一种异形复合材料自动涂双组份结构胶粘接系统的制作方法
1.本实用新型涉及汽车配件生产设备技术领域,具体为一种异形复合材料自动涂双组份结构胶粘接系统。
背景技术:
2.现有的复合材料自动涂胶一般使用热熔胶粘接,通常热熔胶虽然固化速度快,可粘接对象范围广,但在性能上具有一些局限性,比如耐热性不够,受季节和气候的湿度影响大。对于汽车尾门等零件热熔胶无法满足其粘接强度的需求,随着科技的发展,异形复合材料自动涂双组份结构胶粘接系统有了很大程度的发展,它的发展给人们在对汽车配件生产时带来了很大的便利,其种类和数量也正在与日俱增。
3.目前市场上的异形复合材料自动涂双组份结构胶粘接系统有这样的不足,装置在使用时不能够将产品均匀的进行粘接,导致产品制造后其品质较低,因此要对现在的异形复合材料自动涂双组份结构胶粘接系统进行改进。
技术实现要素:
4.本实用新型的目的在于提供一种异形复合材料自动涂双组份结构胶粘接系统,以解决上述背景技术提出的装置在使用时不能够将产品均匀的进行粘接,导致产品制造后其品质较低的问题。
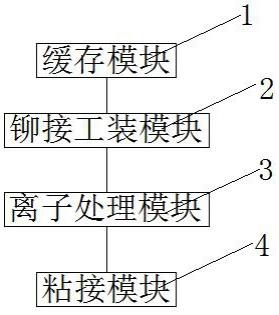
5.为实现上述目的,本实用新型提供如下技术方案:一种异形复合材料自动涂双组份结构胶粘接系统,包括缓存模块、离子处理模块和粘接模块,所述缓存模块与铆接工装模块相连接,所述铆接工装模块与离子处理模块相连接,所述离子处理模块与粘接模块相连接。
6.优选的,所述缓存模块包括上缓存架和下缓存架,所述上缓存架的一侧设置有下缓存架。
7.优选的,所述铆接工装模块包括主机架、仿形定位、拉铆枪、旋转气缸和产品检测器,所述主机架内部设置有仿形定位,所述仿形定位的底部设置有拉铆枪,所述拉铆枪的底部连接有主机架,所述主机架的内部安装有旋转气缸,所述旋转气缸的底部安装有产品检测器,所述旋转气缸的底部连接有仿形定位。
8.优选的,所述仿形定位和产品检测器与旋转气缸的连接处相互垂直,且旋转气缸的一端主视截面为“t”型结构,并且旋转气缸的表面与主机架的内壁之间为滑动连接结构。
9.优选的,所述离子处理模块包括等离子电极、机器人和喷嘴,所述等离子电极一侧连接有机器人,所述机器人的一端连接有喷嘴。
10.优选的,所述粘接模块包括主框架、仿形模具、翻转机构和压合装置,所述主框架的内部安装有仿形模具,所述仿形模具的一侧连接有翻转机构,所述翻转机构的底部连接有压合装置。
11.与现有技术相比,本实用新型的有益效果是:
12.1.该异形复合材料自动涂双组份结构胶粘接系统,将产品放置在仿形定位上,通过产品检测器对产品进行检测,当产品检测器检测到产品时,启动旋转气缸,旋转气缸配合装置的一端进行旋转,同时产品在仿形定位上转动,从而能够更加方便的对产品进行定位。
13.2.该异形复合材料自动涂双组份结构胶粘接系统,启动翻转机构,人工将物料放置在仿形模具上,再启动翻转机构,翻转机构带动物料翻转,直到翻转机构恢复原位,从而使得工作人员能够更加方便的对产品进行粘接处理,避免传统粘接工艺中,粘接强度不均匀。
附图说明
14.图1为本实用新型流程示意图;
15.图2为本实用新型俯视示意图;
16.图3为本实用新型铆接工装模块示意图;
17.图4为本实用新型粘接模块示意图。
18.图中:1、缓存模块;101、上缓存架;102、下缓存架;2、铆接工装模块;201、主机架;202、仿形定位;203、拉铆枪;204、旋转气缸;205、产品检测器;3、离子处理模块;301、等离子电极;302、机器人;303、喷嘴;4、粘接模块;401、主框架;402、仿形模具;403、翻转机构;404、压合装置。
具体实施方式
19.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
20.请参阅图1
‑
4,本实用新型提供一种技术方案:一种异形复合材料自动涂双组份结构胶粘接系统,包括缓存模块1、铆接工装模块2、离子处理模块3、粘接模块4,所述缓存模块1与铆接工装模块2相连接,所述缓存模块1包括上缓存架101和下缓存架102,所述上缓存架101的一侧设置有下缓存架102,便于通过上缓存架101和下缓存架102放置物料,所述铆接工装模块2与离子处理模块3相连接,所述铆接工装模块2包括主机架201、仿形定位202、拉铆枪203、旋转气缸204和产品检测器205,所述主机架201内部设置有仿形定位202,所述仿形定位202的底部设置有拉铆枪203,所述仿形定位202和产品检测器205与旋转气缸204的连接处相互垂直,且旋转气缸204的一端主视截面为“t”型结构,并且旋转气缸204的表面与主机架201的内壁之间为滑动连接结构,便于旋转气缸204在主机架201内部转动,所述拉铆枪203的底部连接有主机架201,所述主机架201的内部安装有旋转气缸204,所述旋转气缸204的底部安装有产品检测器205,所述旋转气缸204的底部连接有仿形定位202,便于通过旋转气缸204带动仿形定位202和产品检测器205转动,所述离子处理模块3与粘接模块4相连接,所述离子处理模块3包括等离子电极301、机器人302和喷嘴303,所述等离子电极301一侧连接有机器人302,所述机器人302的一端连接有喷嘴303,便于通过机器人302控制喷嘴303进行等离子喷涂,所述粘接模块4包括主框架401、仿形模具402、翻转机构403和压合装置404,所述主框架401的内部安装有仿形模具402,所述仿形模具402的一侧连接有翻转
机构403,所述翻转机构403的底部连接有压合装置404,便于通过粘接模块4对产品进行粘合连接。
21.工作原理:在使用异形复合材料自动涂双组份结构胶粘接系统,首先将产品放置在仿形定位202上,通过产品检测器205对产品进行检测,当产品检测器205检测到产品时,启动旋转气缸204,旋转气缸204配合装置的一端进行旋转,同时产品在仿形定位202上转动,从而能够更加方便的对产品进行定位,启动翻转机构403,人工将物料放置在仿形模具402上,再启动翻转机构403,翻转机构403带动物料翻转,直到翻转机构403恢复原位,从而使得工作人员能够更加方便的对产品进行粘接处理,避免传统粘接工艺中,粘接强度不均匀,这就是异形复合材料自动涂双组份结构胶粘接系统的特点,本说明中未作详细描述的内容属于本领域专业技术人员公知的现有技术。
22.尽管参照前述实施例对本实用新型进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
技术特征:
1.一种异形复合材料自动涂双组份结构胶粘接系统,包括缓存模块(1)、离子处理模块(3)和粘接模块(4),所述缓存模块(1)与铆接工装模块(2)相连接,其特征在于:所述铆接工装模块(2)与离子处理模块(3)相连接,所述离子处理模块(3)与粘接模块(4)相连接。2.根据权利要求1所述的一种异形复合材料自动涂双组份结构胶粘接系统,其特征在于:所述缓存模块(1)包括上缓存架(101)和下缓存架(102),所述上缓存架(101)的一侧设置有下缓存架(102)。3.根据权利要求1所述的一种异形复合材料自动涂双组份结构胶粘接系统,其特征在于:所述铆接工装模块(2)包括主机架(201)、仿形定位(202)、拉铆枪(203)、旋转气缸(204)和产品检测器(205),所述主机架(201)内部设置有仿形定位(202),所述仿形定位(202)的底部设置有拉铆枪(203),所述拉铆枪(203)的底部连接有主机架(201),所述主机架(201)的内部安装有旋转气缸(204),所述旋转气缸(204)的底部安装有产品检测器(205),所述旋转气缸(204)的底部连接有仿形定位(202)。4.根据权利要求3所述的一种异形复合材料自动涂双组份结构胶粘接系统,其特征在于:所述仿形定位(202)和产品检测器(205)与旋转气缸(204)的连接处相互垂直,且旋转气缸(204)的一端主视截面为“t”型结构,并且旋转气缸(204)的表面与主机架(201)的内壁之间为滑动连接结构。5.根据权利要求1所述的一种异形复合材料自动涂双组份结构胶粘接系统,其特征在于:所述离子处理模块(3)包括等离子电极(301)、机器人(302)和喷嘴(303),所述等离子电极(301)一侧连接有机器人(302),所述机器人(302)的一端连接有喷嘴(303)。6.根据权利要求1所述的一种异形复合材料自动涂双组份结构胶粘接系统,其特征在于:所述粘接模块(4)包括主框架(401)、仿形模具(402)、翻转机构(403)和压合装置(404),所述主框架(401)的内部安装有仿形模具(402),所述仿形模具(402)的一侧连接有翻转机构(403),所述翻转机构(403)的底部连接有压合装置(404)。
技术总结
本实用新型公开一种异形复合材料自动涂双组份结构胶粘接系统,包括缓存模块、离子处理模块和粘接模块,所述缓存模块与铆接工装模块相连接,所述铆接工装模块与离子处理模块相连接,所述离子处理模块与粘接模块相连接,所述铆接工装模块包括主机架、仿形定位、拉铆枪、旋转气缸和产品检测器,所述主机架内部设置有仿形定位。该异形复合材料自动涂双组份结构胶粘接系统,启动翻转机构,人工将物料放置在仿形模具上,再启动翻转机构,翻转机构带动物料翻转,直到翻转机构恢复原位,从而使得工作人员能够更加方便的对产品进行粘接处理,避免传统粘接工艺中,粘接强度不均匀。粘接强度不均匀。粘接强度不均匀。
技术研发人员:梁子斌
受保护的技术使用者:青岛伟奥通自动化系统有限公司
技术研发日:2021.04.28
技术公布日:2021/11/9
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1