涂装机器人的制作方法
本发明涉及涂装机器人。
背景技术:
1、汽车等车辆的涂装生产线中,使用机器人的机器人涂装为主流。作为与该机器人涂装相关的结构的一例,例如,在专利文献1中公开了以下的结构。即,在专利文献1公开的涂装机器人中,在机械臂(100)的前端侧安装循环装置(200)。该循环装置(200)内设有第1比例控制阀(204)和第2比例控制阀(205),还设有多个压力传感器(208~211),进一步设有流量计(212)。并且,在循环装置(200)的姿态发生了变化的情况下,与将流量设为定值或将差压设为定值的控制模式相应地,通过控制第1比例控制阀(204)及第2比例控制阀(205)的开度,调整供给压力和回收压力,由此,实现与上述控制模式相应的控制。
2、现有技术文献
3、专利文献
4、专利文献1:wo2021/040034号公报
技术实现思路
1、发明要解决的课题
2、此外,在专利文献1公开的结构中,能够减少安装于机械臂的前端侧的循环装置(200)内的水头压差的影响。但是,在专利文献1中,对于搭载于机械臂侧的循环装置没有任何提及。因此,在搭载于机械臂侧的循环装置与安装于机械臂的前端的喷头之间产生了水头压差的情况下,对于如何减少由水头压差带来的影响而进行稳定的涂装并不明确。
3、另外,在专利文献1中,如果第1比例控制阀(204)、第2比例控制阀(205)全开或全闭,则存在无法进行压力调整的问题。
4、另外,在机械臂的前端侧安装有循环装置的结构中,难以提高机器人涂装中的运动性能。
5、本发明基于上述情况而完成,目的在于提供一种能够实现下述至少一项的涂装机器人:(1)提升涂装时的运动性能;(2)减少搭载于机械臂侧的循环装置与安装于机械臂的前端的喷头之间的由水头压差带来的影响,进行稳定的涂装;(3)防止发生无法由第1调整阀和第2调整阀进行压力调整的状态。
6、用于解决课题的手段
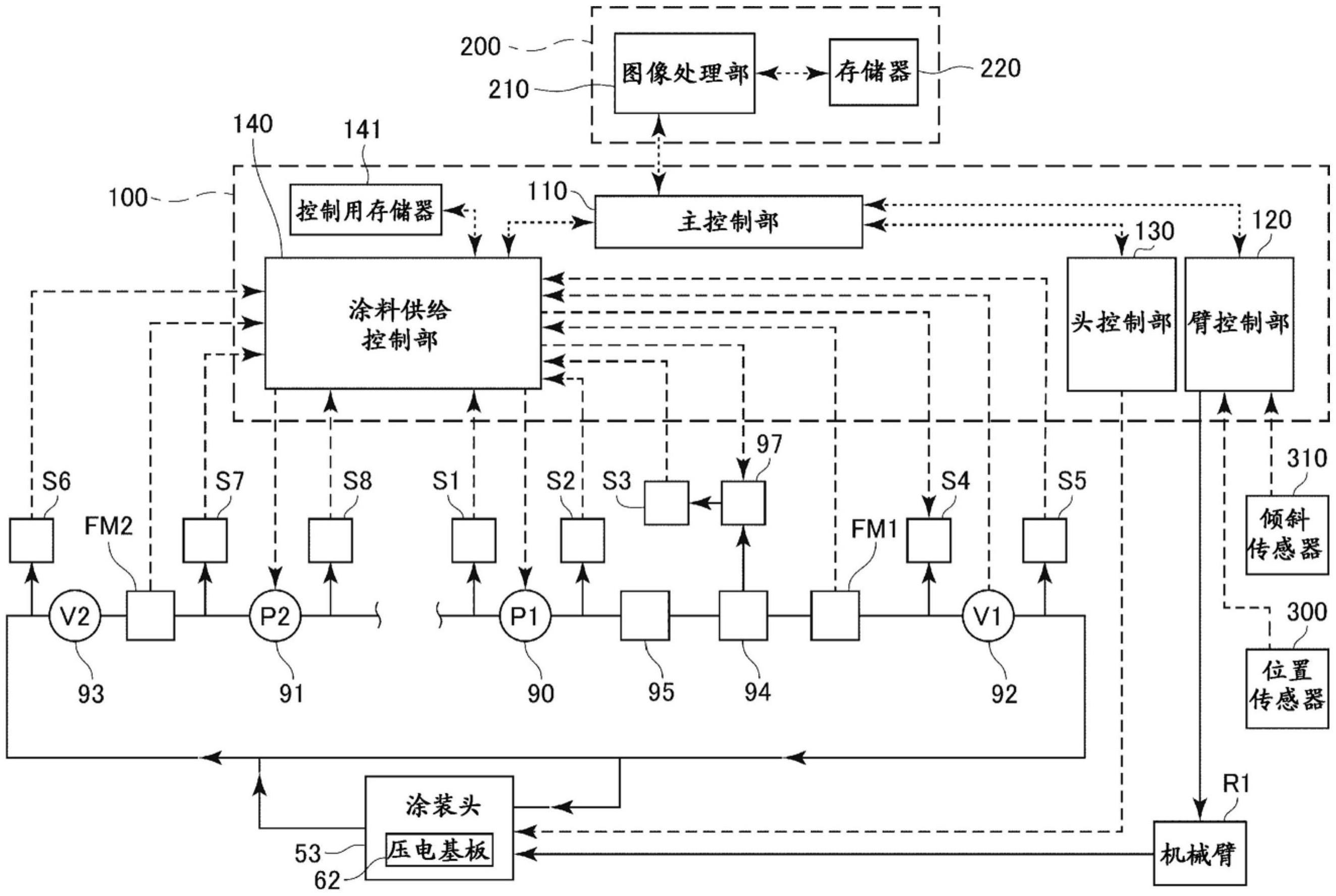
7、为了解决上述课题,根据本发明的第1观点,提供一种涂装机器人,其进行涂装对象物的涂装,其特征在于,具备:涂装头单元,该涂装头单元具备涂装头,该涂装头具备喷出液滴的多个喷嘴和用于通过驱动而从喷嘴压出液滴的压电基板;机械臂,涂装头单元安装于该机械臂的前端,并且该机械臂使该涂装头单元向期望位置移动;涂料供给机构,该涂料供给机构横跨设置于机械臂与涂装头单元之间;和控制部,该控制部控制机械臂的驱动及涂料供给机构的驱动,涂料供给机构具备:涂料供给路,该涂料供给路向涂装头供给涂料;返回流路,该返回流路连接于涂装头的涂料排出侧,回收未从喷嘴喷出的涂料;涂料供给单元,该涂料供给单元搭载于机械臂的规定位置,设置于涂料供给路的中途,并且基于控制部的控制施加用于向涂装头供给涂料的压力;涂料回收单元,该涂料回收单元搭载于机械臂的规定位置,设置于返回流路的中途,并且基于控制部的控制向返回流路的下游侧施加用于回收未从涂装头喷出的涂料的压力;第1调整阀,该第1调整阀设置于涂装头单元,设置于比涂料供给单元靠涂料供给路的下游侧处,并且基于控制部的控制调整通向涂装头的涂料的压力;和第2调整阀,该第2调整阀设置于涂装头单元,设置于比涂料回收单元靠返回流路的上游侧处,并且基于控制部的控制调整从涂装头回收的涂料的压力,控制部具备:控制用存储器,该控制用存储器存储有压力设定值;和涂料供给控制部,该涂料供给控制部对涂料供给单元、涂料回收单元、第1调整阀及第2调整阀中的至少一个的动作执行控制,以成为从控制用存储器读出的压力设定值,在利用涂料供给控制部控制涂料的压力以使得成为压力设定值时,一边在具有规定的调整余量的范围内调整第1调整阀及第2调整阀的开度,一边控制涂料供给单元及涂料回收单元中的至少一个的动作。
8、另外,在上述的发明中,优选地,具备:第1压力传感器,该第1压力传感器至少在比涂料供给单元靠涂料供给路的下游侧处检测从涂料供给单元喷出的涂料的压力;第2压力传感器,该第2压力传感器至少在比第1调整阀靠涂料供给路的下游侧处检测通过第1调整阀后的涂料的压力;第3压力传感器,该第3压力传感器至少在比第2调整阀靠返回流路的下游侧处检测从第2调整阀喷出的涂料的压力;和第4压力传感器,该第4压力传感器至少在比涂料回收单元靠返回流路的下游侧处检测从涂料回收单元喷出的涂料的压力,涂料供给控制部基于第1压力传感器、第2压力传感器、第3压力传感器及第4压力传感器中的至少一个的检测结果,对涂料供给单元、涂料回收单元、第1调整阀及第2调整阀中的至少一个的动作执行控制,以使得涂料的压力成为以压力设定值设定的压力。
9、另外,在上述的发明中,优选地,控制用存储器中存储有控制表,控制表具有针对多个控制条件的每一个设定的多个压力设定值,控制表中分别对涂料供给单元、涂料回收单元、第1调整阀及第2调整阀设有多个压力设定值。
10、另外,在上述的发明中,优选地,涂装头上安装有检测该涂装头的倾斜角度的角度检测单元,控制表中设有针对涂装头的每个倾斜角度的压力设定值,涂料供给控制部基于由角度检测单元检测出的涂装头的倾斜角度,从控制表中选定与该倾斜角度对应的压力设定值,涂料供给控制部基于选定的压力设定值,对涂料供给单元、涂料回收单元、第1调整阀及第2调整阀中的至少一个的动作执行控制。
11、另外,在上述的发明中,优选地,控制表中设有针对机械臂的每个座标数据的压力设定值,涂料供给控制部基于机械臂的当前的座标位置,从控制表中选定与该座标位置对应的压力设定值,涂料供给控制部基于选定的压力设定值对涂料供给单元、涂料回收单元、第1调整阀及第2调整阀的至少一个的动作执行控制。
12、发明效果
13、通过本发明,能够提供一种涂装机器人,其能够减少搭载于机械臂侧的循环装置与安装于机械臂的前端的喷头之间的由水头压差带来的影响而进行稳定的车辆涂装。
技术特征:
1.一种涂装机器人,其进行涂装对象物的涂装,其特征在于,具备:
2.根据权利要求1所述的涂装机器人,其特征在于,具备:
3.根据权利要求2所述的涂装机器人,其特征在于,
4.根据权利要求3所述的涂装机器人,其特征在于,
5.根据权利要求3所述的涂装机器人,其特征在于,
技术总结
本发明提供一种能够实现提高运动性能、减少水头压差带来的影响、防止发生无法由第1调整阀和第2调整阀进行压力调整的状态中的至少一个的涂装机器人。涂装机器人具备将涂装头单元安装于前端的机械臂、在机械臂与涂装头单元之间横跨设置的涂料供给机构、和控制部,控制部具备对涂料供给单元、涂料回收单元、第1调整阀及第2调整阀中的至少一个的动作执行控制以使得成为从控制用存储器读出的压力设定值的涂料供给控制部,在利用涂料供给控制部控制涂料的压力以使得成为压力设定值时,一边在具有规定的调整余量的范围内调整第1调整阀及第2调整阀的开度,一边控制涂料供给单元及涂料回收单元中的至少一个的动作。
技术研发人员:饭田辉澄,多和田孝达,梅泽德夫
受保护的技术使用者:ABB瑞士股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!