面向大型平面型工件的自动喷涂工艺的实时路径规划方法与流程
【】本发明属于路径规划领域,特别是指面向大型平面型工件的自动喷涂工艺的实时路径规划方法。
背景技术
0、
背景技术:
1、箱梁涂装流水线需要针对大型结构件基于视觉设备实时规划自动喷涂路径,以替代人工,并提高安全及喷涂质量和效率。其中在实际生产中,有些工件的尺寸最大可达到33000×2000×3000mm,并且表面是平面状,仅存在少数开筋和梁等障碍。同时生产线为多品种小批量,节拍快。要求在规避开筋和梁等障碍前提下实时规划喷涂路径,以便实现自动品种切换。现有的方法有二种,第一种是基于人工示教/编程软件的离线生成预设喷涂轨迹的方案,第二种方式是基于三维重建的自动路径规划方案。其中基于人工示教的方式低效,轨迹精度差,仅能对应简单曲面,不满足在线实时要求。虽然基于编程软件的方式高效,轨迹精度高,能对应复杂曲面,但预先需要cad模型,也不满足无cad数据且在线实时的要求。而第二种方式轨迹精度高,能对应复杂曲面且不需要预先cad模型,但计算巨大,不满足在线实时要求。
技术实现思路
0、
技术实现要素:
1、本发明的目的在于提供一种面向大型平面型工件的自动喷涂工艺的实时路径规划方法,用以解决现有技术中基于人工示教的方式低效及轨迹精度差或基于三维重建的自动路径规划方案中计算巨大并且不满足在线实时要求的问题。
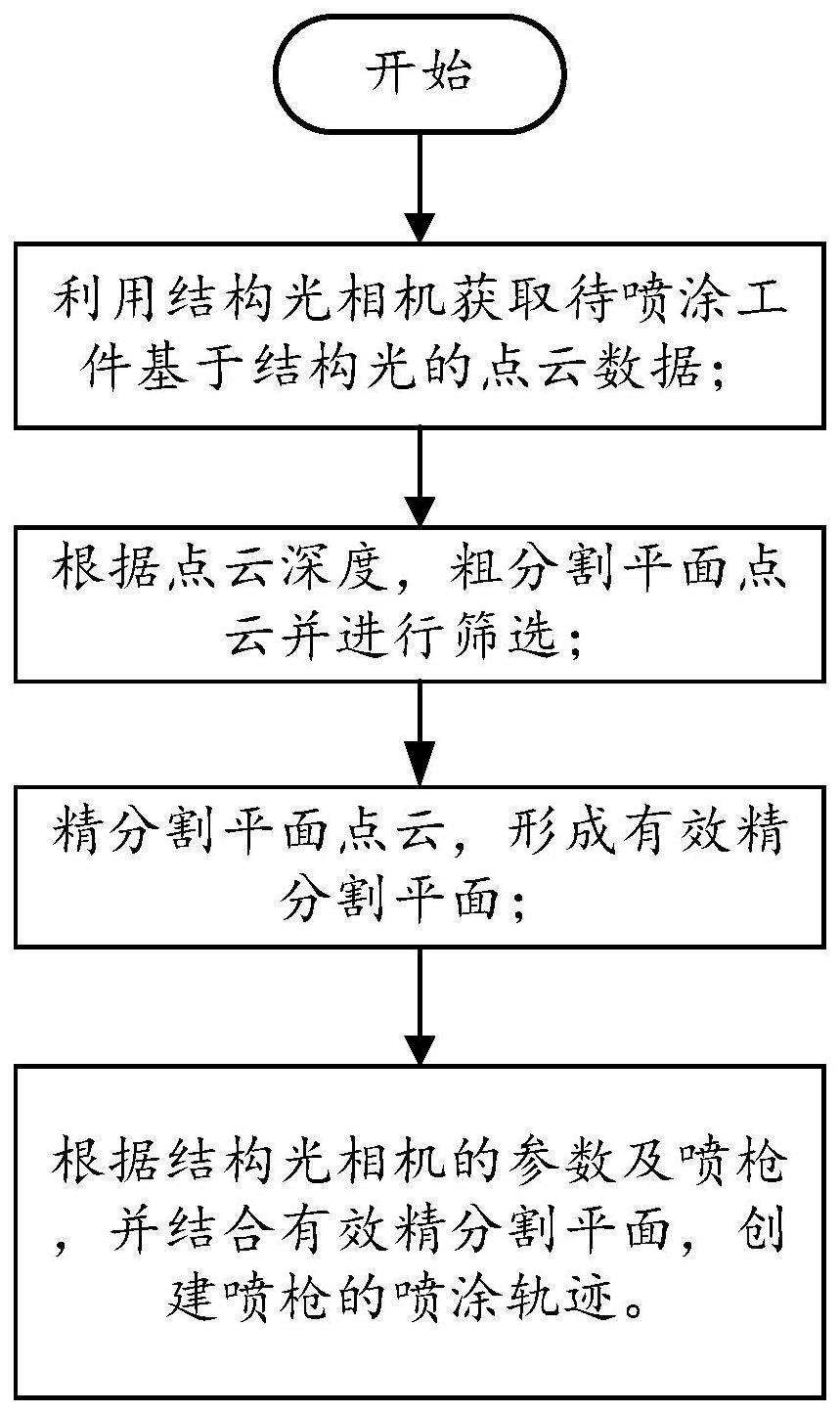
2、为实现上述目的,实施本发明的面向大型平面型工件的自动喷涂工艺的实时路径规划方法包括如下步骤:
3、利用结构光相机获取待喷涂工件基于结构光的点云数据;
4、根据点云深度,粗分割平面点云并进行筛选;
5、精分割平面点云,形成有效精分割平面;
6、根据结构光相机的参数及喷枪,并结合有效精分割平面,创建喷枪的喷涂轨迹。
7、依据上述主要特征,所述根据点云深度粗分割平面点云并进行筛选通过如下方式实现:
8、s201:计算点云的深度范围;
9、s202:计算分割层数;
10、s203:分割每层子点云,得到多层子点云;
11、s204:先选取首层子点云;
12、s205:判断所选择的子点云的数量占比是否超过总点云的第一阈值?如否,则至步骤s209;
13、s206:如是,则基于所选择的子点云拟合平面;
14、s207:判断拟合有效点数数量占比是否超过第二阈值?如否,则至步骤s209;
15、s208:如是则记录有效拟合平面;
16、s209:判断是否处理完所有分层?如是,则结束。如否,则选取下一层返回步骤s205。
17、依据上述主要特征,上述步骤s206中基于所选择的子点云拟合平面具体通过如下方式实现:
18、s300:基于所有点群拟合初始平面;
19、s301:计算所有点至所拟合的初始平面的投影距离;
20、s302:依据投影距离小于平均距离的标准过滤有效点群,只留下投影距离比较小的有效点云;
21、s303:基于有效点群优化平面。
22、依据上述主要特征,所精分割平面点云并形成有效精分割平面具体通过以下方式实现;
23、s400:选取首个粗分割平面点云步骤中形成的粗分割平面;
24、s401:计算当前有效拟合平面的点云的平均深度;
25、s402:基于平均深度重新分割当前层子点云;
26、s403:判断当前层子点云数量占比是否超过总点云第一阈值;如否,则至步骤s407;
27、s404:如是,则基于当前层子点云拟合平面;
28、s405:判断拟合平面有效点数占比是否超过第二阈值?如否,则至步骤s407;
29、s406:如是则记录有效精分割平面;
30、s407:判断是否处理完所有粗分割平面?
31、如是,则结束。如否则选取下一粗分割平面返回步骤s401。
32、依据上述主要特征,根据结构光相机的参数及喷枪并结合有效精分割平面创建喷枪的喷涂轨迹具体通过以下方式实现;
33、s500:建立喷涂矩阵,其中喷涂矩阵是根据结构光相机的远端视野、相机分辨率、喷枪横向间隔、喷枪纵向间隔确定;
34、s501:选取所述喷涂矩阵的首列;
35、s502:选取所述喷涂矩阵的首行;
36、s503:判断当前点是否属于上述的有效精分割平面;
37、s504:如是,则设定喷枪的位置为{x,y,z-喷涂间隔},喷枪姿态为当前点所属有效喷涂平面法向量;
38、s505:如否,则设定喷枪的位置为{x,y,缺省避障深度},喷枪姿态为缺省避障姿态;
39、s506:将当前喷枪位置姿态追加至喷涂轨迹中;
40、s507:判断是否遍历完所有行;如否则选取次行后至步骤s503;
41、s508:如是,则判断是否遍历完所有列;如否则选取次列后至步骤s502。
42、依据上述主要特征,所述第一阈值为15%,第二阈值为35%。
43、与现有技术相比较,本发明基于工件具有的主体喷涂区域是平面状且仅有少量开筋和梁的特点,通过分割出所有平面点云,并将其他未重建点云和非平面的重建点云作为避障点云以生成喷涂轨迹,因为避免了曲面重建、delaunay三角剖分、喷涂区域分割、平面组相交三角剖分面等复杂运算流程,从而实现了实时的带有避障功能的喷涂轨迹规划,从而满足了客户在多品种小批量生产模式下的自动品种切换的生产需求。
技术特征:
1.一种面向大型平面型工件的自动喷涂工艺的实时路径规划方法,其特征在于所述方法包括如下步骤:
2.如权利要求1所述的面向大型平面型工件的自动喷涂工艺的实时路径规划方法,其特征在于:所述根据点云深度粗分割平面点云并进行筛选通过如下方式实现:
3.如权利要求2所述的面向大型平面型工件的自动喷涂工艺的实时路径规划方法,其特征在于:上述步骤s206中基于所选择的子点云拟合平面具体通过如下方式实现:
4.如权利要求3所述的面向大型平面型工件的自动喷涂工艺的实时路径规划方法,其特征在于:所精分割平面点云并形成有效精分割平面具体通过以下方式实现;
5.如权利要求4所述的面向大型平面型工件的自动喷涂工艺的实时路径规划方法,其特征在于:根据结构光相机的参数及喷枪并结合有效精分割平面创建喷枪的喷涂轨迹具体通过以下方式实现;
6.如权利要求5所述的面向大型平面型工件的自动喷涂工艺的实时路径规划方法,其特征在于:所述第一阈值为15%,第二阈值为35%。
技术总结
本发明揭示一种面向大型平面型工件的自动喷涂工艺的实时路径规划方法,所述方法包括如下步骤:利用结构光相机获取待喷涂工件基于结构光的点云数据;根据点云深度,粗分割平面点云并进行筛选;精分割平面点云,形成有效精分割平面;根据结构光相机的参数及喷枪,并结合有效精分割平面,创建喷枪的喷涂轨迹,本发明基于工件具有的主体喷涂区域是平面状且仅有少量开筋和梁的特点,通过分割出所有平面点云,并将其他未重建点云和非平面的重建点云作为避障点云以生成喷涂轨迹,避免复杂运算,生成时间短,从而满足了客户在多品种小批量生产模式下的自动品种切换的生产需求。
技术研发人员:贾波,刘建
受保护的技术使用者:上海芯歌智能科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!