一种喷涂加工输送线专用滑撬的制作方法
本技术涉及机器人本体喷涂生产线及其自动化装配作业输送线领域,具体是一种用于机器人喷涂生产线输送用专用滑撬。
背景技术:
1、机器人喷涂生产线输送用专用滑撬主要用于机器人本体喷涂生产线,是装载机器人本体进行输送用的一种工具载体,其原理主要是通过人工将机器人本体吊装到专用滑撬上,并进行固定,然后通过专用滑撬下方的滚床提供动力,使装载完成的(机器人本体)专用滑撬向前运行,直至输送到机器人喷涂工位,然后进行喷涂,喷涂完成后,专用滑撬带着已经喷涂完成的机器人输送至机器人烘房,完成机器人本体油漆烘干,烘干完成后,专用滑撬带着机器人本体输送至下件区域进行下件作业,完成一个工作循环。
2、目前国内机器人本体喷涂载具(即滑撬)基本采用人工手推台车的方式,在移动机器人时,传统的台车只能实现单个工位的作业,工位与工位之间需要人工推动台车进行传递,不能实现自动化,而且效率低下,使用时有局限性,投入人力较多,且推车过程中机器人本体的稳定性不高,同时手推台车的方式无法与自动喷涂进程精准衔接,产能低,不利于智能化输送加工作业。
3、针对上述问题,急需在原有用于机器人喷涂生产线输送用专用滑撬的基础上进行创新设计。
技术实现思路
1、本实用新型技术方案针对现有技术解决方案过于单一的技术问题,提供了显著不同于现有技术的解决方案,具体地本实用新型的目的在于提供一种喷涂加工输送线专用滑撬,以解决上述背景技术提出目前国内机器人本体喷涂载具(即滑撬)基本采用人工手推台车的方式,在移动机器人时,投入人力较多,且机器人本体的稳定性不高,同时手推台车的方式无法与自动喷涂进程精准衔接,产能低,不利于智能化输送加工作业的问题。
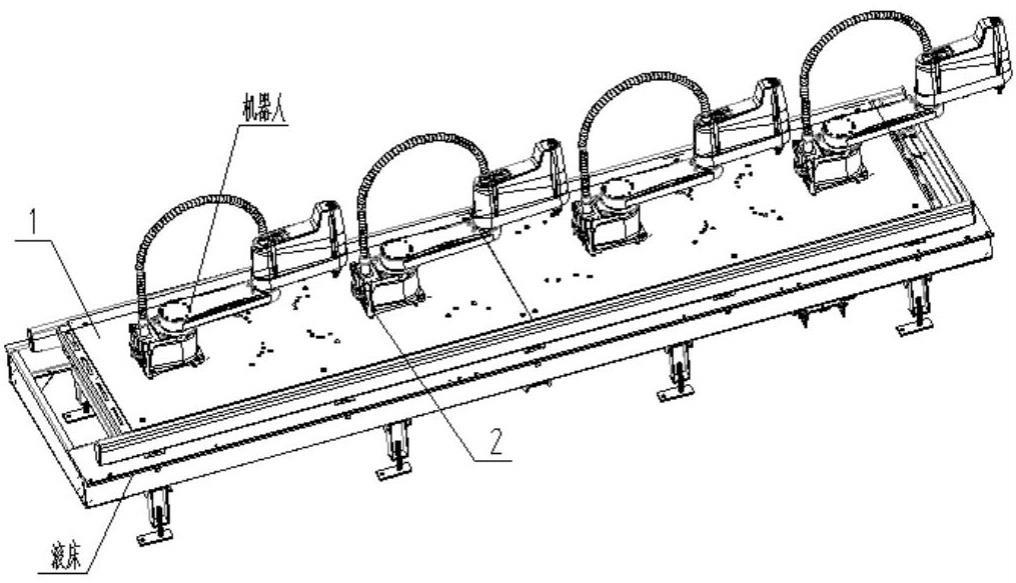
2、为实现上述目的,本实用新型提供如下技术方案:一种喷涂加工输送线专用滑撬,包括机器人本体、滚床和滑撬底板,所述滑撬底板安装于滚床的上表面,且机器人本体等间距分布于滑撬底板的上表面,所述滑撬底板用以将滚床的动力平缓的传输给机器人本体,且滑撬底板与滚床之间分别设置有螺栓螺母、纵梁、底板连接角钢和底板支撑弯折板。
3、优选的,所述纵梁和底板支撑弯折板构成滑撬底板的整体框架,且纵梁关于底板支撑弯折板的中心轴线对称设置。
4、优选的,所述滑撬底板上均匀设置有用以紧固机器人本体的螺栓螺母,且滑撬底板上表面开设有与螺栓螺母相适配的螺孔。
5、优选的,所述底板支撑弯折板在两个所述纵梁之前等间距焊接有十组,且采用120×50×5的矩形管,用于承载及输送机器人本体。
6、优选的,所述底板连接角钢的两边分别焊接于纵梁的内侧和底板支撑弯折板的一侧用以加固纵梁和底板支撑弯折板的连接,且底板连接角钢在每一个所述底板支撑弯折板的两端对称设置,所述底板连接角钢的内部贯通开设有与螺栓螺母相适配的螺孔,用以稳定连接机器人本体和滑撬底板。
7、与现有技术相比,本实用新型的有益效果是:
8、优化了传统的手推台车作为载具移动机器人本体的方式,通过操作人员将未装的机器人本体吊装至专用滑撬的上方底板上,使机器人本体的底座螺栓孔对准专用滑撬的底板螺栓孔,然后用螺栓螺母将机器人本体固定在滑撬底板上,专用滑撬带着机器人本体通过下方的滚床进行自动化输送(滚床提供动力),输送到机器人本体喷涂工位后自动停止,然后进行喷涂作业,喷涂完成后,专用滑撬带着机器人本体自动运行到机器人烘干房进行烘干,机器人烘干完成后,自动运行到下件工位,进行下件,将机器人本体吊装至地面,一个工作循环结束,相较于传统的手推台车方式既可以进行机器人本体自动化输送装配作业,也可以实现机器人本体喷涂作业,省时省力的同时更具稳定性,同时机械化的传输方式能够与自动喷涂进程精准衔接,产能高,符合智能化输送加工理念。
技术特征:
1.一种喷涂加工输送线专用滑撬,包括机器人本体、滚床和滑撬底板(1),其特征在于:所述滑撬底板(1)安装于滚床的上表面,且机器人本体等间距分布于滑撬底板(1)的上表面,所述滑撬底板(1)用以将滚床的动力平缓的传输给机器人本体,且滑撬底板(1)与滚床之间分别设置有螺栓螺母(2)、纵梁(3)、底板连接角钢(4)和底板支撑弯折板(5)。
2.根据权利要求1所述的一种喷涂加工输送线专用滑撬,其特征在于:所述纵梁(3)和底板支撑弯折板(5)构成滑撬底板(1)的整体框架,且纵梁(3)关于底板支撑弯折板(5)的中心轴线对称设置。
3.根据权利要求1所述的一种喷涂加工输送线专用滑撬,其特征在于:所述滑撬底板(1)上均匀设置有用以紧固机器人本体的螺栓螺母(2),且滑撬底板(1)上表面开设有与螺栓螺母(2)相适配的螺孔。
4.根据权利要求2所述的一种喷涂加工输送线专用滑撬,其特征在于:所述底板支撑弯折板(5)在两个所述纵梁(3)之前等间距焊接有十组,且采用120×50×5的矩形管,用于承载及输送机器人本体。
5.根据权利要求1所述的一种喷涂加工输送线专用滑撬,其特征在于:所述底板连接角钢(4)的两边分别焊接于纵梁(3)的内侧和底板支撑弯折板(5)的一侧用以加固纵梁(3)和底板支撑弯折板(5)的连接,且底板连接角钢(4)在每一个所述底板支撑弯折板(5)的两端对称设置,所述底板连接角钢(4)的内部贯通开设有与螺栓螺母(2)相适配的螺孔,用以稳定连接机器人本体和滑撬底板(1)。
技术总结
本技术公开了一种喷涂加工输送线专用滑撬,涉及机器人本体喷涂生产线及其自动化装配作业输送线技术领域,包括机器人本体、滚床和滑撬底板,所述滑撬底板安装于滚床的上表面,且机器人本体等间距分布于滑撬底板的上表面,优化了传统的手推台车作为载具移动机器人本体的方式,通过操作人员将未装的机器人本体吊装至专用滑撬的上方底板上,输送到机器人本体喷涂工位后自动停止,然后进行喷涂作业,专用滑撬带着机器人本体自动运行到机器人烘干房进行烘干,机器人烘干完成后,自动运行到下件工位,进行下件,相较于传统的手推台车方式省时省力且更具稳定性,同时机械化的传输方式能够与自动喷涂进程精准衔接,产能高,符合智能化输送加工理念。
技术研发人员:王小秋,陶瑞青,占海峰,周其虎
受保护的技术使用者:安徽埃特智能装备有限公司
技术研发日:20230512
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!