自动部分收集器的制作方法
1.本实用新型涉及实验器械技术领域,尤其是自动部分收集器。
背景技术:
2.化学实验或测试的处理过程中,需要把分离出的流质装入试管内进行分装,如果分离的量较大,则人工方式需要较大的工作量,需要有自动化的方式来提升效率。
技术实现要素:
3.本实用新型提出自动部分收集器,可以自动化地把化学实验或测试时的分离流质分装到多个试管。
4.本实用新型采用以下技术方案。
5.自动部分收集器,用于收集化学处理过程中的流质组分,其特征在于:所述收集器包括控制模块、蠕动泵、翻斗分装组件、光电传感器组件和收集容器阵列;所述蠕动泵的输入端与外部容器的组分输出端相接;所述收集容器阵列内有多个置于转盘上的收集容器;所述蠕动泵、转盘均与光电传感器组件相连,光电传感器组件与控制模块相连;所述翻斗分装组件包括翻斗、配重部以及连接翻斗、配重部的连杆;所述连杆中段铰接于支架处,当翻斗空置时,翻斗上摆至与蠕动泵输出端下方紧邻以接收蠕动泵输出的流质,配重部下摆触发光电传感器组件,使转盘转动把空的收集容器移至收集位;当翻斗内部接收的流质的重量达到阈值时,翻斗下摆至翻斗低位后向收集容器倾倒翻斗内的流质,配重部上摆触发光电传感器组件,使蠕动泵停止输出。
6.所述光电传感器组件包括在配重部向上摆动路径上顺序设置的第一光电传感器、第二光电传感器;
7.当配重部摆动时先后触发第一光电传感器、第二光电传感器,控制模块判定配重部上摆,控制模块使蠕动泵停止输出,转盘停止转动;
8.当配重部摆动时先后触发第二光电传感器、第一光电传感器,控制模块判定配重部下摆,控制模块使蠕动泵延时预设时长后,开始输出流质,同时使转盘转动把转盘上空的收集容器移至收集位;所述收集位与翻斗下摆终点紧邻。
9.所述蠕动泵延时预设时长,为翻斗上摆至终点所需时长。
10.所述配重部为可拆卸结构,配重部的重量可调整。
11.所述连杆中段铰接于支架顶部处;连杆为直杆;连杆铰接点与翻斗的间距a远大于连杆铰接点与配重部之间的间距b。
12.所述收集容器为试管。
13.所述支架可沿转盘径向移动,当转盘上以多环方式设置多层试管时,支架沿转盘径向移动,以使翻斗向不同层的试管倾倒流质。
14.本实用新型能通过翻斗的摆动动作,自动把分离流质向多根试管分装,从而提升了分装效率,节约了人力成本。
15.本实用新型中,采用配重部向上摆动路径上顺序设置的第一光电传感器、第二光电传感器来判定翻斗的摆动动作,属于非接触的检测方式,避免了接触式测量对分装重量的干扰,有利于提升分装精度。
16.本实用新型中,翻斗、配重部以及连接翻斗、配重部的连杆按翘翘板的方式铰接在支架上,配重部的重量可调整,且连杆铰接点与翻斗的间距a远小于连杆铰接点与配重部之间的间距b,通过杠杆原理,可以更为精密地调整配重部重量,以精密地调整向各个试管内分装的流质重量。
附图说明
17.下面结合附图和具体实施方式对本实用新型进一步详细的说明:
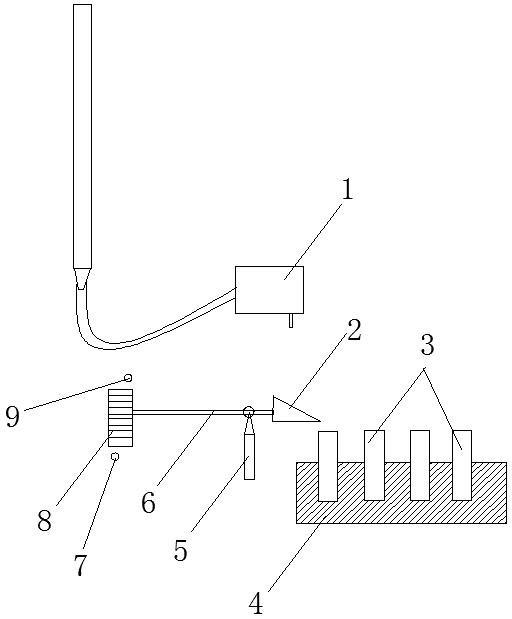
18.附图1是本实用新型的示意图;
19.附图2是转盘的俯视向示意图;
20.图中:1-蠕动泵;2-翻斗;3-收集容器;4-转盘;5-支架;6-连杆;7-第一光电传感器;8-配重部;9-第二光电传感器。
具体实施方式
21.如图所示,自动部分收集器,用于收集化学处理过程中的流质组分,其特征在于:所述收集器包括控制模块、蠕动泵1、翻斗分装组件、光电传感器组件和收集容器阵列;所述蠕动泵的输入端与外部容器的组分输出端相接;所述收集容器阵列内有多个置于转盘4上的收集容器3;所述蠕动泵、转盘均与光电传感器组件相连,光电传感器组件与控制模块相连;所述翻斗分装组件包括翻斗2、配重部8以及连接翻斗、配重部的连杆6;所述连杆中段铰接于支架5处,当翻斗空置时,翻斗上摆至与蠕动泵输出端下方紧邻以接收蠕动泵输出的流质,配重部下摆触发光电传感器组件,使转盘转动把空的收集容器移至收集位;当翻斗内部接收的流质的重量达到阈值时,翻斗下摆至翻斗低位后向收集容器倾倒翻斗内的流质,配重部上摆触发光电传感器组件,使蠕动泵停止输出。
22.所述光电传感器组件包括在配重部向上摆动路径上顺序设置的第一光电传感器7、第二光电传感器9;
23.当配重部摆动时先后触发第一光电传感器、第二光电传感器,控制模块判定配重部上摆,控制模块使蠕动泵停止输出,转盘停止转动;
24.当配重部摆动时先后触发第二光电传感器、第一光电传感器,控制模块判定配重部下摆,控制模块使蠕动泵延时预设时长后,开始输出流质,同时使转盘转动把转盘上空的收集容器移至收集位;所述收集位与翻斗下摆终点紧邻。
25.所述蠕动泵延时预设时长,为翻斗上摆至终点所需时长。
26.所述配重部为可拆卸结构,配重部的重量可调整。
27.所述连杆中段铰接于支架顶部处;连杆为直杆;连杆铰接点与翻斗的间距a远大于连杆铰接点与配重部之间的间距b。
28.所述收集容器为试管。
29.所述支架可沿转盘径向移动,当转盘上以多环方式设置多层试管时,支架沿转盘径向移动,以使翻斗向不同层的试管倾倒流质。
30.本例中,化学处理过程为以分离管对蛋白质流质中的有害物体进行去除,处理后的蛋白质流质进入蠕动泵后,经翻斗分装组件分装至转盘上的试管内。
31.本例中,配重部内设有多个配重块,如需调整试管内的蛋白质分装量,可通过改变配重部内的配重块来进行。
32.本例中,控制模块包括微处理器(mcu)。
技术特征:
1.自动部分收集器,用于收集化学处理过程中的流质组分,其特征在于:所述收集器包括控制模块、蠕动泵、翻斗分装组件、光电传感器组件和收集容器阵列;所述蠕动泵的输入端与外部容器的组分输出端相接;所述收集容器阵列内有多个置于转盘上的收集容器;所述蠕动泵、转盘均与光电传感器组件相连,光电传感器组件与控制模块相连;所述翻斗分装组件包括翻斗、配重部以及连接翻斗、配重部的连杆;所述连杆中段铰接于支架处,当翻斗空置时,翻斗上摆至与蠕动泵输出端下方紧邻以接收蠕动泵输出的流质,配重部下摆触发光电传感器组件,使转盘转动把空的收集容器移至收集位;当翻斗内部接收的流质的重量达到阈值时,翻斗下摆至翻斗低位后向收集容器倾倒翻斗内的流质,配重部上摆触发光电传感器组件,使蠕动泵停止输出。2.根据权利要求1所述的自动部分收集器,其特征在于:所述光电传感器组件包括在配重部向上摆动路径上顺序设置的第一光电传感器、第二光电传感器;当配重部摆动时先后触发第一光电传感器、第二光电传感器,控制模块判定配重部上摆,控制模块使蠕动泵停止输出,转盘停止转动;当配重部摆动时先后触发第二光电传感器、第一光电传感器,控制模块判定配重部下摆,控制模块使蠕动泵延时预设时长后,开始输出流质,同时使转盘转动把转盘上空的收集容器移至收集位;所述收集位与翻斗下摆终点紧邻。3.根据权利要求2所述的自动部分收集器,其特征在于:所述蠕动泵延时预设时长,为翻斗上摆至终点所需时长。4.根据权利要求1所述的自动部分收集器,其特征在于:所述配重部为可拆卸结构,配重部的重量可调整。5.根据权利要求4所述的自动部分收集器,其特征在于:所述连杆中段铰接于支架顶部处;连杆为直杆;连杆铰接点与翻斗的间距a远大于连杆铰接点与配重部之间的间距b。6.根据权利要求1所述的自动部分收集器,其特征在于:所述收集容器为试管。7.根据权利要求6所述的自动部分收集器,其特征在于:所述支架可沿转盘径向移动,当转盘上以多环方式设置多层试管时,支架沿转盘径向移动,以使翻斗向不同层的试管倾倒流质。
技术总结
本实用新型提出自动部分收集器,包括控制模块、蠕动泵、翻斗分装组件、光电传感器组件和收集容器阵列;收集容器阵列内有多个置于转盘上的收集容器;光电传感器组件与控制模块相连;所述翻斗分装组件包括翻斗、配重部以及连接翻斗、配重部的连杆;所述连杆中段铰接于支架处,当翻斗空置时,翻斗上摆至与蠕动泵输出端下方紧邻以接收蠕动泵输出的流质,配重部下摆触发光电传感器组件,使转盘转动把空的收集容器移至收集位;当翻斗内部接收的流质的重量达到阈值时,翻斗下摆至翻斗低位后向收集容器倾倒翻斗内的流质,配重部上摆触发光电传感器组件,使蠕动泵停止输出;本实用新型可以自动化地把化学实验或测试时的分离流质分装到多个试管。个试管。个试管。
技术研发人员:丁友玲 陈婷 林金海
受保护的技术使用者:福州新北生化工业有限公司
技术研发日:2022.05.31
技术公布日:2023/1/3
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1