一种无人机喷涂的喷涂量控制方法及装置与流程
本发明涉及无人机喷涂,具体为一种无人机喷涂的喷涂量控制方法及装置。
背景技术:
1、无人机是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,在民用中起到了不可必少的作用,现有技术中能够利用无人机实现物品搬运、高空监视、喷水、喷涂等工作,现有技术中采用无人机喷涂装置代替人工作业,对高空中需要进行的一些喷涂工作进行自动化处理,但现有技术中的无人机喷涂装置在使用过程中其喷头始终保持与墙面正对,使喷头能够完成对整个墙面的喷涂。
2、无人机喷涂所用的水箱上自带气泵组件对内部液体进行挤压,挤压的气体通过长杆挤压至喷头处从喷口对准区域进行喷涂,但是由于高空作业的特殊性,无人机在喷涂期间其喷涂量无法控制,现有的无人机在喷射期间其喷涂量是固定的,喷涂的控制量一般受喷口的面积和气泵的压力影响,最简单的是控制喷口的面积来调节喷涂量,但是当喷出面积改变时,其喷出的压力变化会导致喷涂的范围变化,继而需要无人机重新定位,现有的无人机在喷涂量进行调节时,喷涂范围无法不改变,鉴于此,我们提出一种无人机喷涂的喷涂量控制方法及装置。
技术实现思路
1、针对现有技术的不足,本发明提供了一种无人机喷涂的喷涂量控制方法及装置,解决了上述背景技术中提出的问题。为实现以上目的,本发明通过以下技术方案予以实现:一种无人机喷涂的喷涂量控制方法,包括以下步骤
2、步骤一:喷涂定位,将机体与伸缩管上喷座对准工作区域,计算喷涂距离并制定喷涂量;
3、步骤二:喷涂量调控,根据制定的喷涂量控制电动推杆运作,电动推杆的输出轴带动双向控制齿板对喷涂气压与喷口面积进行调节;
4、步骤三:实施喷涂,对调控喷涂量后的喷涂箱进行喷涂,启动电机带动伸缩转板上滑轴转动,滑轴转动时控制喷涂量调节装置上气压板对喷涂箱进行挤压喷射,完成喷涂量调控后的喷涂工作。
5、优选的,通过以下方法对喷涂气压调节,
6、步骤s1:双向控制齿板移动啮合齿轮,驱动齿轮转动,转动的齿轮带动双向螺纹杆转动;
7、步骤s2:双向螺纹杆转动带动两个螺座相对移动,两个螺座相对移动带动x型交叉杆伸缩运动,x型交叉杆伸缩时在滑块内转动,并驱动两个滑块进行相对运动;
8、步骤s3:滑块运动时带动气压板在气泵控制箱内进行高度调节,高度与气压成反比,实现喷涂气压的调节。
9、优选的,通过以下方法对喷口面积调节,
10、步骤a1:双向控制齿板移动时通过滑杆带动塞板在挤压箱内进行滑动,滑动产生抽吸力作用在箱内液体中;
11、步骤a2:液体抽吸的力通过连通管作用在喷涂底座中,挤压板受力进行移动;
12、步骤a3:挤压板移动期间通过连杆带动齿杆移动,齿杆移动带动喷头转动;
13、步骤a4:喷头内喷槽在转动后与喷座内喷槽产生位置交错,喷涂箱内的液体只能从两个槽相交的区域喷出,实现喷口面积的调节。
14、一种无人机喷涂的喷涂量控制装置,包括机体,所述机体上安装有喷涂箱,所述喷涂箱上连接有伸缩管,所述伸缩管上连接有喷座,所述喷涂箱上安装有气泵控制箱,所述气泵控制箱内安装有电机,所述电机上固定连接有伸缩转板,所述伸缩转板上滑动连接有滑轴,所述滑轴上设置有喷涂量调节装置,所述喷涂量调节装置上设置有气压板。
15、优选的,所述喷涂量调节装置包括有限位框、伸缩框和自动控制装置,所述限位框的表面滑动连接气泵控制箱的内壁,所述限位框的内部转动连接有双向螺纹杆,所述双向螺纹杆的表面螺纹连接有螺座,所述螺座上转动连接有x型交叉杆,所述x型交叉杆的底端转动连接有滑块。
16、优选的,所述伸缩框的内部滑动连接滑轴的表面,且伸缩框的底部固定连接气压板的表面,所述螺座的表面滑动连接限位框的内壁,所述滑块的底部滑动连接气压板的顶部。
17、优选的,所述自动控制装置包括有电动推杆和喷口同步调节装置,所述电动推杆的表面安装在气泵控制箱的内部,所述电动推杆上固定连接有双向控制齿板,所述双向控制齿板的表面啮合有齿轮,所述双向控制齿板上固定连接有滑杆,所述滑杆上固定连接有塞板,所述塞板的表面滑动连接有挤压箱,所述齿轮固定在双向螺纹杆上,所述挤压箱固定在气泵控制箱内。
18、优选的,所述喷口同步调节装置包括有连通管,所述连通管的一端固定连接挤压箱上,所述连通管的另一端固定连接有喷涂底座,所述喷涂底座的内部转动连接有喷头,所述喷头上固定连接有齿牙,所述喷头上啮合有齿杆,所述齿杆上固定连接有连杆,所述连杆上固定连接有挤压板,所述挤压板的表面滑动连接有调控箱。
19、优选的,所述喷涂底座固定在喷座上,所述喷头和喷座内均开设有喷槽,所述调控箱安装在喷涂底座内,且调控箱的表面固定连接连通管的端部。
20、有以上技术方案可见,本说明书实施例提供的一种无人机喷涂的喷涂量控制方法及装置,至少具备以下有益效果:
21、(1)、本发明通过喷涂量调节装置调节气压板上下挤压的距离,实现喷涂气压的调节,通过调节两个槽口的相交面积实现对喷射口面积进行调节的目的,气压与喷射口面积的调节成反比,以此来中和气压调节后喷涂范围,使得无人机在进行喷涂量调节喷涂时,不会影响其喷射距离的效果,避免喷射距离改变后无人机再次定位的问题。
22、(2)、本发明通过调节气压板的高度,即调节以电机轴点转动的圆半径的效果,通过半径的变化能够实现对气压板进行不同距离的挤压工作,继而利用距离的改变实现不同气压调节的目的,通过电机带动伸缩转板上滑轴驱动限位框上气压板在气泵控制箱内上下,实现对喷涂箱内液体进行气压挤压的效果,利用气压实现无人机自动喷涂的功能。
技术特征:
1.一种无人机喷涂的喷涂量控制方法,其特征在于:包括以下步骤
2.根据权利要求1所述的一种无人机喷涂的喷涂量控制方法,其特征在于:通过以下方法对喷涂气压调节,
3.根据权利要求1所述的一种无人机喷涂的喷涂量控制方法,其特征在于:通过以下方法对喷口面积调节,
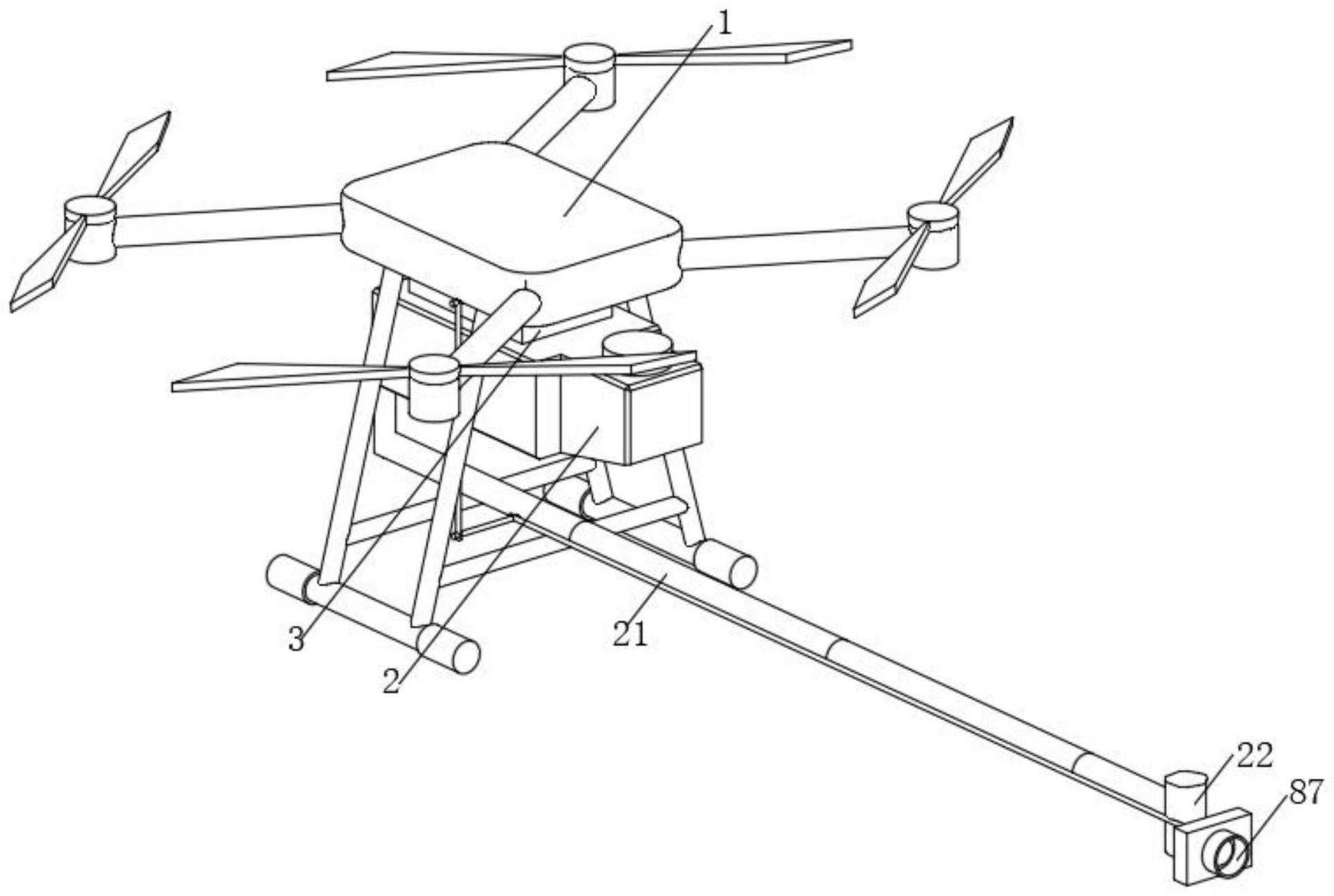
4.一种无人机喷涂的喷涂量控制装置,其特征在于:包括机体(1),所述机体(1)上安装有喷涂箱(2),所述喷涂箱(2)上连接有伸缩管(21),所述伸缩管(21)上连接有喷座(22),所述喷涂箱(2)上安装有气泵控制箱(3),所述气泵控制箱(3)内安装有电机(4),所述电机(4)上固定连接有伸缩转板(5),所述伸缩转板(5)上滑动连接有滑轴(6),所述滑轴(6)上设置有喷涂量调节装置(7),所述喷涂量调节装置(7)上设置有气压板(9)。
5.根据权利要求4所述的一种无人机喷涂的喷涂量控制装置,其特征在于:所述喷涂量调节装置(7)包括有限位框(71)、伸缩框(76)和自动控制装置(8),所述限位框(71)的表面固定连接气泵控制箱(3)的内壁,所述限位框(71)的内部转动连接有双向螺纹杆(72),所述双向螺纹杆(72)的表面螺纹连接有螺座(73),所述螺座(73)上转动连接有x型交叉杆(74),所述x型交叉杆(74)的底端转动连接有滑块(75)。
6.根据权利要求5所述的一种无人机喷涂的喷涂量控制方法及装置,其特征在于:所述伸缩框(76)的内部滑动连接滑轴(6)的表面,且伸缩框(76)的底部固定连接气压板(9)的表面,所述螺座(73)的表面滑动连接限位框(71)的内壁,所述滑块(75)的底部滑动连接气压板(9)的顶部。
7.根据权利要求5所述的一种无人机喷涂的喷涂量控制装置,其特征在于:所述自动控制装置(8)包括有电动推杆(81)和喷口同步调节装置(87),所述电动推杆(81)的表面安装在气泵控制箱(3)的内部,所述电动推杆(81)上固定连接有双向控制齿板(82),所述双向控制齿板(82)的表面啮合有齿轮(83),所述双向控制齿板(82)上固定连接有滑杆(84),所述滑杆(84)上固定连接有塞板(85),所述塞板(85)的表面滑动连接有挤压箱(86),所述齿轮(83)固定在双向螺纹杆(72)上,所述挤压箱(86)固定在气泵控制箱(3)内。
8.根据权利要求7所述的一种无人机喷涂的喷涂量控制装置,其特征在于:所述喷口同步调节装置(87)包括有连通管(871),所述连通管(871)的一端固定连接挤压箱(86)上,所述连通管(871)的另一端固定连接有喷涂底座(872),所述喷涂底座(872)的内部转动连接有喷头(873),所述喷头(873)上固定连接有齿牙,所述喷头(873)上啮合有齿杆(874),所述齿杆(874)上固定连接有连杆(875),所述连杆(875)上固定连接有挤压板(876),所述挤压板(876)的表面滑动连接有调控箱(877)。
9.根据权利要求8所述的一种无人机喷涂的喷涂量控制装置,其特征在于:所述喷涂底座(872)固定在喷座(22)上,所述喷头(873)和喷座(22)内均开设有喷槽,所述调控箱(877)安装在喷涂底座(872)内,且调控箱(877)的表面固定连接连通管(871)的端部。
技术总结
本发明涉及无人机喷涂技术领域,具体为一种无人机喷涂的喷涂量控制方法及装置,包括以下步骤,步骤一:喷涂定位;步骤二:喷涂量调控,根据制定的喷涂量控制电动推杆运作,电动推杆带动双向控制齿板对喷涂气压与喷口面积调节;步骤三:实施喷涂;所述机体上安装有喷涂箱,所述喷涂箱上通过气泵控制箱设置有喷涂量调节装置。本发明通过喷涂量调节装置调节气压板上下挤压的距离,实现喷涂气压的调节,通过调节两个槽口的相交面积实现对喷射口面积进行调节的目的,气压与喷射口面积的调节成反比,以此来中和气压调节后喷涂范围,使得无人机在喷涂量调节喷涂时,不会影响其喷射距离,避免喷射距离改变后无人机再次定位的问题。
技术研发人员:熊斌,张永生,席晓强,王东林,陆杨文
受保护的技术使用者:苏州苏能集团有限公司科技分公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!