一种辅助操作机器人的制作方法
本技术涉及实验室辅助用具,具体为一种辅助操作机器人。
背景技术:
1、实验室即进行实验的场所,实验室是科学的摇篮,是科学研究的基地,科技发展的源泉,对科技发展起着非常重要的作用,而化学实验室是提供化学实验条件及其进行科学探究的重要场所。其内有大量的仪器:铁架台、石棉网、酒精灯等实验工具。通常会配有化学药品柜,药柜里面有常用的化学药品,而在实验中,对于试剂材料装纳的试管摆设架较为重要的工具。
2、现有试管架在使用中,当多组试管放置于同一组试管架时,在进行试管的抽取使用时,由于多组试管高度一致,则容易触碰到其他试管,对于实验的材料拿取并不方便稳定,为此,我们提出一种辅助操作机器人。
技术实现思路
1、本实用新型的目的在于提供一种辅助操作机器人,以解决上述背景技术中提出的问题。
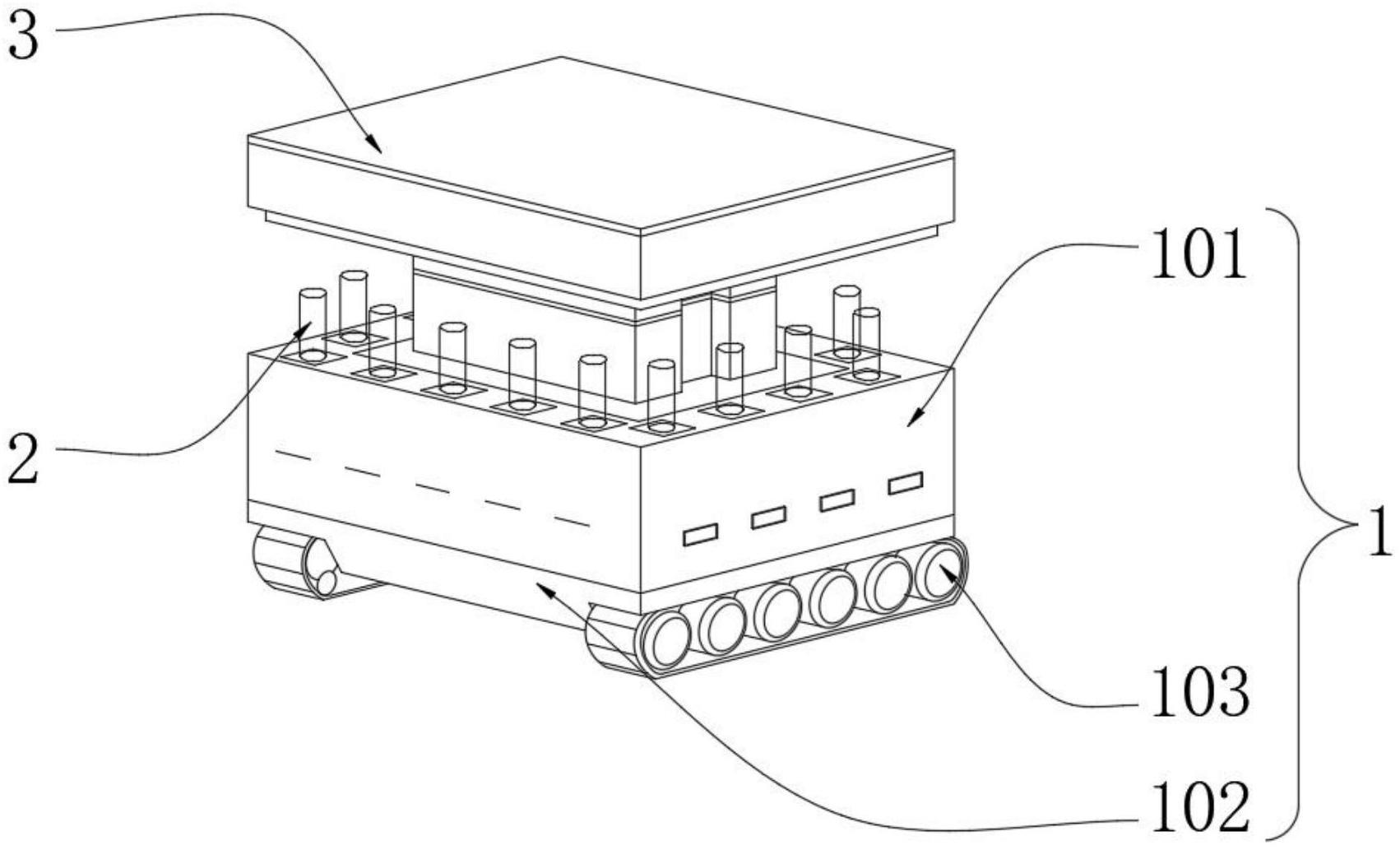
2、为实现上述目的,本实用新型提供如下技术方案:一种辅助操作机器人,包括主体、试管收纳机构和顶位防护机构,所述主体的内部四周分布有试管收纳机构,且试管收纳机构的顶部设置有顶位防护机构,所述试管收纳机构包括收纳仓、辅助套管、收纳试管、电动推杆和按钮,且收纳仓的内部设置有辅助套管,所述辅助套管的内部设置有收纳试管,且辅助套管的底端设置有电动推杆,所述电动推杆的一侧设置有按钮。
3、进一步的,所述电动推杆顶端与辅助套管底部相连接,且辅助套管的内壁卡合有收纳试管。
4、进一步的,所述辅助套管通过电动推杆与收纳仓构成升降结构,且按钮与电动推杆之间相连接。
5、进一步的,所述主体包括架体、底盘和履带轮,且架体的底端设置有底盘,所述底盘的两侧分布有履带轮。
6、进一步的,所述架体与底盘之间为固定连接,且履带轮与底盘之间为传动结构。
7、进一步的,所述顶位防护机构包括顶架、框槽、胶皮垫、气缸架和试管盖,且顶架的底面四周设置有框槽,所述框槽的底面设置有胶皮垫,且顶架的底面中部设置有气缸架,所述气缸架的四周分布有试管盖。
8、进一步的,所述顶架通过框槽与主体相卡合,且框槽底面四周均与胶皮垫相贴合。
9、进一步的,所述顶架通过气缸架与主体构成升降结构,且试管盖位置与试管收纳机构位置相对齐。
10、与现有技术相比,本实用新型的有益效果是:该辅助操作机器人,通过分布的电动推杆延伸向上抬升,从而让辅助套管内的收纳试管升高,便于抽取使用,通过这种抬升辅助方式,避免实验人员在进行试管的抽取使用时接触其它试管,从而产生意外,提升使用安全性和实验效率质量,而此收纳仓在设备内分布有多组,不但便于拿取使用且利于分类收纳。
11、此机器人通过底盘和履带轮组成的传动结构,可在实验室桌台上进行稳定的行驶过程,避免出现打滑现象,可稳定的将需要使用的试管进行台面上的短距输送,节省实验人员取用流程。
12、此机器人处于试管的收纳状态时,可通过顶架四周的框槽与其扣合固定,而由于框槽底面贴合有胶皮垫,可保持闭合稳定和密闭性,同时底面分布的试管盖也与收纳试管位置一一对应,可让收纳的试管全部保持闭合,以此进一步提升收纳稳定和防护性。
技术特征:
1.一种辅助操作机器人,包括主体(1)、试管收纳机构(2)和顶位防护机构(3),其特征在于:所述主体(1)的内部四周分布有试管收纳机构(2),且试管收纳机构(2)的顶部设置有顶位防护机构(3),所述试管收纳机构(2)包括收纳仓(201)、辅助套管(202)、收纳试管(203)、电动推杆(204)和按钮(205),且收纳仓(201)的内部设置有辅助套管(202),所述辅助套管(202)的内部设置有收纳试管(203),且辅助套管(202)的底端设置有电动推杆(204),所述电动推杆(204)的一侧设置有按钮(205)。
2.根据权利要求1所述的一种辅助操作机器人,其特征在于:所述电动推杆(204)顶端与辅助套管(202)底部相连接,且辅助套管(202)的内壁卡合有收纳试管(203)。
3.根据权利要求1所述的一种辅助操作机器人,其特征在于:所述辅助套管(202)通过电动推杆(204)与收纳仓(201)构成升降结构,且按钮(205)与电动推杆(204)之间相连接。
4.根据权利要求1所述的一种辅助操作机器人,其特征在于:所述主体(1)包括架体(101)、底盘(102)和履带轮(103),且架体(101)的底端设置有底盘(102),所述底盘(102)的两侧分布有履带轮(103)。
5.根据权利要求4所述的一种辅助操作机器人,其特征在于:所述架体(101)与底盘(102)之间为固定连接,且履带轮(103)与底盘(102)之间为传动结构。
6.根据权利要求1所述的一种辅助操作机器人,其特征在于:所述顶位防护机构(3)包括顶架(301)、框槽(302)、胶皮垫(303)、气缸架(304)和试管盖(305),且顶架(301)的底面四周设置有框槽(302),所述框槽(302)的底面设置有胶皮垫(303),且顶架(301)的底面中部设置有气缸架(304),所述气缸架(304)的四周分布有试管盖(305)。
7.根据权利要求6所述的一种辅助操作机器人,其特征在于:所述顶架(301)通过框槽(302)与主体(1)相卡合,且框槽(302)底面四周均与胶皮垫(303)相贴合。
8.根据权利要求6所述的一种辅助操作机器人,其特征在于:所述顶架(301)通过气缸架(304)与主体(1)构成升降结构,且试管盖(305)位置与试管收纳机构(2)位置相对齐。
技术总结
本技术公开了一种辅助操作机器人,包括主体、试管收纳机构和顶位防护机构,所述主体的内部四周分布有试管收纳机构,且试管收纳机构的顶部设置有顶位防护机构,所述试管收纳机构包括收纳仓、辅助套管、收纳试管、电动推杆和按钮,且收纳仓的内部设置有辅助套管,所述辅助套管的内部设置有收纳试管,且辅助套管的底端设置有电动推杆。该辅助操作机器人,通过分布的电动推杆延伸向上抬升,从而让辅助套管内的收纳试管升高,便于抽取使用,通过这种抬升辅助方式,避免实验人员在进行试管的抽取使用时接触其它试管,从而产生意外,提升使用安全性和实验效率质量,而此收纳仓在设备内分布有多组,不但便于拿取使用且利于分类收纳。
技术研发人员:蔡文城,刘彩燕
受保护的技术使用者:深圳朝晖兴科技有限公司
技术研发日:20230509
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!