ii10停止喷涂,进入步骤8;
52.s8、此时工件的正反面全部喷涂完成,进入步骤3,以此循环往复。
53.如图1和图2中的坐标所示,x表示机器人i12和机器人ii10的x方向,y表示机器人i12和机器人ii10的y方向,z表示机器人i12和机器人ii10的z方向。
54.以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求
保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1