一种带重力补偿的点胶机及其控制方法与流程
本申请涉及电子制造与自动化工业加工设备,特别涉及一种带重力补偿的点胶机及其控制方法。
背景技术:
1、点胶机是一种专门对流体进行控制,将流体点滴或涂覆于产品表面或产品内部的自动化工业加工设备,点胶机广泛用于电路板焊接、led封装涂胶、电子元器件的封装制造以及精密器件的胶合密封等领域。在现有技术中,为了实现点胶的均匀,点胶机通常通过提供恒定的推进气压,来实现点胶针筒的匀速推进和点胶头出胶流量的均匀。现有技术所采用的这种方法在绝大多数场合都可以满足使用要求,但通过产生恒定的推进气压并不能绝对保证恒定的出胶速度,在对点胶均匀性和流量具有较高要求的应用场景以及在胶体粘性较低的应用场景,胶筒中胶体量的多少会对点胶头的出胶流量产生较大影响。一般来说,胶体的量越多,则流量越大,胶体的量越少,则流量越小。因此,为更好的控制胶体保持稳定的出胶量,必须考虑到出胶过程中胶体量的变化。
技术实现思路
1、针对现有技术存在的出胶流量无法保持恒定的问题,本申请主要提供一种带重力补偿的点胶机及其控制方法。
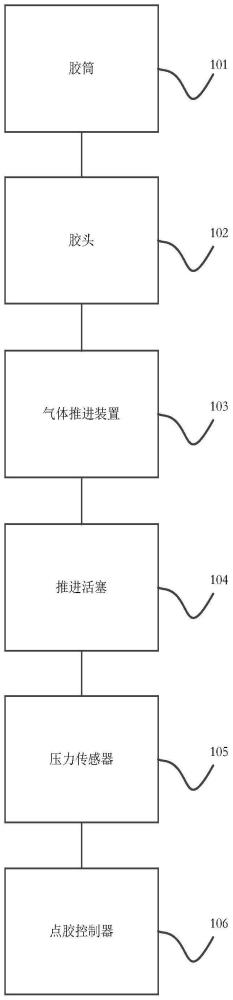
2、为了实现上述目的,本申请采用的第一个技术方案是提供一种带重力补偿的点胶即,其包括:胶筒,其装载有胶体;胶头,其位于胶筒的底端并与胶筒连通;气体推进装置,其将气体从胶筒的顶端推入胶筒内;推进活塞,其贴合胶筒的内壁,并在气体的推压下挤压胶体,使胶体从胶头排出;压力传感器,其贴附于胶筒底端,用于动态感测点胶机的实时重量;点胶控制器,其根据点胶机的实时重量,动态调节气体推进装置所产生的推进气压,以保证胶头的出胶流量恒定。
3、可选的,点胶控制器,根据点胶机的实时重量,动态调节气体推进装置所产生的推进气压,以保证胶头的出胶流量恒定的过程包括:点胶控制器根据点胶机的实时重量,计算得到胶体的实时重量,并根据胶体的实时重量的减小量,使气体推进装置增加相应的动态补偿气压,使得经动态调节的推进气压与胶体及推进活塞的重力压强之和保持恒定。
4、可选的,动态补偿气压与胶体的实时重量减小量对应的重力压强的减小量相等。
5、可选的,根据胶体的实时重量的减小量,使气体推进装置增加相应的动态补偿气压的过程包括:点胶控制器根据预先测定的胶筒的内部横截面积,以及胶体的实时重量的减小量,计算得到重力压强的减小量,从而确定动态补偿气压。
6、可选的,压力传感器为环绕胶头的环形压力传感器。
7、本申请采用的第二个技术方案是:提供一种带重力补偿的点胶机的控制方法,点胶机包括:胶筒,其装载有胶体;胶头,其位于胶筒的底端并与胶筒连通;气体推进装置,其将气体从胶筒的顶端推入胶筒内;推进活塞,其贴合胶筒的内壁,并在气体的推压下挤压胶体,使胶体从胶头排出;压力传感器,其贴附于胶筒底端;点胶控制器,带重力补偿的点胶机的控制方法包括:由压力传感器动态感测点胶机的实时重量;由点胶控制器根据点胶机的实时重量,动态调节气体推进装置所产生的推进气压,以保证胶头的出胶流量恒定。
8、可选的,由点胶控制器根据点胶机的实时重量,动态调节气体推进装置所产生的推进气压,以保证胶头的出胶流量恒定的过程包括:点胶控制器根据点胶机的实时重量,计算得到胶体的实时重量,并根据胶体的实时重量的减小量,使气体推进装置增加相应的动态补偿气压,使得经动态调节的推进气压与胶体及推进活塞的重力压强之和保持恒定。
9、可选的,动态补偿气压与胶体的实时重量减小量对应的重力压强的减小量相等。
10、可选的,根据胶体的实时重量的减小量,使气体推进装置增加相应的动态补偿气压的过程包括:点胶控制器根据预先测定的胶筒的内部横截面积,以及胶体的实时重量的减小量,计算得到重力压强的减小量,从而确定动态补偿气压。
11、可选的,由压力传感器动态感测点胶机的实时重量的过程包括,将胶筒更换为满胶时点胶机的重量,作为点胶机的初始重量;并且由点胶控制器根据点胶机的实时重量,动态调节气体推进装置所产生的推进气压,以保证胶头的出胶流量恒定的过程包括,将胶筒更换为满胶时设定的气体推进装置的推进气压,作为初始推进压力。
12、本申请的技术方案可以达到的有益效果是:通过监控胶体量的变化,动态调节推进气体的推进气压,从而实现对出胶量的控制,使得出胶量保持恒定。
技术特征:
1.一种带重力补偿的点胶机,其特征在于,包括:
2.根据权利要求1所述的带重力补偿的点胶机,其特征在于,所述点胶控制器,根据所述点胶机的实时重量,动态调节所述气体推进装置所产生的推进气压,以保证所述胶头的出胶流量恒定的过程包括:
3.根据权利要求2所述的带重力补偿的点胶机,其特征在于,所述动态补偿气压与所述胶体的实时重量减小量对应的所述重力压强的减小量相等。
4.根据权利要求1所述的带重力补偿的点胶机,其特征在于,所述根据所述胶体的实时重量的减小量,使所述气体推进装置增加相应的动态补偿气压的过程包括:
5.根据权利要求1所述的带重力补偿的点胶机,其特征在于,所述压力传感器为环绕所述胶头的环形压力传感器。
6.一种带重力补偿的点胶机的控制方法,所述点胶机包括:胶筒,其装载有胶体;胶头,其位于所述胶筒的底端并与所述胶筒连通;气体推进装置,其将气体从所述胶筒的顶端推入胶筒内;推进活塞,其贴合所述胶筒的内壁,并在所述气体的推压下挤压所述胶体,使所述胶体从所述胶头排出;压力传感器,其贴附于所述胶筒底端;点胶控制器,其特征在于,所述带重力补偿的点胶机的控制方法包括:
7.根据权利要求6所述的带重力补偿的点胶机的控制方法,其特征在于,所述由所述点胶控制器根据所述点胶机的实时重量,动态调节所述气体推进装置所产生的推进气压,以保证所述胶头的出胶流量恒定的过程包括:
8.根据权利要求7所述的带重力补偿的点胶机的控制方法,其特征在于,所述动态补偿气压与所述胶体的实时重量减小量对应的所述重力压强的减小量相等。
9.根据权利要求6所述的带重力补偿的点胶机的控制方法,其特征在于,所述根据所述胶体的实时重量的减小量,使所述气体推进装置增加相应的动态补偿气压的过程包括:
10.根据权利要求6所述的带重力补偿的点胶机的控制方法,其特征在于,
技术总结
本申请公开了一种带重力补偿的点胶机及其控制方法,属于电子制造与自动化工业加工设备技术领域。该点胶机主要包括:胶筒,其装载有胶体;胶头,其位于胶筒的底端并与胶筒连通;气体推进装置,其将气体从胶筒的顶端推入胶筒内;推进活塞,其贴合胶筒的内壁,并在气体的推压下挤压胶体,使胶体从胶头排出;压力传感器,其贴附于胶筒底端,用于动态感测点胶机的实时重量;点胶控制器,其根据点胶机的实时重量,动态调节气体推进装置所产生的推进气压,以保证胶头的出胶流量恒定。本申请能够消除胶体重力的影响,提高点胶流量的稳定性,进而保证点胶效果。
技术研发人员:徐冰,李俭清
受保护的技术使用者:山东芯源光电科技有限公司
技术研发日:
技术公布日:2024/5/27
- 还没有人留言评论。精彩留言会获得点赞!