一种视觉点胶机器人多工位点胶机构的制作方法
1.本实用新型涉及点胶机领域,尤其涉及一种视觉点胶机器人多工位点胶机构。
背景技术:
2.点胶机设备,就是在半导体、芯片、通讯产品等表面点、涂胶水,根据特定的产品设定配套的路径编程,以便实现更好粘接效果的一种自动化点胶设备,具有点、线、面、圆弧、不规则曲线连续补间等功能。
3.但是由于现有的多工位点胶机构在使用时通过多个管道同时驱动多个点胶头,多个管道与同一个气压装置连接,导致点胶头的移动距离会出现差异,导致点胶机表面相同批次产品的质量却不相同,造成不必要的麻烦。
技术实现要素:
4.本实用新型的目的在于提供一种视觉点胶机器人多工位点胶机构,以解决上述技术问题。
5.本实用新型为解决上述技术问题,采用以下技术方案来实现:一种视觉点胶机器人多工位点胶机构,包括机壳,所述机壳的前端固定有快速接头,所述快速接头的右方在机壳的前端位置处固定有固定装置,所述机壳的下端滑动连接有伸缩柱,所述伸缩柱的下端固定有点胶装置,所述点胶装置包括点胶头,所述点胶头的前端固定有插接槽,所述插接槽的前端插接有插接杆。
6.优选的,所述插接槽的内表面设置有限位凸起,所述插接杆的表面设置有限位凹陷且卡接在插接槽表面的限位凸起内部。
7.优选的,所述点胶头的上端固定在伸缩柱的表面,所述点胶头的下端固定有点胶管。
8.优选的,所述固定装置包括固定板,所述固定板的右端固定有联动杆,所述联动杆的上端和下端固定有滑块,所述联动杆的右端固定有按压板。
9.优选的,所述机壳的前端设置有滑槽,所述滑块与机壳表面的滑槽滑动连接。
10.优选的,所述按压板的中间设置有弹簧,所述固定板的表面设置有开槽且开槽内表面直径与外部管道外表面直径相等。
11.本实用新型的有益效果是:
12.1.本实用新型通过插接杆能插入插接槽内部,使两个点胶头的移动同步进行,从而使点胶头移动到相同的位置对设备进行点胶,避免两个点胶头不同步达不到点胶要求,保证不同工位上的设备出厂的质量相同,从而减少不必要的废品浪费。
13.2.本实用新型通过固定装置能有效限制快速接头表面管道的位置,使管道能稳定固定在快速接头表面,保证快速接头和管道连接处密封,避免漏气导致的点胶精度的下降,增加点胶精度从而提高产品质量。
附图说明
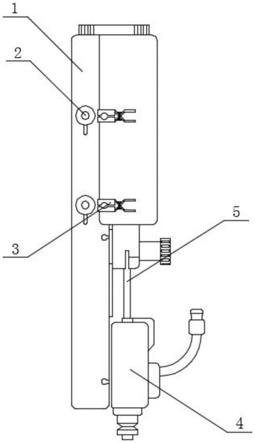
14.图1为本实用新型的结构示意图;
15.图2为本实用新型点胶装置的结构示意图;
16.图3为本实用新型固定装置的结构示意图;
17.附图标记:1、机壳;2、快速接头;3、固定装置;4、点胶装置;5、伸缩柱;31、固定板;32、滑块;33、按压板;34、联动杆;41、点胶头;42、插接杆;43、插接槽。
具体实施方式
18.为了使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施例和附图,进一步阐述本实用新型,但下述实施例仅仅为本实用新型的优选实施例,并非全部。基于实施方式中的实施例,本领域技术人员在没有做出创造性劳动的前提下所获得其它实施例,都属于本发明的保护范围。
19.下面结合附图描述本实用新型的具体实施例。
20.实施例1
21.如图1
‑
2所示,一种视觉点胶机器人多工位点胶机构,包括机壳1,机壳1的前端固定有快速接头2,快速接头2的右方在机壳1的前端位置处固定有固定装置3,机壳1的下端滑动连接有伸缩柱5,伸缩柱5的下端固定有点胶装置4,点胶装置4包括点胶头41,点胶头41的前端固定有插接槽43,插接槽43的前端插接有插接杆42。
22.将机壳1固定在外部设备表面,移动点胶机构到合适的位置后,将快速接头2通过管道与外部气体装置连接,控制外部气体装置箱快速接头2内部充气,气体将伸缩柱5向外挤压,则伸缩柱5向下移动带动点胶装置4移动,当两个点胶头41点胶过程中出现不同步时,移动插接杆42使插接杆42对准插接槽43,将插接杆42固定在插接槽43内部,则两个点胶头41相互连接,从而使两个点胶头41的移动同步,通过插接杆42能插入插接槽43内部,使两个点胶头41的移动同步进行,从而使点胶头41移动到相同的位置对设备进行点胶,避免两个点胶头41不同步达不到点胶要求,保证不同工位上的设备出厂的质量相同,从而减少不必要的废品浪费。
23.实施例2
24.如图1
‑
3所示,一种视觉点胶机器人多工位点胶机构,包括机壳1,机壳1的前端固定有快速接头2,快速接头2的右方在机壳1的前端位置处固定有固定装置3,机壳1的下端滑动连接有伸缩柱5,伸缩柱5的下端固定有点胶装置4,固定装置3包括固定板31,固定板31的右端固定有联动杆34,联动杆34的上端和下端固定有滑块32,联动杆34的右端固定有按压板33。
25.按压按压板33,按压板33受到挤压带动联动杆34转动,按压板33转动时挤压弹簧使弹簧形变,联动杆34转动带动固定板31移动,则固定板31之间的距离增加,推动固定装置3向左移动,则滑块32在机壳1表面的滑槽内部滑动,固定板31表面的开槽位于快速接头2表面管道的两端,松开按压板33,则弹簧形变回复,固定板31卡在管道表面,通过固定装置3能有效限制快速接头2表面管道的位置,使管道能稳定固定在快速接头2表面,保证快速接头2和管道连接处密封,避免漏气导致的点胶精度的下降,增加点胶精度从而提高产品质量。
26.在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之
“
下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
27.以上显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的仅为本实用新型的优选例,并不用来限制本实用新型,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
技术特征:
1.一种视觉点胶机器人多工位点胶机构,包括机壳(1),其特征在于:所述机壳(1)的前端固定有快速接头(2),所述快速接头(2)的右方在机壳(1)的前端位置处固定有固定装置(3),所述机壳(1)的下端滑动连接有伸缩柱(5),所述伸缩柱(5)的下端固定有点胶装置(4),所述点胶装置(4)包括点胶头(41),所述点胶头(41)的前端固定有插接槽(43),所述插接槽(43)的前端插接有插接杆(42)。2.根据权利要求1所述的一种视觉点胶机器人多工位点胶机构,其特征在于:所述插接槽(43)的内表面设置有限位凸起,所述插接杆(42)的表面设置有限位凹陷且卡接在插接槽(43)表面的限位凸起内部。3.根据权利要求2所述的一种视觉点胶机器人多工位点胶机构,其特征在于:所述点胶头(41)的上端固定在伸缩柱(5)的表面,所述点胶头(41)的下端固定有点胶管。4.根据权利要求1所述的一种视觉点胶机器人多工位点胶机构,其特征在于:所述固定装置(3)包括固定板(31),所述固定板(31)的右端固定有联动杆(34),所述联动杆(34)的上端和下端固定有滑块(32),所述联动杆(34)的右端固定有按压板(33)。5.根据权利要求4所述的一种视觉点胶机器人多工位点胶机构,其特征在于:所述机壳(1)的前端设置有滑槽,所述滑块(32)与机壳(1)表面的滑槽滑动连接。6.根据权利要求5所述的一种视觉点胶机器人多工位点胶机构,其特征在于:所述按压板(33)的中间设置有弹簧,所述固定板(31)的表面设置有开槽且开槽内表面直径与外部管道外表面直径相等。
技术总结
本实用新型提供一种视觉点胶机器人多工位点胶机构,包括机壳,所述机壳的前端固定有快速接头,所述快速接头的右方在机壳的前端位置处固定有固定装置,所述机壳的下端滑动连接有伸缩柱,所述伸缩柱的下端固定有点胶装置,本实用新型通过插接杆能插入插接槽内部,使两个点胶头的移动同步进行,从而使点胶头移动到相同的位置对设备进行点胶,避免两个点胶头不同步达不到点胶要求,保证不同工位上的设备出厂的质量相同,从而减少不必要的废品浪费。从而减少不必要的废品浪费。从而减少不必要的废品浪费。
技术研发人员:胡根发
受保护的技术使用者:广州市鸿升自动化设备有限公司
技术研发日:2021.02.24
技术公布日:2021/11/9
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1