一种机器人零部件喷涂装置的制作方法
本发明涉及机器人生产设备,具体为一种机器人零部件喷涂装置。
背景技术:
1、机器人是自动执行工作的机器装置,它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动,它的任务是协助或取代人类工作的工作,例如生产业、建筑业或是危险的工作,在机器人生产的过程中,需要对机器人的零部件进行喷漆,用来防止其老化或者生锈。
2、喷涂通过喷枪或碟式雾化器,借助于压力或离心力,分散成均匀而微细的雾滴,施涂于被涂物表面的涂装方法。可分为空气喷涂、无空气喷涂、静电喷涂以及上述基本喷涂形式的各种派生的方式,如大流量低压力雾化喷涂、热喷涂、自动喷涂、多组喷涂等。
3、随着社会的不断发展,各行各业将大部分的人工作业转换为由机器人替代人工的转变,为了到达机器人表面的美观效果,通常会利用涂料对机器人零件的表面进行喷涂处理,可以在基体材料表面上人工形成一层与基体的机械、物理和化学性能不同的表层,满足产品的耐蚀性、耐磨性、装饰或其他特种功能要求。所以,为了满足人们的需求,在机器人的生产过程中,会对机器人的各个零配件进行表层喷涂。
4、现有的机器人喷涂装置,在对机器人零件进行喷涂的过程中,角度单一,无法对零件进行多方位的进行喷涂调节,使得在喷完后,零件部分地方,导致没有喷到,需要进行二次复喷,导致浪费时间,费时费力。
技术实现思路
1、鉴于现有技术中所存在的问题,本发明公开了一种机器人零部件喷涂装置,采用的技术方案是,包括底座,所述底座内设有控制电路,所述底座的顶面设有环槽,所述环槽内设有驱动机构,所述驱动机构包括一号空腔、穿孔、驱动齿轮、环形齿轮、限位槽、限位块、连接块、驱动电机,所述环槽旁设有所述一号空腔,所述一号空腔内设有所述驱动电机,所述环形齿轮转动连接在所述环槽内,所述环槽内设有限位块,所述环形齿轮的底面设有限位槽,所述限位槽与所述限位块之间相适配,所述环槽与所述一号空腔之间通过所述穿孔连通,所述驱动电机的驱动轴上设有所述驱动齿轮,所述驱动齿轮穿过所述穿孔与所述环形齿轮之间相互啮合,所述环形齿轮的顶面设有所述连接块,所述连接块的顶面通过所述调节角度机构相连,所述调节角度机构上设有夹持机构,所述底座的中部设有孔,所述孔内设有所述旋转机构,通过限位槽与限位块切面均为t形,使环形齿轮固定在环槽内。
2、作为本发明的一种优选技术方案,所述调节角度机构包括调节块、滑槽、同步轮、调节电机,所述调节块为“c”形件,所述调节块的内面设有所述滑槽,所述滑槽内设有分割块,所述分割块共两组、前后对称设置,所述分割块将所述滑槽分为内部和外部,所述滑槽的两端、所述内部内转动连接有所述同步轮,两组所述同步轮之间通过所述同步带相连,所述调节块的外壁上设有所述调节电机,所述调节电机与所述同步轮之间相连,所述滑槽内滑动连接有所述夹持机构,所述夹持机构连接所述同步带的外壁,通过调节块为“c”形,使滑动连接在滑槽内的移动块可以进行多方位调节。
3、作为本发明的一种优选技术方案,所述滑槽内设有定位柱,所述定位柱设有多组与所述同步带的内壁之间滑动连接。
4、作为本发明的一种优选技术方案,所述夹持机构包括移动块、凹槽、螺杆、夹板,所述移动块滑动连接在所述滑槽内、且所述移动块的切面为“工”字形,所述移动块的向外端设有所述凹槽,所述凹槽内转动连接有所述螺杆,所述螺杆上设有两段旋向相反的螺纹端,所述螺杆上螺纹连接有所述夹板,所述夹板共两组。
5、作为本发明的一种优选技术方案,所述底座的顶面设有防护外壳,所述防护外壳为透明材质、且正面铰接有两扇门,通过透明材质,便于使用人员进行观察内部情况。
6、作为本发明的一种优选技术方案,所述旋转机构包括底块、二号空腔、旋转电机、底板、支撑件、旋转板、支撑柱,所述底块内设有所述二号空腔,所述二号空腔内设有所述旋转电机,所述底板设在所述底块的顶面,所述底板的上方设有所述旋转板,所述底板与所述旋转板之间通过所述支撑件相连,所述旋转板与所述支撑件之间转动连接,所述旋转电机的驱动轴穿过所述底板连接所述旋转板,所述旋转板的顶面设有插孔,所述插孔内可拆卸连接有所述支撑柱。
7、作为本发明的一种优选技术方案,所述支撑柱有三种分别为长、中、短,所述长为20cm,所述中为15cm,所述短为10cm。
8、本发明的有益效果:本发明通过一号空腔内的驱动电机、驱动齿轮与环槽内的环形齿轮之间相互配合,带动调节块整体进行旋转,从而在通过调节块内的夹持机构、同步带、调节电机、同步轮之间的配合控制夹持机构所处的位置,从而对处于旋转机构上的机器人零部件,进行多角度多方位的喷涂作业,防止因为零部件的多样性导致,在喷涂作业过程中,造成喷涂不均、漏喷、遗喷,通过本技术方案的多角度全方位的旋转配合,使得整个喷涂作业省时省力,调高了工作效率。
9、进一步的,通过旋转机构上的插孔与支撑柱之间的相互配合,可以根据模型的规格进行相应的调节,并且支撑柱之间可以组装,提高支撑柱的实用性。
10、进一步的,避免在喷涂作业是,喷漆飞洒到工作人员身上,防护外壳起到保护的效果,避免工作人员身上沾染喷漆。
技术特征:
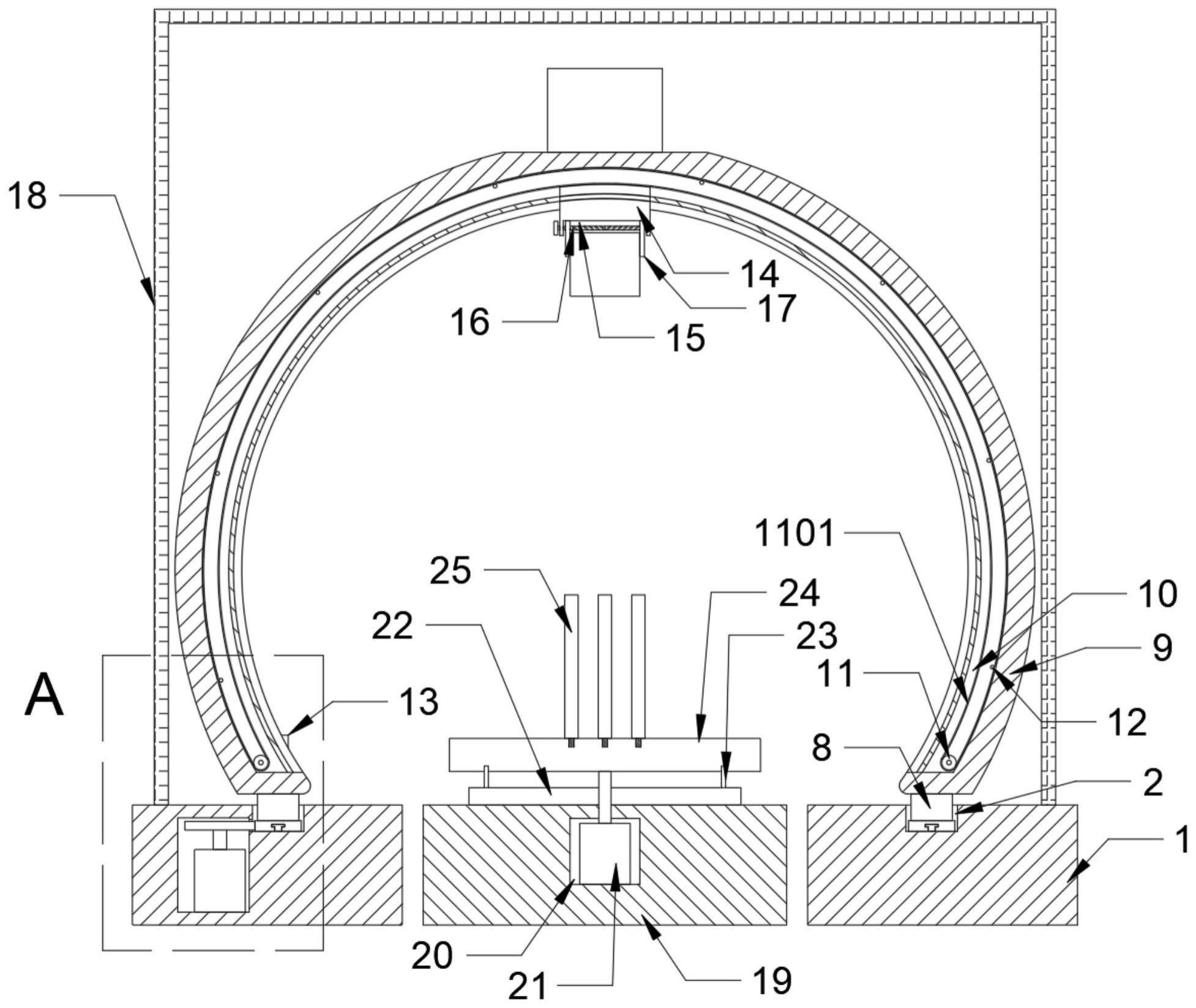
1.一种机器人零部件喷涂装置,包括底座(1),所述底座(1)内设有控制电路,其特征在于:所述底座(1)的顶面设有环槽(2),所述环槽(2)内设有驱动机构,所述驱动机构包括一号空腔(3)、穿孔(4)、驱动齿轮(5)、环形齿轮(6)、限位槽(601)、限位块(7)、连接块(8)、驱动电机(26),所述环槽(2)旁设有所述一号空腔(3),所述一号空腔(3)内设有所述驱动电机(26),所述环形齿轮(6)转动连接在所述环槽(2)内,所述环槽(2)内设有限位块(7),所述环形齿轮(6)的底面设有限位槽(601),所述限位槽(601)与所述限位块(7)之间相适配,所述环槽(2)与所述一号空腔(3)之间通过所述穿孔(4)连通,所述驱动电机(26)的驱动轴上设有所述驱动齿轮(5),所述驱动齿轮(5)穿过所述穿孔(4)与所述环形齿轮(6)之间相互啮合,所述环形齿轮(6)的顶面设有所述连接块(8),所述连接块(8)的顶面通过所述调节角度机构相连,所述调节角度机构上设有夹持机构,所述底座(1)的中部设有孔,所述孔内设有所述旋转机构。
2.根据权利要求1所述的一种机器人零部件喷涂装置,其特征在于:所述调节角度机构包括调节块(9)、滑槽(10)、同步轮(11)、调节电机(13),所述调节块(9)为“c”形件,所述调节块(9)的内面设有所述滑槽(10),所述滑槽(10)内设有分割块,所述分割块共两组、前后对称设置,所述分割块将所述滑槽(10)分为内部和外部,所述滑槽(10)的两端、所述内部内转动连接有所述同步轮(11),两组所述同步轮(11)之间通过所述同步带(1101)相连,所述调节块(9)的外壁上设有所述调节电机(13),所述调节电机(13)与所述同步轮(11)之间相连,所述滑槽(10)内滑动连接有所述夹持机构,所述夹持机构连接所述同步带(1101)的外壁。
3.根据权利要求2所述的一种机器人零部件喷涂装置,其特征在于:所述滑槽(10)内设有定位柱(12),所述定位柱(12)设有多组与所述同步带(1101)的内壁之间滑动连接。
4.根据权利要求2所述的一种机器人零部件喷涂装置,其特征在于:所述夹持机构包括移动块(14)、凹槽(15)、螺杆(16)、夹板(17),所述移动块(14)滑动连接在所述滑槽(10)内、且所述移动块(14)的切面为“工”字形,所述移动块(14)的向外端设有所述凹槽(15),所述凹槽(15)内转动连接有所述螺杆(16),所述螺杆(16)上设有两段旋向相反的螺纹端,所述螺杆(16)上螺纹连接有所述夹板(17),所述夹板(17)共两组。
5.根据权利要求1所述的一种机器人零部件喷涂装置,其特征在于:所述底座(1)的顶面设有防护外壳(18),所述防护外壳(18)为透明材质、且正面铰接有两扇门。
6.根据权利要求5所述的一种机器人零部件喷涂装置,其特征在于:所述旋转机构包括底块(19)、二号空腔(20)、旋转电机(21)、底板(22)、支撑件(23)、旋转板(24)、支撑柱(25),所述底块(19)内设有所述二号空腔(20),所述二号空腔(20)内设有所述旋转电机(21),所述底板(22)设在所述底块(19)的顶面,所述底板(22)的上方设有所述旋转板(24),所述底板(22)与所述旋转板(24)之间通过所述支撑件(23)相连,所述旋转板(24)与所述支撑件(23)之间转动连接,所述旋转电机(21)的驱动轴穿过所述底板(22)连接所述旋转板(24),所述旋转板(24)的顶面设有插孔,所述插孔内可拆卸连接有所述支撑柱(25)。
7.根据权利要求6所述的一种机器人零部件喷涂装置,其特征在于:所述支撑柱(25)有三种分别为长、中、短,所述长为20cm,所述中为15cm,所述短为10cm。
技术总结
本发明公开了一种机器人零部件喷涂装置,涉及机器人生产设备技术领域,旨在解决现有的机器人喷涂装置,在对机器人零件进行喷涂的过程中,角度单一,无法对零件进行多方位的进行喷涂调节;通过一号空腔内的驱动电机、驱动齿轮与环槽内的环形齿轮之间相互配合,带动调节块整体进行旋转,从而在通过调节块内的夹持机构、同步带、调节电机、同步轮之间的配合控制夹持机构所处的位置,从而对处于旋转机构上的机器人零部件,进行多角度多方位的喷涂作业,防止因为零部件的多样性导致,在喷涂作业过程中,造成喷涂不均、漏喷、遗喷,通过本技术方案的多角度全方位的旋转配合,使得整个喷涂作业省时省力,调高了工作效率。
技术研发人员:王志坚,励明月,王履洲
受保护的技术使用者:河北顺时智能机器人科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!