一种自动喷涂机器人的制作方法
本技术涉及喷涂机器人,特别是涉及一种自动喷涂机器人。
背景技术:
1、机器人涂装系统,是采用工业机器人为核心,并配有自动喷请,供漆系统,储漆罐,管路清洗系统,排风系统组成。涂漆机器人多采用5或6自由度关节式结构,手臂有较大的运动空间,并可做复杂的轨迹运动,其腕部一般有2~3个自由度,可灵活运动。较先进的喷漆机器人腕部采用柔性手腕,既可向各个方向弯曲,又可转动,其动作类似人的手腕,能方便地通过较小的孔伸入工件内部,喷涂其内表面。
2、在现有技术中自动喷涂机器人的喷涂枪喷出的是雾状油漆,雾状油漆在喷涂边缘位置的造成油漆没有着力点,飞溅的油漆混合在空气中,造成挥发性有害气体排放量较多,污染生产空间。
技术实现思路
1、本实用新型所要解决的技术问题是在现有技术中自动喷涂机器人的喷涂枪喷出的是雾状油漆,雾状油漆在喷涂边缘位置的造成油漆没有着力点,飞溅的油漆混合在空气中,造成挥发性有害气体排放量较多,污染生产空间。
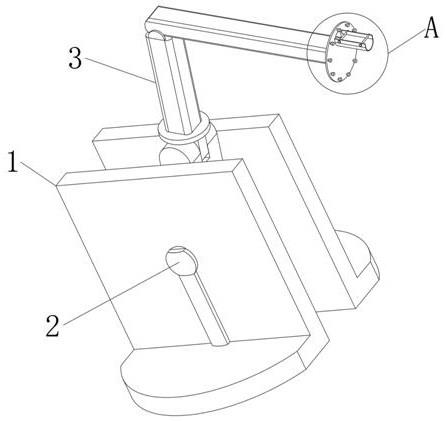
2、为解决上述技术问题,本实用新型采用的一个技术方案是:提供一种自动喷涂机器人,包括机器人支撑架,所述机器人支撑架位置支撑设置有机器人摆臂,所述机器人摆臂远离机器人支撑架一端位置设置有喷涂结构;
3、所述喷涂结构包括固定连接盘,所述固定连接盘与机器人摆臂端部位置固定连接,所述固定连接盘远离机器人摆臂一侧外缘面位置固定连接有若干均匀分布的气状界线喷头,所述固定连接盘端面位置设置有喷枪连接结构,所述机器人支撑架一侧位置固定连接有驱动动力结构,所述驱动动力结构的驱动端与机器人摆臂连接。
4、本实用新型进一步设置为,所述喷枪连接结构包括贯穿孔,所述贯穿孔与固定连接盘侧壁呈贯穿设置,所述固定连接盘远离机器人摆臂一侧位于贯穿孔位置固定连接有半环形设置的喷枪夹持块。
5、本实用新型进一步设置为,所述喷枪夹持块两端位置设置有两个对称设置的立板,且两个立板位置贯穿螺纹连接有固定卡和螺栓。
6、本实用新型进一步设置为,所述喷枪夹持块与贯穿孔呈同心设置。
7、本实用新型进一步设置为,所述气状界线喷头包括喷头球杆,所述喷头球杆远离机器人摆臂一端呈球形设置,所述喷头球杆靠近球形设置的一端位置转动连接有转动调节块。
8、本实用新型进一步设置为,所述转动调节块与喷头球杆转动接触的位置设置有密封防漏垫,所述密封防漏垫与喷头球杆的球体外壁固定连接,且密封防漏垫为橡胶材料。
9、本实用新型进一步设置为,所述喷头球杆远离转动调节块一端位置贯穿固定连接有气源连接头。
10、本实用新型进一步设置为,所述转动调节块远离气源连接头一侧位置开设有锥形设置的气体喷嘴。
11、本实用新型的有益效果如下:
12、本实用新型通过设置气状界线喷头,通过调整转动调节块的朝向,调整喷气的方向,在喷枪周围形成一个环形的气状帘,避免雾化的油漆散发污染空气,且喷雾集中,使得喷雾效果更好。
技术特征:
1.一种自动喷涂机器人,包括机器人支撑架(1),其特征在于:所述机器人支撑架(1)位置支撑设置有机器人摆臂(3),所述机器人摆臂(3)远离机器人支撑架(1)一端位置设置有喷涂结构;
2.根据权利要求1所述的一种自动喷涂机器人,其特征在于:所述喷枪连接结构包括贯穿孔(6),所述贯穿孔(6)与固定连接盘(7)侧壁呈贯穿设置,所述固定连接盘(7)远离机器人摆臂(3)一侧位于贯穿孔(6)位置固定连接有半环形设置的喷枪夹持块(4)。
3.根据权利要求2所述的一种自动喷涂机器人,其特征在于:所述喷枪夹持块(4)两端位置设置有两个对称设置的立板,且两个立板位置贯穿螺纹连接有固定卡和螺栓(5)。
4.根据权利要求2所述的一种自动喷涂机器人,其特征在于:所述喷枪夹持块(4)与贯穿孔(6)呈同心设置。
5.根据权利要求1所述的一种自动喷涂机器人,其特征在于:所述气状界线喷头(8)包括喷头球杆(80),所述喷头球杆(80)远离机器人摆臂(3)一端呈球形设置,所述喷头球杆(80)靠近球形设置的一端位置转动连接有转动调节块(81)。
6.根据权利要求5所述的一种自动喷涂机器人,其特征在于:所述转动调节块(81)与喷头球杆(80)转动接触的位置设置有密封防漏垫(83),所述密封防漏垫(83)与喷头球杆(80)的球体外壁固定连接,且密封防漏垫(83)为橡胶材料。
7.根据权利要求5所述的一种自动喷涂机器人,其特征在于:所述喷头球杆(80)远离转动调节块(81)一端位置贯穿固定连接有气源连接头(84)。
8.根据权利要求5所述的一种自动喷涂机器人,其特征在于:所述转动调节块(81)远离气源连接头(84)一侧位置开设有锥形设置的气体喷嘴(82)。
技术总结
本技术公开了一种自动喷涂机器人,包括机器人支撑架,所述机器人支撑架位置支撑设置有机器人摆臂,所述机器人摆臂远离机器人支撑架一端位置设置有喷涂结构,所述喷涂结构包括固定连接盘,所述固定连接盘与机器人摆臂端部位置固定连接,所述固定连接盘远离机器人摆臂一侧外缘面位置固定连接有若干均匀分布的气状界线喷头,所述固定连接盘端面位置设置有喷枪连接结构,所述机器人支撑架一侧位置固定连接有驱动动力结构,所述驱动动力结构的驱动端与机器人摆臂连接。本技术通过设置气状界线喷头,通过调整转动调节块的朝向,调整喷气的方向,在喷枪周围形成一个环形的气状帘,避免雾化的油漆散发污染空气,且喷雾集中,使得喷雾效果更好。
技术研发人员:历娜,王军,荣俭,吕向博
受保护的技术使用者:沈阳先施机械装备制造有限公司
技术研发日:20230329
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!