一种能全自动识别不同转盘架的装置及方法与流程
本发明涉及全自动均质机,具体为一种能全自动识别不同转盘架的装置及方法。
背景技术:
1、在全自动均质机领域,针对容量不同的样品,会配备不同规格的转盘架用于全自动均质机。不同规格的转盘架,其上板、中板会有不同的孔数和孔径,与具体试管尺寸相匹配,但转盘架的直径、高度、底部形状相同,因此一台均质机能应用多款转盘架。
2、目前全自动均质机领域并没有转盘架识别功能,用户使用时需要在程序设置内手动选择使用的转盘架规格,本技术应用磁力识别装置和配套方法实现了转盘架的全自动识别。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种能全自动识别不同转盘架的装置及方法,采用磁力识别装置和配套方法实现了转盘架的全自动识别。
3、(二)技术方案
4、为实现上述目的,本发明提供如下技术方案:
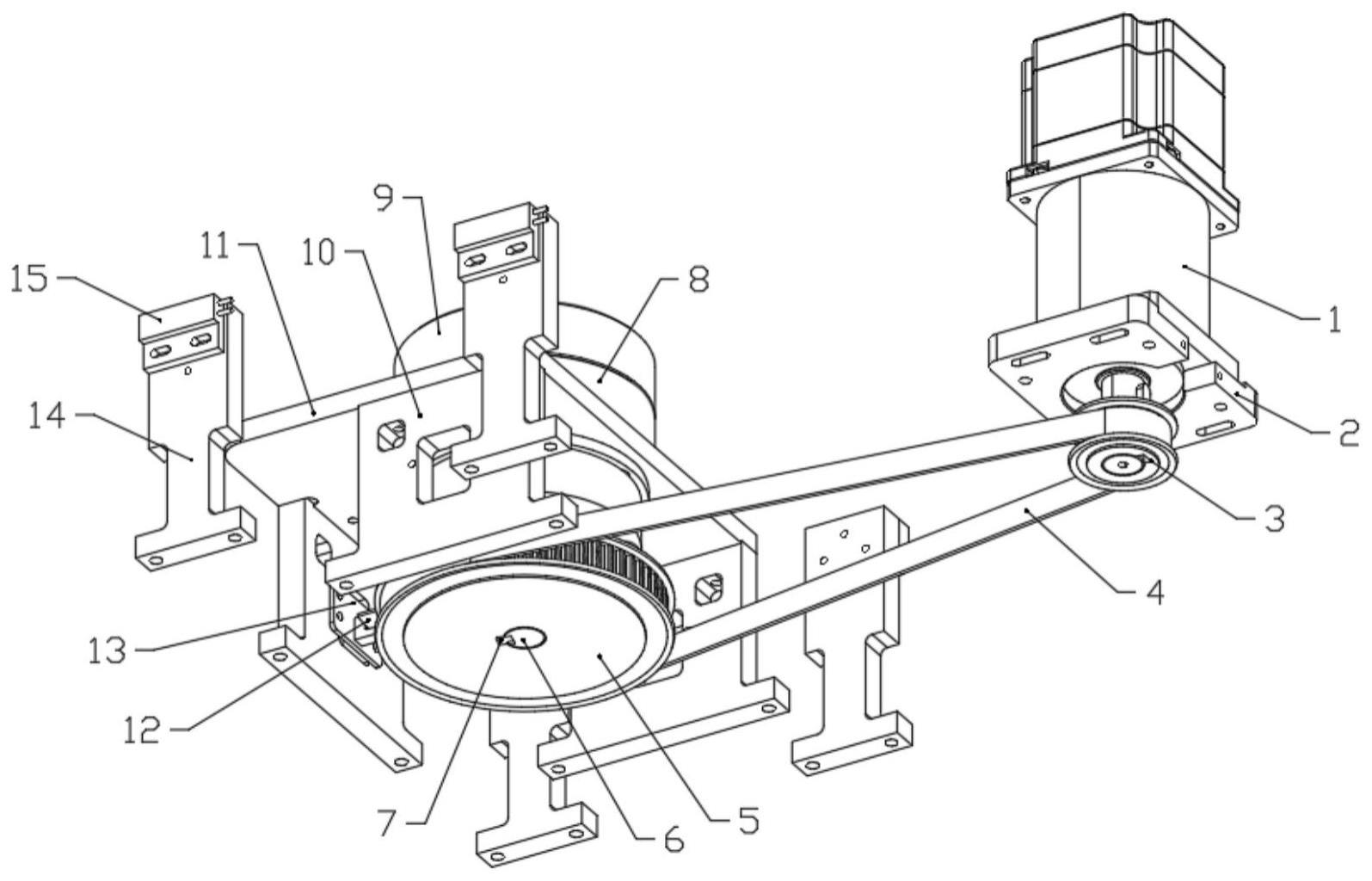
5、一种能全自动识别不同转盘架的装置,包括动力及传动组件、底座组件、检测原点组件、磁力信号识别装置和转盘架组件;
6、所述底座组件包括固定板,所述固定板的下端面三个方向上均设有支撑座,用于支撑转盘架旋转结构;所述固定板的中间设有固定底座,所述固定底座的上端设有随动支座;
7、所述动力及传动组件包括减速电机和用于支撑减速电机的电机安装板,所述减速电机的输出轴上设有主动轮,所述固定底座的下端设有旋转轴,所述旋转轴的下端部通过传动平键连接有从动轮,所述传动轮和主动轮之间通过传送带传动连接;
8、所述转盘架组件包括上板、中板和下底板,所述上板、中板和下底板之间通过连接杆螺纹连接;所述下底板呈环形状,所述中板的下端面位于下底板的环形槽内设有定位块,定位块用来和随动支座的上端连接;
9、所述检测原点组件用于检测旋转结构的原点状态;
10、所述磁力信号识别装置用于识别转盘架的磁力信号。
11、优选的,所述下底板的下方开的四个沉头孔,内可粘嵌特定规格的磁铁,分别为磁力位置a、磁力位置b、磁力位置c、磁力位置d。
12、优选的,所述磁力信号识别装置包括四个磁感底座,四个所述磁感底座均匀分布在底座组件的四周,且四个所述磁感底座上分别安装有磁力感应器a、磁力感应器b、磁力感应器c、磁力感应器d;当转盘架组件放在转盘装置的随动支座上面后,磁力位置a、磁力位置b、磁力位置c、磁力位置d分别对应在位于15-18的四个磁力感应器的正上方磁力感应器a、磁力感应器b、磁力感应器c、磁力感应器d。
13、优选的,所述检测原点组件包括触发器和传感器,所述触发器用于在当旋转结构移动到特定位置时触发传感器;所述传感器用于在当触发器到位时,反馈电信号给处理器进行运算。
14、优选的,所述随动支座上面有三个凸起形状与转盘架嵌合,用于带动转盘架旋转。
15、优选的,所述定位块的底部有三个凹槽,形状与随动支座的凸起形状一一对应,用于和随动支座的配合,实现角度约束、定位作用。
16、一种能全自动识别不同转盘架的方法,包括如下步骤:
17、步骤一:转盘架的规范处理
18、a、转盘架分类:构成转盘架的上板、中板、试管、定位块、连接杆、下底板零件中,不同规格的转盘架组件之间差异只上板、中板、试管不一样,依据不同试管的规格而匹配,下面以转盘i、ii、iii、iv代称不同规格转盘架组件;
19、b、转盘编号:对四个转盘进行排序,并以10进制规格编号,对应编号分别为1、2、3、4;
20、c、编号转换:将10进制编号转换为2进制,并且约束为4位数,则分别得到0001、0010、0011、0100,分别为转盘i、ii、iii、iv的编号;
21、d、号、位对应:将磁力位置a、磁力位置b、磁力位置c、磁力位置d分别对应2进制从左到右的四位数编号,若对应编号是“1”则在该位置嵌入磁铁,若对应是“0”则不嵌入磁铁;
22、e、正确装配:安装设计生产指南将转盘架组件正确装配好,并依照前述编号规则对底部磁力位置做好处理牢固;
23、步骤二:程序流程及信号处理
24、a、仪器点击运行,程序控制减速电机启动,底座组件开始转动,带着转盘组件一并转动,同时启动传感器的信号检测
25、b、底座组件里面的触发器转动到特定角度,触发传感器,传感器发出回馈信号给芯片;
26、c、芯片获取回馈信号,控制动力组件、底座组件停止转动,并启动四个磁力感应器a、磁力感应器b、磁力感应器c、磁力感应器d进行检测;
27、d、此时转盘架组件的四个磁力位置a、磁力位置b、磁力位置c、磁力位置d位于磁力感应器a、磁力感应器b、磁力感应器c、磁力感应器d的正上方1cm处,磁力位置中的磁铁会触发对应的磁力感应器,并反馈高电压信号给芯片,芯片根据四个感应器反馈的信号状态,判断装置上放的转盘架具体规格。
28、(三)有益效果
29、与现有技术相比,本发明提供了一种能全自动识别不同转盘架的装置及方法,具备以下有益效果:
30、1、本发明自动化程度高,用户无需再设置选用的转盘类型,使用仪器时更便捷,更高效。
31、2、本发明减少出错概率,用户选择转盘架出错会导致意外的发送,最终浪费样品,转盘架全自动识别方案可以有效减少该方面出错的可能,变相降低了成本。
技术特征:
1.一种能全自动识别不同转盘架的装置,其特征在于:包括动力及传动组件、底座组件、检测原点组件、磁力信号识别装置和转盘架组件;
2.根据权利要求1所述的一种能全自动识别不同转盘架的装置,其特征在于:所述下底板(24)的下方开的四个沉头孔,内可粘嵌特定规格的磁铁,分别为磁力位置a(25)、磁力位置b(26)、磁力位置c(27)、磁力位置d(28)。
3.根据权利要求2所述的一种能全自动识别不同转盘架的装置,其特征在于:所述磁力信号识别装置包括四个磁感底座(14),四个所述磁感底座(14)均匀分布在底座组件的四周,且四个所述磁感底座(14)上分别安装有磁力感应器a(15)、磁力感应器b(16)、磁力感应器c(18)、磁力感应器d(17);当转盘架组件放在转盘装置的随动支座(9)上面后,磁力位置a(25)、磁力位置b(26)、磁力位置c(27)、磁力位置d(28)分别对应在位于15-18的四个磁力感应器的正上方磁力感应器a(15)、磁力感应器b(16)、磁力感应器c(18)、磁力感应器d(17)。
4.根据权利要求3所述的一种能全自动识别不同转盘架的装置,其特征在于:所述检测原点组件包括触发器(12)和传感器(13),所述触发器(12)用于在当旋转结构移动到特定位置时触发传感器(13);所述传感器(13)用于在当触发器(12)到位时,反馈电信号给处理器进行运算。
5.根据权利要求4所述的一种能全自动识别不同转盘架的装置及方法,其特征在于:所述随动支座(9)上面有三个凸起形状与转盘架嵌合,用于带动转盘架旋转。
6.根据权利要求5所述的一种能全自动识别不同转盘架的装置,其特征在于:所述定位块(22)的底部有三个凹槽,形状与随动支座(9)的凸起形状一一对应,用于和随动支座(9)的配合,实现角度约束、定位作用。
7.根据权利要求1-6任一项所述的一种能全自动识别不同转盘架的装置的识别方法,其特征在于:包括如下步骤:
8.根据权利要求7所述的一种能全自动识别不同转盘架的装置的识别方法方法,其特征在于:所述步骤一包括:
9.根据权利要求7所述的一种能全自动识别不同转盘架的装置的识别方法方法,其特征在于:所述步骤二包括:
技术总结
本发明涉及全自动均质机技术领域,且公开了一种能全自动识别不同转盘架的装置,包括动力及传动组件、底座组件、检测原点组件、磁力信号识别装置和转盘架组件;所述底座组件包括固定板,所述固定板的下端面三个方向上均设有支撑座,用于支撑转盘架旋转结构;所述固定板的中间设有固定底座,所述固定底座的上端设有随动支座。本发明自动化程度高,用户无需再设置选用的转盘类型,使用仪器时更便捷,更高效。本发明减少出错概率,用户选择转盘架出错会导致意外的发送,最终浪费样品,转盘架全自动识别方案可以有效减少该方面出错的可能,变相降低了成本。
技术研发人员:蔡勇,黄梓僮
受保护的技术使用者:阿斯曼尔科技(上海)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!