钻井液振动筛控制方法、装置、系统、设备及存储介质与流程
本发明涉及钻井液振动筛控制,特别是涉及一种钻井液振动筛控制方法、装置、系统、设备及存储介质。
背景技术:
1、石油勘探和地质钻探中最常见的钻井液振动筛有直线振动筛和平动椭圆振动筛,但这两种振动筛均只有一种运动轨迹;近年来出现的双轨迹振动筛,虽具有直线和平动椭圆两种运动轨迹,但需现场专业技术人员根据固液分离效果并结合经验,人工选择并切换直线或平动椭圆运动轨迹;同时上述三种类型振动筛的激振电机转速不可自动调节,激振力和筛面倾角需在停机状态下根据现场经验调节,筛网一般采用60目-100目,少数现场采用150目-200目。在进行固液分离过程中均存在如下问题:(1)跑冒漏、钻井液资源浪费严重,对环境影响比较大,无法满足现场qhse要求;(2)使用200目以上细目筛网时,“糊筛、堵筛”严重、寿命短,分离效果差;(3)处理后的钻屑含液率偏高,增加后期运输与无害化处理成本;(4)运动轨迹依靠经验、激振电机转速不可调、激振力和筛面倾角需停机后人工进行调节;(5)人工检测钻井液性能和巡检振动筛工作状态、现场劳动强度高、自动化程度低。
2、综上所述,现有技术无法有针对性对钻井液进行固相控制,也不能更好适应不同地层、不同钻进过程与全井段固相控制需求,达不到最佳分离效果,处理效能与自动化程度低、劳动强度高;原材料浪费和环境污染比较严重,无法满足碳中和目标下减污降碳与节能环保要求。
技术实现思路
1、本发明的目的是提供一种钻井液振动筛控制方法、装置、系统、设备及存储介质,实现了钻井液振动筛的自动控制,提高了固液分离的能力。
2、为实现上述目的,本发明提供了如下方案:
3、一种钻井液振动筛控制方法,所述方法包括:
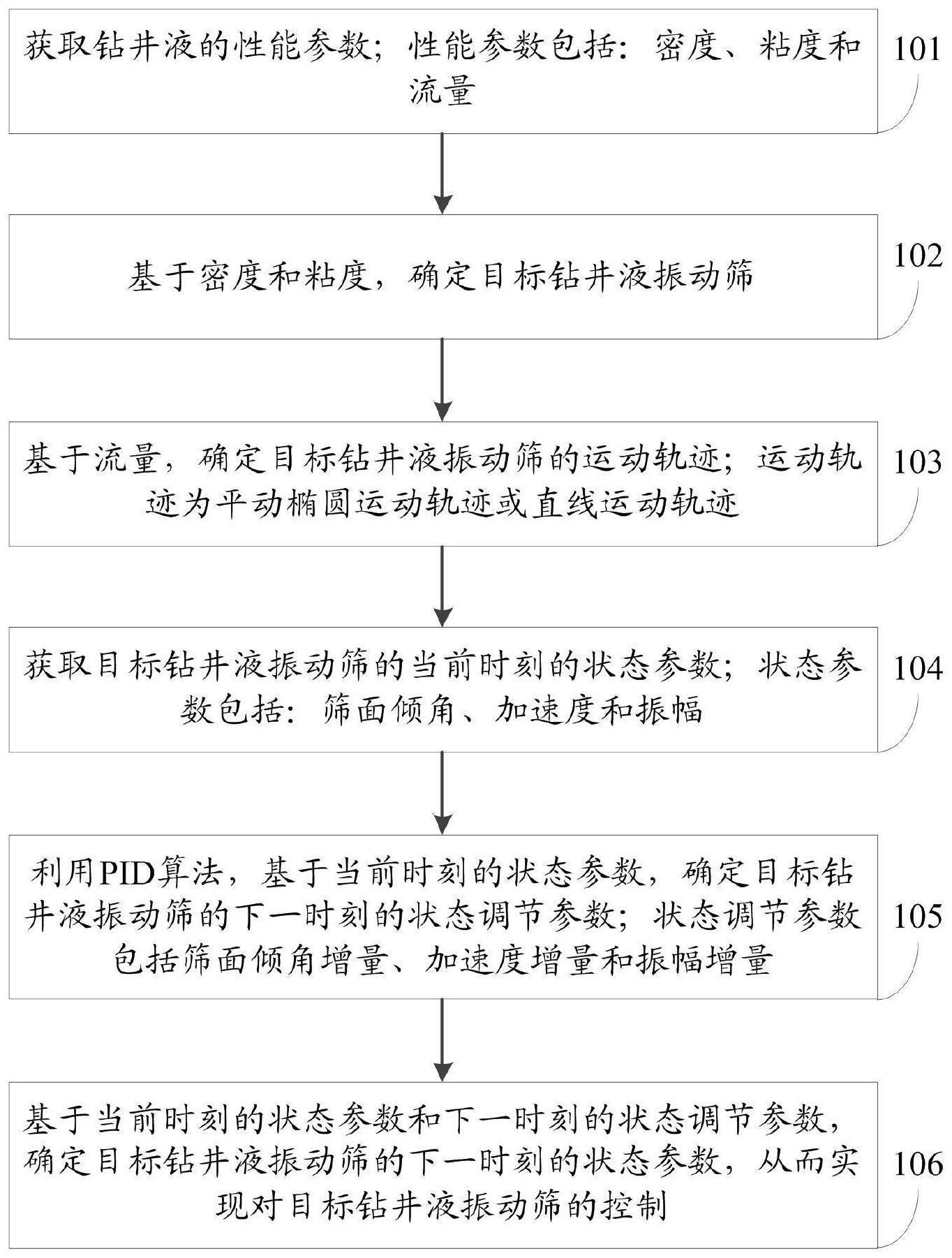
4、获取钻井液的性能参数;所述性能参数包括:密度、粘度和流量;
5、基于所述密度和所述粘度,确定目标钻井液振动筛;
6、基于所述流量,确定所述目标钻井液振动筛的运动轨迹;所述运动轨迹为平动椭圆运动轨迹或直线运动轨迹;
7、获取所述目标钻井液振动筛的当前时刻的状态参数;所述状态参数包括:筛面倾角、加速度和振幅;
8、利用pid算法,基于当前时刻的状态参数,确定所述目标钻井液振动筛的下一时刻的状态调节参数;所述状态调节参数包括筛面倾角增量、加速度增量和振幅增量;
9、基于当前时刻的状态参数和下一时刻的状态调节参数,确定所述目标钻井液振动筛的下一时刻的状态参数,从而实现对所述目标钻井液振动筛的控制。
10、可选地,基于所述流量,确定所述目标钻井液振动筛的运动轨迹,包括:
11、判断所述流量是否大于预设流量;
12、若是,则确定所述平动椭圆运动轨迹为所述钻井液振动筛的运动轨迹;
13、若否,则确定所述直线运动轨迹为所述钻井液振动筛的运动轨迹。
14、一种钻井液振动筛控制装置,所述装置包括:密度传感器、粘度传感器、流量传感器、筛面倾角传感器、加速度传感器、振幅传感器和控制器;所述密度传感器、所述粘度传感器、所述流量传感器、所述筛面倾角传感器、所述加速度传感器和所述振幅传感器均与所述控制器连接,所述筛面倾角传感器、所述加速度传感器、所述振幅传感器和所述控制器均与目标钻井液振动筛连接;
15、所述密度传感器用于获取钻井液的密度;
16、所述粘度传感器用于获取所述钻井液的粘度;
17、所述流量传感器用于获取所述钻井液的流量;
18、所述控制器,用于:
19、基于所述密度和所述粘度,确定目标钻井液振动筛;
20、基于所述流量,确定所述目标钻井液振动筛的运动轨迹;所述运动轨迹为平动椭圆运动轨迹或直线运动轨迹;
21、所述筛面倾角传感器用于获取所述目标钻井液振动筛的筛面倾角;
22、所述加速度传感器用于获取所述目标钻井液振动筛的加速度;
23、所述振幅传感器用于获取所述目标钻井液振动筛的振幅;
24、所述控制器,还用于:
25、利用pid算法,基于当前时刻的状态参数,确定所述目标钻井液振动筛的下一时刻的状态调节参数;所述状态调节参数包括筛面倾角增量、加速度增量和振幅增量;
26、基于当前时刻的状态参数和下一时刻的状态调节参数,确定所述目标钻井液振动筛的下一时刻的状态参数,控制所述目标钻井液振动筛。
27、一种钻井液振动筛控制系统,所述系统包括:
28、性能参数确定模块,用于获取钻井液的性能参数;所述性能参数包括:密度、粘度和流量;
29、目标钻井液振动筛确定模块,用于基于所述密度和所述粘度,确定目标钻井液振动筛;
30、运动轨迹确定模块,用于基于所述流量,确定所述目标钻井液振动筛的运动轨迹;所述运动轨迹为平动椭圆运动轨迹或直线运动轨迹;
31、当前时刻状态参数确定模块,用于获取所述目标钻井液振动筛的当前时刻的状态参数;所述状态参数包括:筛面倾角、加速度和振幅;
32、状态调节参数确定模块,用于利用pid算法,基于当前时刻的状态参数,确定所述目标钻井液振动筛的下一时刻的状态调节参数;所述状态调节参数包括筛面倾角增量、加速度增量和振幅增量;
33、控制模块,用于基于当前时刻的状态参数和下一时刻的状态调节参数,确定所述目标钻井液振动筛的下一时刻的状态参数,从而实现对所述目标钻井液振动筛的控制。
34、一种设备,包括:
35、一个或多个处理器;
36、存储装置,其上存储有一个或多个程序;
37、当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现如上述所述的钻井液振动筛控制方法。
38、一种存储介质,其上存储有计算机程序,其中,所述计算机程序被处理器执行时实现如上述所述的钻井液振动筛控制方法。
39、根据本发明提供的具体实施例,本发明公开了以下技术效果:
40、本发明公开了一种钻井液振动筛控制方法、装置、系统、设备及存储介质,首先基于钻井液的密度、粘度和流量确定目标钻井液振动筛及其运动轨迹;然后目标钻井液振动筛的当前时刻的状态参数;,利用pid算法,基于当前时刻的状态参数,确定目标钻井液振动筛的下一时刻的状态调节参数,实现对目标钻井液振动筛的控制,实现了钻井液振动筛的自动控制,提高了固液分离的能力。
技术特征:
1.一种钻井液振动筛控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的钻井液振动筛控制方法,其特征在于,基于所述流量,确定所述目标钻井液振动筛的运动轨迹,包括:
3.一种钻井液振动筛控制装置,其特征在于,所述装置包括:密度传感器、粘度传感器、流量传感器、筛面倾角传感器、加速度传感器、振幅传感器和控制器;所述密度传感器、所述粘度传感器、所述流量传感器、所述筛面倾角传感器、所述加速度传感器和所述振幅传感器均与所述控制器连接,所述筛面倾角传感器、所述加速度传感器、所述振幅传感器和所述控制器均与目标钻井液振动筛连接;
4.一种钻井液振动筛控制系统,其特征在于,所述系统包括:
5.一种设备,其特征在于,包括:
6.一种存储介质,其特征在于,其上存储有计算机程序,其中,所述计算机程序被处理器执行时实现如权利要求1至2中任意一项所述的钻井液振动筛控制方法。
技术总结
本发明公开一种钻井液振动筛控制方法、装置、系统、设备及存储介质,涉及钻井液振动筛控制技术领域,所述方法包括:获取钻井液的密度、粘度和流量;基于密度和粘度确定目标钻井液振动筛;基于流量确定目标钻井液振动筛的运动轨迹;获取目标钻井液振动筛的当前时刻的状态参数;状态参数包括:筛面倾角、加速度和振幅;利用PID算法,基于当前时刻的状态参数,确定目标钻井液振动筛的下一时刻的状态调节参数;基于当前时刻的状态参数和下一时刻的状态调节参数,确定目标钻井液振动筛的下一时刻的状态参数,从而实现对目标钻井液振动筛的控制。本发明实现了钻井液振动筛的自动控制,提高了固液分离的能力。
技术研发人员:冯美贵,翁炜,蒋睿,吴烁,徐军军,郭强,赵志涛,贺云超,欧阳志勇,杨鹏,张德龙,张培丰
受保护的技术使用者:北京探矿工程研究所
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!