柱形支撑快速部署移动式机器人系统的制作方法
本发明涉及表面处理技术及表面处理使用设备,具体的,是一种柱形支撑快速部署移动式机器人系统。
背景技术:
1、现阶段,大型船舶夹板表面柱状体喷涂均由人工搭建脚手架,登高喷涂。
2、人工登高喷涂,处理效率低,且存在做业人员跌落脚手架的安全隐患;
3、人工登高喷涂,做业强度大,且喷涂处理成本高;
4、同时,人工进行登高喷涂,无法保证喷涂质量。
5、因此,有必要提供一种柱形支撑快速部署移动式机器人系统来解决上述问题。
技术实现思路
1、本发明的目的是提供一种柱形支撑快速部署移动式机器人系统。
2、技术方案如下:
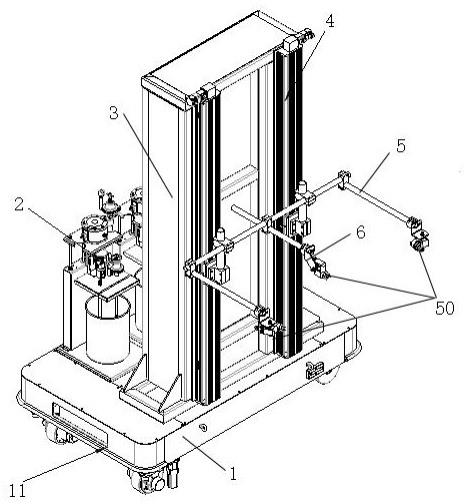
3、一种柱形支撑快速部署移动式机器人系统,包括agv小车、搭载于agv小车上的供漆模组、和喷涂模组;
4、喷涂模组包括升降架、设置于升降架上的升降直线驱动装置,连接于升降直线驱动装置的多关节支架、以及连接于多关节支架上的喷枪;
5、agv小车用做到达喷涂区的智能移载部,通过升降直线驱动装置、多关节支架进行喷枪的喷涂位置快速部署调节,形成柱形支撑快速部署移动式机器人系统结构。
6、进一步的,升降直线驱动装置数量为两个,对称设置于升降架上,形成双侧同步升降调剂节的高稳定性喷涂调节结构。
7、进一步的,多关节支架包括连接于升降直线驱动装置的载块,载块上通过基座连接有一组主连接柱,一组主连接柱端部连接有次级基座,次级基座上设置有分区连接柱,分区连接柱上设置有若干三级基座,三级基座上设置有喷枪连接柱。
8、近一步的,喷枪连接柱端部设置有连接片,喷枪通过调节螺栓组合可调节连接于连接片。
9、进一步的,多关节支架、连接片、调节螺栓组合配合形成喷枪的安装位置及安装角度快速调节结构。
10、进一步的,agv小车上搭载有激光雷达,形成可自动构建地图、自动完成轨迹规划的自动化表面处理寻路结构。
11、进一步的,agv小车包括万象底盘,形成可原地旋转的、灵活表面处理结构。
12、与现有技术相比,本发明通过柱形支撑快速部署移动式机器人系统结进行大型船舶夹板表面柱状体喷涂,保证喷涂效率和质量,减少人力资源的占用同时减少做业人员跌落的做业风险,降低表面处理成本。
技术特征:
1.一种柱形支撑快速部署移动式机器人系统,其特征在于:包括agv小车、搭载于agv小车上的供漆模组、和喷涂模组;
2.根据权利要求1所述的一种柱形支撑快速部署移动式机器人系统,其特征在于:升降直线驱动装置数量为两个,对称设置于升降架上,形成双侧同步升降调剂节的高稳定性喷涂调节结构。
3.根据权利要求2所述的一种柱形支撑快速部署移动式机器人系统,其特征在于:多关节支架包括连接于升降直线驱动装置的载块,载块上通过基座连接有一组主连接柱,一组主连接柱端部连接有次级基座,次级基座上设置有分区连接柱,分区连接柱上设置有若干三级基座,三级基座上设置有喷枪连接柱。
4.根据权利要求3所述的一种柱形支撑快速部署移动式机器人系统,其特征在于:喷枪连接柱端部设置有连接片,喷枪通过调节螺栓组合可调节连接于连接片。
5.根据权利要求4所述的一种柱形支撑快速部署移动式机器人系统,其特征在于:多关节支架、连接片、调节螺栓组合配合形成喷枪的安装位置及安装角度快速调节结构。
6.根据权利要求5所述的一种柱形支撑快速部署移动式机器人系统,其特征在于:agv小车上搭载有激光雷达,形成可自动构建地图、自动完成轨迹规划的自动化表面处理寻路结构。
7.根据权利要求6所述的一种柱形支撑快速部署移动式机器人系统,其特征在于:agv小车包括万象底盘,形成可原地旋转的、灵活表面处理结构。
技术总结
本发明柱形支撑快速部署移动式机器人系统,包括AGV小车、搭载于AGV小车上的供漆模组、和喷涂模组;喷涂模组包括升降架、设置于升降架上的升降直线驱动装置,连接于升降直线驱动装置的多关节支架、以及连接于多关节支架上的喷枪;AGV小车用做到达喷涂区的智能移载部,通过升降直线驱动装置、多关节支架进行喷枪的喷涂位置快速部署调节,形成柱形支撑快速部署移动式机器人系统结构。
技术研发人员:王丹,王玉珍
受保护的技术使用者:华东至正工业自动化(常熟)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!