一种用于防盗门喷涂的自动遮盖装置及遮盖方法与流程
本发明属于自动喷涂领域,尤其涉及一种用于防盗门喷涂的自动遮盖装置及遮盖方法。
背景技术:
1、防盗门在自动喷涂过程中,对于不喷涂区域需要遮盖,现有生产方式由人工用胶带将油纸粘贴在门上遮盖,无法保证遮盖质量,遮盖质量由操作人员控制,无法保证遮盖全面性,此外防盗门喷涂产量巨大,对生产节拍要求很高,人工遮盖无法满足厂商的生产需求,市场急需生产效率高、产品质量稳定的自动化生产设备。
2、行业内通常采用的处理方式:人工将防盗门挂到悬挂链上,人工用油纸包裹防盗门表面遮盖不需要喷涂区域。
3、现有生产模式一个工位需要3个人工配合完成作业,耗费人力成本高、工作强度大、效率低;人工粘贴油纸时容易将油纸扯坏,无法保证遮盖质量。
4、因此我们提出了一种用于防盗门喷涂的自动遮盖装置及遮盖方法,用于解决上述问题。
技术实现思路
1、本发明针对现有技术中提出的问题,提出如下技术方案:
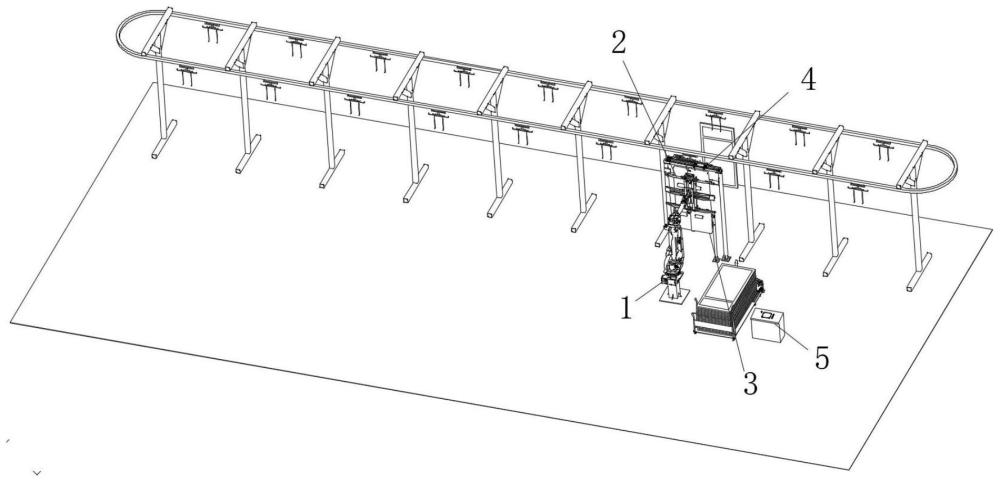
2、一种用于防盗门喷涂的自动遮盖装置及遮盖方法,包括机器人主体,所述机器人主体顶端安装有末端夹爪工装,且末端夹爪工装后侧抵接在遮盖工装前侧外壁,所述遮盖工装安装在随动机构前侧,所述机器人主体及末端夹爪工装、遮盖工装和随动机构通过安全护栏和控制系统信号控制连接;
3、所述机器人主体包括机器人底座和机器人支杆,所述机器人底座顶端活动安装有机器人支杆,且机器人支杆顶端活动连接在末端夹爪工装前侧中部。
4、机器人主体通过机器人底座固定于地面上,机器人主体顶端的末端夹爪工装用以夹取产品遮盖工装。
5、作为上述技术方案的优选,所述末端夹爪工装包括固定座、同步带、气缸、滑轨和夹头,所述固定座前侧中部皆安装有同步带,所述固定座前侧中部安装气缸,所述固定座前侧外壁下方对称安装有滑轨,所述固定座前侧中部的上下两端皆固定安装有夹头。
6、法兰盘固定座将末端夹爪工装固定于机器人末端,气缸的同步带带动夹头同步张开与闭合以打开遮盖工装,夹头固定于支架上,随滑轨来回移动。
7、作为上述技术方案的优选,所述遮盖工装包括左遮盖板、防盗门和右遮盖板,所述防盗门的左侧外壁滑动连接有左遮盖板,所述防盗门右侧外壁滑动连接有右遮盖板。
8、末端夹爪工装夹取左遮盖板和右遮盖板,套在防盗门上以完成遮盖。
9、作为上述技术方案的优选,所述随动机构包括导向杆、固定架、伺服模组和夹爪,所述固定架顶端外壁安装有伺服模组,所述固定架前侧底端安装有导向杆,所述伺服模组中部安装有夹爪。
10、防盗门随悬挂链来料,导向杆调整防盗门位置,夹爪夹紧挂钩,伺服模组带动防盗门跟随悬挂链匀速定向移动,等待机器人主体随动抓取。
11、一种用于防盗门喷涂的自动遮盖方法,包括以下步骤:
12、s1、机器人主体抓取遮盖工装等待防盗门来料;
13、s2、伺服模组随动夹爪夹紧防盗门挂钩并随悬挂链同步匀速运动;
14、s3、机器人主体与随动机构联动控制,同步随动机构流动;
15、s4、将遮盖工装套到防盗门上,完成防盗门不喷涂区域自动遮盖。
16、本发明的有益效果为:
17、整个生产流程为全自动化运行,主要为工装定位、机器人抓取工装、随动机构定位防盗门、机器人将工装安装到防盗门上。具有自动运行、速度快、效率高等优点,解决了耗费人力成本高、工作强度大、效率低、易造成物料损失、质量不一、人工人身安全等问题。
技术特征:
1.一种用于防盗门喷涂的自动遮盖装置,包括机器人主体(1),其特征在于:所述机器人主体(1)顶端安装有末端夹爪工装(2),且末端夹爪工装(2)后侧抵接在遮盖工装(3)前侧外壁,所述遮盖工装(3)安装在随动机构(4)前侧,所述机器人主体(1)及末端夹爪工装(2)、遮盖工装(3)和随动机构(4)通过安全护栏和控制系统(5)信号控制连接;
2.根据权利要求1所述的一种用于防盗门喷涂的自动遮盖装置,其特征在于,所述末端夹爪工装(2)包括固定座(21)、同步带(22)、气缸(23)、滑轨(24)和夹头(25),所述固定座(21)前侧中部皆安装有同步带(22),所述固定座(21)前侧中部安装气缸(23),所述固定座(21)前侧外壁下方对称安装有滑轨(24),所述固定座(21)前侧中部的上下两端皆固定安装有夹头(25)。
3.根据权利要求1所述的一种用于防盗门喷涂的自动遮盖装置,其特征在于,所述遮盖工装(3)包括左遮盖板(31)、防盗门(32)和右遮盖板(33),所述防盗门(32)的左侧外壁滑动连接有左遮盖板(31),所述防盗门(32)右侧外壁滑动连接有右遮盖板(33)。
4.根据权利要求1所述的一种用于防盗门喷涂的自动遮盖装置,其特征在于,所述随动机构(4)包括导向杆(41)、固定架(42)、伺服模组(43)和夹爪(44),所述固定架(42)顶端外壁安装有伺服模组(43),所述固定架(42)前侧底端安装有导向杆(41),所述伺服模组(43)中部安装有夹爪(44)。
5.根据权利要求1-4任意一种用于防盗门喷涂的自动遮盖方法,其特征在于,包括以下步骤:
技术总结
本发明公开了一种用于防盗门喷涂的自动遮盖装置及遮盖方法,包括机器人主体,所述机器人主体顶端安装有末端夹爪工装,且末端夹爪工装后侧抵接在遮盖工装前侧外壁,所述遮盖工装安装在随动机构前侧,所述机器人主体及末端夹爪工装、遮盖工装和随动机构通过安全护栏和控制系统信号控制连接。本发明整个生产流程为全自动化运行,主要为工装定位、机器人抓取工装、随动机构定位防盗门、机器人将工装安装到防盗门上。具有自动运行、速度快、效率高等优点,解决了耗费人力成本高、工作强度大、效率低、易造成物料损失、质量不一、人工人身安全等问题。
技术研发人员:张伟,薛和芬,薛永兴
受保护的技术使用者:安徽集萃智造机器人科技有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!