一种基于芯光线共晶过程的液压式点胶控制结构的制作方法
本技术涉及芯片封装,更具体地说,它涉及一种基于芯光线共晶过程的液压式点胶控制结构。
背景技术:
1、近年来生产制造技术高速发展,对于电子元器件的需求也不断提高,其生产规模也在快速增长。与此同时电子元器件向着精密化、微小化的趋势发展,原来传统的人工生产已经逐渐满足不了现代化生产线对于精度和速度的要求了。点胶固化作为电子封装产业必不可少的一环,也得到了快速发展。在电子封装产业中,点胶固化的质量直接影响产品质量的优劣,而点胶固化的质量也受到了诸多因素的影响,这些因素使得点胶固化质量难以得到保证。因此,为了能够提高电子封装产业的产品质量与生产效率,一套稳定性好,速度快的点胶固化系统是必不可少的。
2、目前企业中的led芯片固晶点胶一体式全自动机稳定性差、产能低、且产品良率不高;除此之外,该led芯片固晶点胶一体式全自动机并不适合本专利将要应用的设备,即柔性倒装led芯光线设备。因此现需对该设备进行系统性优化与改造。
3、所以,基于上述问题,申请人发明了一种基于芯光线共晶过程的液压式点胶控制结构。
技术实现思路
1、本实用新型的目的是提供一种基于芯光线共晶过程的液压式点胶控制结构,该装置通过液压马达精密控制凸轮结构来控制点胶针筒竖直升降运动,同时采用多个可活动的点胶针筒来加快点胶速率,实现对led芯片的点胶。
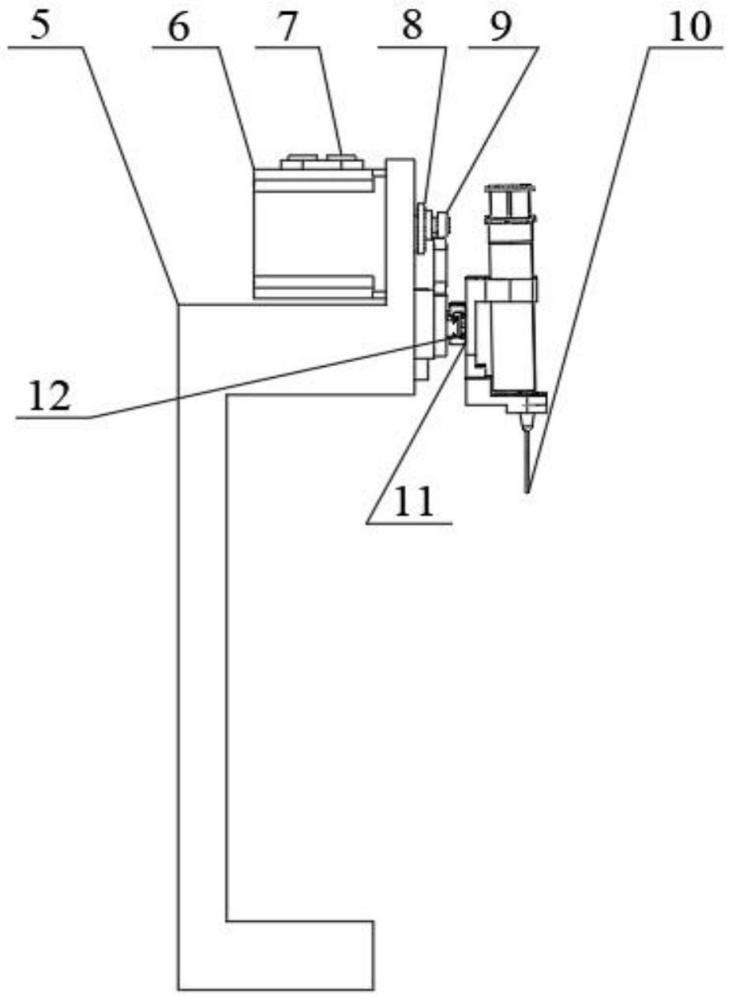
2、本实用新型的上述技术目的是通过以下技术方案得以实现的:一种基于芯光线共晶过程的液压式点胶控制结构,包括马达支架,所述马达支架侧壁沿竖直方向开有凹槽,所述马达支架端部固定设有液压马达,所述液压马达驱动端穿过马达支架固定连接有凸轮结构;所述马达支架侧壁设有竖直升降机构,所述竖直升降机构远离马达支架的侧壁固定有点胶支架,所述点胶支架顶部与凸轮结构贴合,所述点胶支架远离马达支架的侧壁设有水平传动机构,所述水平传动机构上固定有多个点胶针筒;
3、所述凸轮结构包括偏心轴和滚动轴承,所述滚动轴承固定套接在偏心轴上,所述滚动轴承底部侧壁与点胶支架贴合,所述偏心轴远离滚动轴承的端面与液压马达的驱动端固定连接。
4、进一步地,所述竖直升降机构包括弹簧、两个竖直导轨、和两个第一滑块,两个所述竖直导轨与马达支架的侧壁固定连接,所述凹槽位于两个竖直导轨之间,两个所述第一滑块分别与两个竖直导轨滑动连接,两个所述第一滑块远离竖直导轨的侧壁与点胶支架固定连接,所述弹簧端部固定在凹槽内部的弹簧装配孔,所述弹簧远离凹槽的端部固定在点胶支架的弹簧装配孔。
5、进一步地,所述水平传动机构包括水平导轨、多个第二滑块、多个限位器和多个点胶针筒固定架,所述水平导轨与多个点胶支架固定连接,多个所述第二滑块与水平导轨滑动连接,多个所述第二滑块远离水平导轨的侧壁分别与多个限位器固定连接,且所述多个限位器均与水平导轨滑动连接,多个所述限位器远离第二滑块的侧壁分别与多个点胶针筒固定架连接,多个所示点胶针筒分别固定在点胶针筒固定架上。
6、进一步地,所述偏心轴的推程为h=8mm,偏心轴与液压马达轴两轴间距的中心距为4mm,滚动轴承外径为d=11mm。
7、与现有技术相比,本实用新型具有以下有益效果:
8、1.与传统的电机控制相比,在处于对等的输出功率情况下,液压的传动装置因为在体积上比较小,且重量又非常轻便,因此运动的惯量较小,所以整个动态的功用会更好,即便是在运转的过程中,还是可以有效的完成大范围的无机的调速。此外,可以有效的进行无空隙的传动,以此保证整个运动的平稳性;
9、2.采用偏心轴结构,控制精度高,同时偏心轴运动规律属于三角函数运动规律,使得从动件的加速度并没有明显的突变,速度变化也不会太过剧烈,因此该凸轮机构只会受到少量的柔性冲击,而无刚性冲击;此外,依据机械原理知识,使用偏心轴传动是属于平底从动件的形式,平底从动件在接触面形成油膜,受力平稳,效率高,常用于高速场合。总之,使用偏心轴能够提高点胶设备在点胶过程的稳定性,也保证了点胶产品的良品率;
10、3.采用了多点胶针筒同时点胶的结构设计,与传统的单点胶针筒相比能够极大提高点胶的速率,提高产品产能;同时点胶针筒通过点胶导轨机构进行水平方向的横移来适应不同的芯片间隔,以实现制造的产品种类多样化。
技术特征:
1.一种基于芯光线共晶过程的液压式点胶控制结构,包括马达支架(5),所述马达支架(5)侧壁沿竖直方向开有凹槽(17),其特征是:所述马达支架(5)端部固定设有液压马达(6),所述液压马达(6)驱动端穿过马达支架(5)固定连接有凸轮结构;所述马达支架(5)侧壁设有竖直升降机构,所述竖直升降机构远离马达支架(5)的侧壁固定有点胶支架(2),所述点胶支架(2)顶部与凸轮结构贴合,所述点胶支架(2)远离马达支架(5)的侧壁设有水平传动机构,所述水平传动机构上固定有多个点胶针筒(3);
2.根据权利要求1所述的一种基于芯光线共晶过程的液压式点胶控制结构,其特征是:所述竖直升降机构包括弹簧(15)、两个竖直导轨(13)、和两个第一滑块(14),两个所述竖直导轨(13)与马达支架(5)的侧壁固定连接,所述凹槽(17)位于两个竖直导轨(13)之间,两个所述第一滑块(14)分别与两个竖直导轨(13)滑动连接,两个所述第一滑块(14)远离竖直导轨(13)的侧壁与点胶支架(2)固定连接,所述弹簧(15)端部固定在凹槽(17)内部的弹簧装配孔(16),所述弹簧(15)远离凹槽(17)的端部固定在点胶支架(2)的弹簧装配孔(16)。
3.根据权利要求1所述的一种基于芯光线共晶过程的液压式点胶控制结构,其特征是:所述水平传动机构包括水平导轨(1)、多个第二滑块(11)、多个限位器(12)和多个点胶针筒固定架(4),所述水平导轨(1)与多个点胶支架(2)固定连接,多个所述第二滑块(11)与水平导轨(1)滑动连接,多个所述第二滑块(11)远离水平导轨(1)的侧壁分别与多个限位器(12)固定连接,且所述多个限位器(12)均与水平导轨(1)滑动连接,多个所述限位器(12)远离第二滑块(11)的侧壁分别与多个点胶针筒固定架(4)连接,多个所示点胶针筒(3)分别固定在点胶针筒固定架(4)上。
4.根据权利要求1所述的一种基于芯光线共晶过程的液压式点胶控制结构,其特征是:所述偏心轴(8)的推程为h=8mm,偏心轴(8)与液压马达(6)轴两轴间距的中心距为4mm,滚动轴承(9)外径为d=11mm。
技术总结
本技术公开了一种基于芯光线共晶过程的液压式点胶控制结构,涉及芯片封装技术领域,其技术方案要点是:包括马达支架,所述马达支架侧壁沿竖直方向开有凹槽,其特征是:所述马达支架端部固定设有液压马达,所述液压马达驱动端穿过马达支架固定连接有凸轮结构;所述马达支架侧壁设有竖直升降机构,所述竖直升降机构远离马达支架的侧壁固定有点胶支架,所述点胶支架顶部与凸轮结构贴合,所述点胶支架远离马达支架的侧壁设有水平传动机构,所述水平传动机构上固定有多个点胶针筒:该装置通过液压马达精密控制凸轮结构来控制点胶针筒竖直升降运动,同时采用多个可活动的点胶针筒来加快点胶速率,实现对LED芯片的点胶。
技术研发人员:罗升,梁婷婷,陈少滨,吴涛,罗泊麟,陈华,陈文桦,李钦晖,黄栩,朱家豪,刘勇杰,梁玉宁,毛忠发,叶玮琳,陈家铭,莫光寿
受保护的技术使用者:汕头市品冠光电科技有限公司
技术研发日:20230602
技术公布日:2024/3/12
- 还没有人留言评论。精彩留言会获得点赞!