一种钢梁防火涂料喷涂机器人及施工方法与流程
本发明涉及土木工程,具体涉及一种钢梁防火涂料喷涂机器人及施工方法。
背景技术:
1、钢材是一种常用的建筑材料,与混凝土相比,钢材具有更好的抗震、抗弯等特点,因此在现代建筑中,钢结构被广泛应用。然而不加保护的钢结构的耐火极限为15分钟左右,通常在450~650℃温度中就会失去承载能力,发生很大的形变,导致钢柱、钢梁弯曲甚至于结构坍塌,所以钢结构建筑需要做好防火工作。在钢结构上喷涂防火涂料可以抵御高温,在一定的时间内保护钢结构不变形不坍塌,延长人员的逃生及消防救援的时间。
2、钢梁防火涂料涂装方法多采用作业人员站在移动式脚手架上进行喷涂作业,传统方法问题如下:
3、首先,作业人员长期近距离接触污染性粉尘,带来尘肺等多发性职业病,对人员健康产生危害;
4、其次,涂装施工高空作业多,安全隐患较大。
5、另外,喷涂作业飞溅多,原材料利用率低,而且会造成周边环境的严重污染。
6、最后,变换作业位置时,人员需要不断上下移动脚手架,施工效率偏低。
7、由此可见,现有钢梁防火涂料涂装方法由于存在上述技术缺陷而导致工作效率低,由此可见,如何提高钢梁防火涂料的涂装效率为本领域需解决的问题。
技术实现思路
1、针对于现有钢梁防火涂料的涂装存在效率低的技术问题,本发明的目的在于提供一种钢梁防火涂料喷涂机器人,其使得施工过程高效、便捷,且适用于各类尺寸的钢梁防火涂料喷涂工程,在此基础上,还给出了钢梁防火涂料喷涂机器人的施工方法,有效地克服了现有技术所存在的问题。
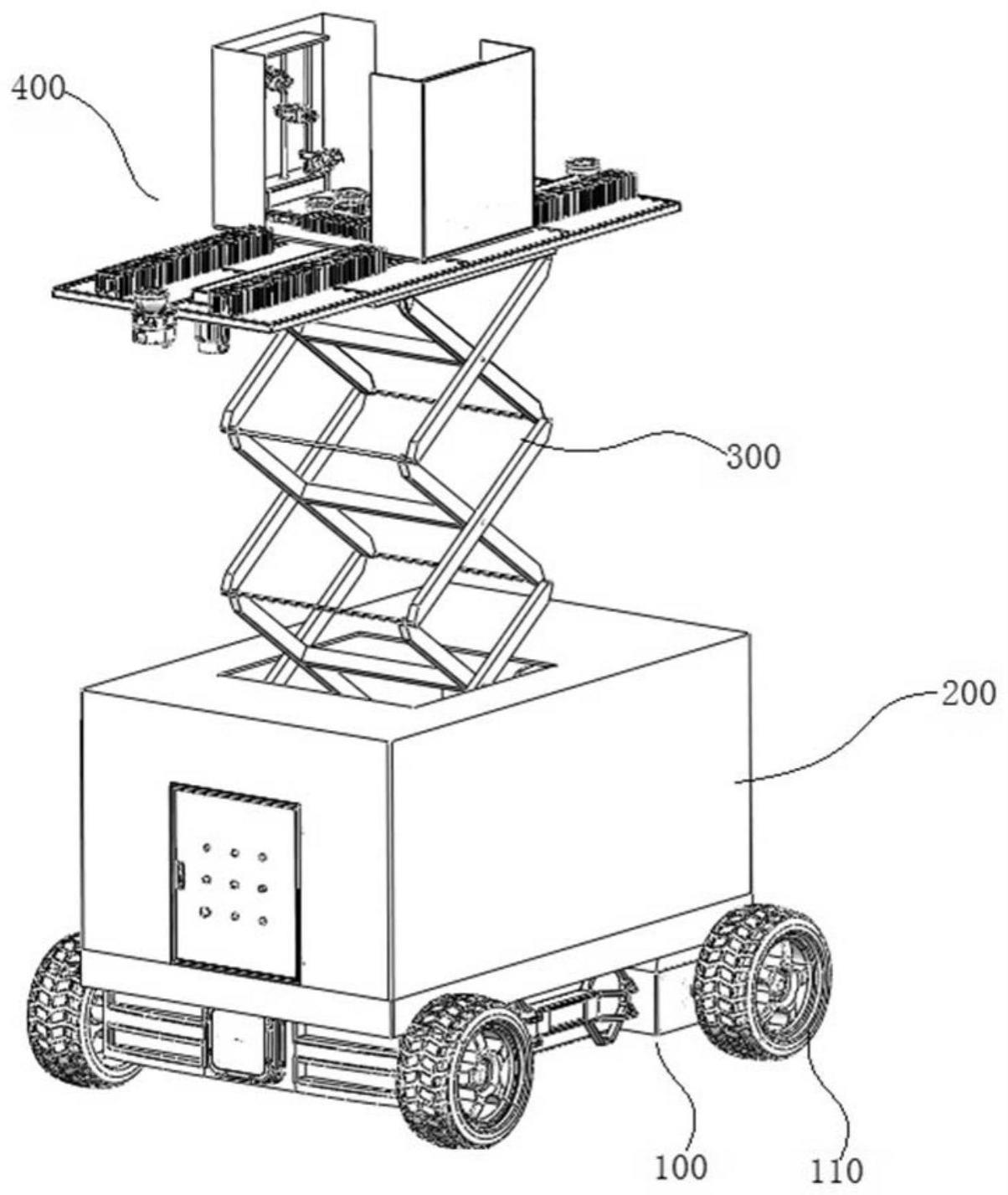
2、为了达到上述目的,本发明提供一种钢梁防火涂料喷涂机器人,包括移动底盘,车体,升降机构,喷涂机构以及控制系统;所述喷涂机构包括安装平台,以及设置于安装平台上的轨道组件以及喷涂组件,所述安装平台上分布有若干工位,所述安装平台与车体通过升降机构连接,所述喷涂组件与轨道组件配合,通过轨道组件相对安装平台上的工位进行第一方向和第二方向的位移;所述移动底盘设置于车体底部;所述控制系统设置于车体内部并控制连接移动底盘,升降机构,喷涂机构。
3、进一步地,所述喷涂组件包括若干第一喷枪,若干第二喷枪,第三喷枪以及两个安装座,所述两个安装座相对设置于安装平台上,中间形成喷涂区域;所述安装平台上设有垂直杆;所述第三喷枪设置于喷涂区域内的安装平台上的垂直杆上并可沿着垂直杆进行水平和轴向的移动,所述两个安装座内分别设有若干垂直杆,所述若干第一喷枪,若干第二喷枪分别相对应的设置于两个安装座的垂直杆上,可沿着垂直杆进行垂向移动。
4、进一步地,所述第一喷枪和第二喷枪可进行不同高度的调节。
5、进一步地,所述第三喷枪可进行高度调节。
6、进一步地,所述两个安装座底部分别配合设有滑板,所述滑板与轨道组件配合连接。
7、进一步地,所述轨道组件包括第一轴向移动导轨以及第二轴向移动导轨,所述第二轴向移动导轨对称设置于两个安装座之间,并配合两个安装座的滑板沿着第二轴向移动导轨进行第二方向的水平移动;所述第一轴向移动导轨分别设置于两个安装座的两侧,并配合两个安装座的滑板沿着第一轴向移动导轨进行第一方向的水平移动。
8、进一步地,所述钢梁防火涂料喷涂机器人还包括激光传感器,所述激光传感器安装于安装平台末端并与控制系统连接,通过激光传感器对钢梁的结构信息进行检测并传输给控制系统,控制系统根据检测信息控制喷涂机构相对钢梁进行位置调节。
9、进一步地,所述第一轴向移动导轨以及第二轴向移动导轨上分别配合设有风琴防护罩。
10、为了达到上述目的,本发明提供了一种钢梁防火涂料喷涂机器人的施工方法,所述施工方法包括如下步骤:
11、(1)将机器人遥控移动到某一段钢梁起点处下方;
12、(2)机器人通过末端激光传感器对待喷涂钢梁及进行检测,得到钢梁本体宽度和高度信息以及钢梁离地高度信息;
13、(3)根据末端激光传感器所检测的钢梁本体宽度和高度信息以及钢梁离地高度信息,控制系统调节喷涂组件整体高度,沿第二轴向的张开宽度、以及每把喷枪的高度;
14、(4)喷涂组件沿着第一轴向移动导轨按照规定速度移动并进行喷涂作业;,循环次数根据涂料厚度要求进行调整;
15、(5)机器人沿着钢梁方向移动和第一轴向移动导轨长度相等的距离,并重复步骤4;
16、(6)重复步骤4~5,直至一段钢梁喷涂完成,之后驱动喷涂组件沿着第一轴向移动导轨至下一段钢梁工位点进行喷涂作业。
17、本发明提供的钢梁防火涂料喷涂机器人,其通过机器人结构代替人工对钢梁防火涂料进行涂装,相比人工作业,实现了更高的喷涂效率,同时也能节约材料,并提高施工效率与施工品质。
18、同时,涂装工具其具有可调节功能,能够适用于各类尺寸的钢梁防火涂料喷涂工程。
技术特征:
1.一种钢梁防火涂料喷涂机器人,其特征在于,包括移动底盘,车体,升降机构,喷涂机构以及控制系统;所述喷涂机构包括安装平台,以及设置于安装平台上的轨道组件以及喷涂组件,所述安装平台上分布有若干工位,所述安装平台与车体通过升降机构连接,所述喷涂组件与轨道组件配合,通过轨道组件相对安装平台上的工位进行第一方向和第二方向的位移;所述移动底盘设置于车体底部;所述控制系统设置于车体内部并控制连接移动底盘,升降机构,喷涂机构。
2.根据权利要求1所述的一种钢梁防火涂料喷涂机器人,其特征在于,所述喷涂组件包括若干第一喷枪,若干第二喷枪,第三喷枪以及两个安装座,所述两个安装座相对设置于安装平台上,中间形成喷涂区域;所述安装平台上设有垂直杆;所述第三喷枪设置于喷涂区域内的安装平台上的垂直杆上并可沿着垂直杆进行水平和轴向的移动,所述两个安装座内分别设有若干垂直杆,所述若干第一喷枪,若干第二喷枪分别相对应的设置于两个安装座的垂直杆上,可沿着垂直杆进行垂向移动。
3.根据权利要求2所述的一种钢梁防火涂料喷涂机器人,其特征在于,所述第一喷枪和第二喷枪可进行不同高度的调节。
4.根据权利要求2所述的一种钢梁防火涂料喷涂机器人,其特征在于,所述第三喷枪可进行高度调节。
5.根据权利要求2所述的一种钢梁防火涂料喷涂机器人,其特征在于,所述两个安装座底部分别配合设有滑板,所述滑板与轨道组件配合连接。
6.根据权利要求5所述的一种钢梁防火涂料喷涂机器人,其特征在于,所述轨道组件包括第一轴向移动导轨以及第二轴向移动导轨,所述第二轴向移动导轨对称设置于两个安装座之间,并配合两个安装座的滑板沿着第二轴向移动导轨进行第二方向的水平移动;所述第一轴向移动导轨分别设置于两个安装座的两侧,并配合两个安装座的滑板沿着第一轴向移动导轨进行第一方向的水平移动。
7.根据权利要求1所述的一种钢梁防火涂料喷涂机器人,其特征在于,所述钢梁防火涂料喷涂机器人还包括激光传感器,所述激光传感器安装于安装平台末端并与控制系统连接,通过激光传感器对钢梁的结构信息进行检测并传输给控制系统,控制系统根据检测信息控制喷涂机构相对钢梁进行位置调节。
8.根据权利要求6所述的一种钢梁防火涂料喷涂机器人,其特征在于,所述第一轴向移动导轨以及第二轴向移动导轨上分别配合设有风琴防护罩。
9.一种钢梁防火涂料喷涂机器人的施工方法,其特征在于,所述施工方法包括如下步骤:
技术总结
本发明公开了一种钢梁防火涂料喷涂机器人及施工方法,包括移动底盘,车体,升降机构,喷涂机构以及控制系统;所述喷涂机构包括安装平台,以及设置于安装平台上的轨道组件以及喷涂组件,所述安装平台上分布有若干工位,所述安装平台与车体通过升降机构连接,所述喷涂组件与轨道组件配合,通过轨道组件相对安装平台上的工位进行第一方向和第二方向的位移;所述移动底盘设置于车体底部;所述控制系统设置于车体内部并控制连接移动底盘,升降机构,喷涂机构。本方案通过机器人结构代替人工对钢梁防火涂料进行涂装,相比人工作业,实现了更高的喷涂效率。
技术研发人员:包新宇,李金飞,魏森,樊警雷,阴光华,马昕煦,郑佳奇
受保护的技术使用者:中国建筑第八工程局有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!