多角度旋转的机器人喷雾清洗器的制作方法
本技术涉及清洗机器人,具体为多角度旋转的机器人喷雾清洗器。
背景技术:
1、清洗机器人是一种可以进行程序控制工作的设施,其能够在主体的程序控制下通过驱动轮进行移动,并可以利用红外感应器进行避开障碍物,使刷子接触到淋湿的需要清洗的位置处,并利用转动的刷子实现清洗工作,但传统的装置没有可以方便进行多角度清洗的设施,比较麻烦。
2、公开号为cn217664896u的专利公开了一种可进行多角度清洗的清洗机器人,包括主体,所述主体的底部安装有驱动轮,所述主体的正面和背面通过轴承安装有转杆,所述主体的一侧安装有双头马达,靠近右侧的所述驱动轮的两两之间安装有一组支撑杆,所述主体的顶部安装有顶罩,本实用新型通过安装有支撑杆,工作人员可以在支撑杆和旋杆的支撑下控制电动杆伸长到合适长度,电动杆会在外力和支撑杆与支板的支撑下以旋杆和旋转杆为圆心转动,使撑柱可以在外力的作用下通过连杆和连接块带动支杆和转杆以转杆外侧安装的轴承为圆心根据电动杆的伸长长度逆时针转动到相应角度处,从而使撑柱在电动杆、支板和旋转杆的支撑下通过撑杆稳固支撑其一侧安装的所有装置在该角度处。
3、上述现有技术在具体使用过程中,只能通过电动杆带动刷子上下移动,并且刷子在上下移动时还会呈弧形轨迹移动,当需要刷子对待清洗面进行上下清洗时,驱动轮还需要配合电动杆进行位置调节才行,当需要对另一侧待清洗面进行清洗时,需要改清洗机器人整体转向才能完成,因此,上述现有技术在实际使用时存在很大的不便性,鉴于此,我们提出多角度旋转的机器人喷雾清洗器。
技术实现思路
1、本实用新型的目的在于提供多角度旋转的机器人喷雾清洗器,以解决上述背景技术中提出的问题。
2、为实现上述目的,本实用新型提供如下技术方案:
3、多角度旋转的机器人喷雾清洗器,包括机器人车体,机器人车体内设有供电设备和控制器,所述机器人车体的底部设有四个麦克纳姆轮,采用麦克纳姆轮可以有效提高该清洗机器人的灵活性;
4、所述机器人车体的顶部设有储液箱,用于储存清洗液,所述储液箱顶部的中部转动连接有齿轮盘,所述齿轮盘的顶部设有u形固定板,所述u形固定板的顶部设有固定立柱,通过齿轮盘带动u形固定板和固定立柱同步转动,实现刷子的水平角度调节,在机器人车体不调整位置的情况下以适应不同的待清洗面;
5、所述固定立柱的左侧开设有条形滑槽,所述条形滑槽内滑动连接有可上下调节的移动块,所述移动块左侧的中部设有电动伸缩杆,所述电动伸缩杆活动杆的端部固定连接有驱动箱,所述驱动箱的左侧转动连接有u形活动板,所述u形活动板内壁右侧的中部设有安装座,所述安装座的左侧设有双头电机,所述双头电机转轴的前后两端均同轴连接有刷子,通过移动块可以带动刷子上下移动,有利于刷子进行上下清洗,通过电动伸缩杆可以调整刷子与固定立柱之间的距离,提高刷子可延伸的范围,u形活动板可以转动角度,从而调整刷子的倾斜角度,以适应不同的待清洗面,通过双头电机驱动两个刷子转动,从而使刷子对待清洗面进行多角度且有效的刷洗;
6、所述安装座的顶部设有喷液管,所述喷液管外壁的左端设有多个呈前后等距排布的雾化喷头,所述喷液管外壁右端的中部设有连接管,所述储液箱的顶部且靠近前侧左端的位置设有水泵,所述水泵的输入端通过抽液管与储液箱连通,所述水泵的输出端通过导液管与连接管连通,水泵将储液箱内的清洗液输送至喷液管内,并从多个雾化喷头喷出,可以先将清洗液喷洒在待清洗面上,有利于刷子清洗。
7、优选的,所述机器人车体的底部设有两个呈前后对称设置的固定板,两个所述固定板的相对侧面且靠近左右两端的位置均设有驱动电机,四个所述驱动电机输出轴的端部均贯穿固定板的侧面,且四个所述驱动电机输出轴的端部分别与四个麦克纳姆轮的转轴同轴连接,通过四个驱动电机分别驱动四个麦克纳姆轮转动。
8、优选的,所述储液箱的顶部且靠近右侧的位置设有注液管,所述储液箱右侧的底部设有排液管,所述注液管和排液管的端部均螺纹连接有可拆卸的密封盖,通过注液管向储液箱内添加清洗液,通过排液管将储液箱内未使用完的清洗液排出。
9、优选的,所述储液箱的左侧设有摄像头,所述储液箱的顶部且靠近左侧前后两端的位置均设有激光雷达,激光雷达和摄像头是激光雷达导航和视觉导航的外置部件,关于机器人的激光雷达导航和视觉导航技术均为现有成熟技术,在此不再赘述。
10、优选的,所述储液箱的顶部设有l形支架,所述l形支架的顶部通过安装板设有第二伺服电机,所述第二伺服电机输出轴的端部穿过l形支架的顶部且同轴连接有驱动齿轮,所述驱动齿轮与齿轮盘啮合传动,通过第二伺服电机带动驱动齿轮转动,驱动齿轮带动齿轮盘转动,从而调整刷子的水平角度。
11、优选的,所述条形滑槽内竖直转动连接有丝杆,所述移动块螺纹连接于丝杆的外壁,所述u形固定板内壁的顶部通过安装板设有第一伺服电机,所述第一伺服电机输出轴的端部穿过u形固定板内壁的顶部且与丝杆的底端同轴连接,通过第一伺服电机驱动丝杆转动,通过丝杆驱动移动块向上或向下移动,从而调整刷子的高度,也可以带动刷子进行上下清洗操作。
12、优选的,所述移动块的左侧设有两个呈上下对称设置的固定管,所述驱动箱的右侧设有两个固定杆,两个所述固定杆分别滑动连接于两个固定管内,有利于驱动箱被电动伸缩杆稳定推动。
13、优选的,所述驱动箱内设有第三伺服电机、蜗杆和蜗轮,所述第三伺服电机输出轴的端部与蜗杆同轴连接,所述蜗杆与蜗轮啮合传动,所述蜗轮转轴的一端穿过驱动箱内壁的左侧且与u形活动板转轴的右端同轴连接,第三伺服电机驱动蜗杆转动,蜗杆带动蜗轮转动,从而蜗轮带动u形活动板转动,采用蜗杆和蜗轮可以使u形活动板在转动后保持固定,从而使刷子的倾斜角度在调整后可以固定。
14、与现有技术相比,本实用新型的有益效果是:
15、1、该多角度旋转的机器人喷雾清洗器,通过第二伺服电机带动驱动齿轮转动,驱动齿轮带动齿轮盘转动,通过齿轮盘带动u形固定板和固定立柱同步转动,实现刷子的水平角度调节,在机器人车体不调整位置的情况下以适应不同的待清洗面。
16、2、通过移动块可以带动刷子上下移动,有利于刷子进行上下清洗,通过电动伸缩杆可以调整刷子与固定立柱之间的距离,提高刷子可延伸的范围,u形活动板可以转动角度,从而调整刷子的倾斜角度,以适应不同待清洗面的清洗角度,通过双头电机驱动两个刷子转动,从而使刷子对待清洗面进行多角度且有效的刷洗。
17、3、通过水泵将储液箱内的清洗液输送至喷液管内,并从多个雾化喷头喷出,可以先将清洗液喷洒在待清洗面上,有利于刷子清洗。
技术特征:
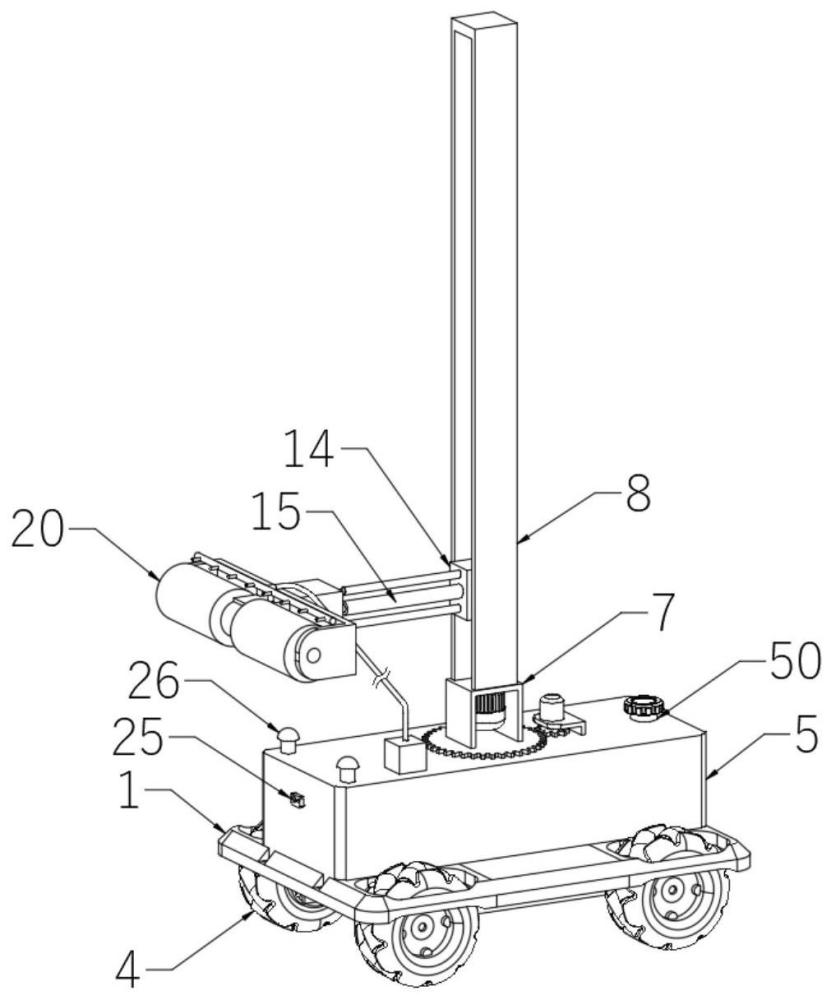
1.多角度旋转的机器人喷雾清洗器,包括机器人车体(1),所述机器人车体(1)的底部设有四个麦克纳姆轮(4),其特征在于:所述机器人车体(1)的顶部设有储液箱(5),所述储液箱(5)顶部的中部转动连接有齿轮盘(6),所述齿轮盘(6)的顶部设有u形固定板(7),所述u形固定板(7)的顶部设有固定立柱(8),所述固定立柱(8)的左侧开设有条形滑槽(80),所述条形滑槽(80)内滑动连接有可上下调节的移动块(14),所述移动块(14)左侧的中部设有电动伸缩杆(15),所述电动伸缩杆(15)活动杆的端部固定连接有驱动箱(16),所述驱动箱(16)的左侧转动连接有u形活动板(17),所述u形活动板(17)内壁右侧的中部设有安装座(18),所述安装座(18)的左侧设有双头电机(19),所述双头电机(19)转轴的前后两端均同轴连接有刷子(20),所述安装座(18)的顶部设有喷液管(23),所述喷液管(23)外壁的左端设有多个呈前后等距排布的雾化喷头(231),所述喷液管(23)外壁右端的中部设有连接管(230),所述储液箱(5)的顶部且靠近前侧左端的位置设有水泵(22),所述水泵(22)的输入端通过抽液管与储液箱(5)连通,所述水泵(22)的输出端通过导液管(24)与连接管(230)连通。
2.根据权利要求1所述的多角度旋转的机器人喷雾清洗器,其特征在于:所述机器人车体(1)的底部设有两个呈前后对称设置的固定板(2),两个所述固定板(2)的相对侧面且靠近左右两端的位置均设有驱动电机(3),四个所述驱动电机(3)输出轴的端部均贯穿固定板(2)的侧面,且四个所述驱动电机(3)输出轴的端部分别与四个麦克纳姆轮(4)的转轴同轴连接。
3.根据权利要求1所述的多角度旋转的机器人喷雾清洗器,其特征在于:所述储液箱(5)的顶部且靠近右侧的位置设有注液管(50),所述储液箱(5)右侧的底部设有排液管(51),所述注液管(50)和排液管(51)的端部均螺纹连接有可拆卸的密封盖。
4.根据权利要求1所述的多角度旋转的机器人喷雾清洗器,其特征在于:所述储液箱(5)的左侧设有摄像头(25),所述储液箱(5)的顶部且靠近左侧前后两端的位置均设有激光雷达(26)。
5.根据权利要求1所述的多角度旋转的机器人喷雾清洗器,其特征在于:所述储液箱(5)的顶部设有l形支架(11),所述l形支架(11)的顶部通过安装板设有第二伺服电机(12),所述第二伺服电机(12)输出轴的端部穿过l形支架(11)的顶部且同轴连接有驱动齿轮(13),所述驱动齿轮(13)与齿轮盘(6)啮合传动。
6.根据权利要求1所述的多角度旋转的机器人喷雾清洗器,其特征在于:所述条形滑槽(80)内竖直转动连接有丝杆(9),所述移动块(14)螺纹连接于丝杆(9)的外壁,所述u形固定板(7)内壁的顶部通过安装板设有第一伺服电机(10),所述第一伺服电机(10)输出轴的端部穿过u形固定板(7)内壁的顶部且与丝杆(9)的底端同轴连接。
7.根据权利要求1所述的多角度旋转的机器人喷雾清洗器,其特征在于:所述移动块(14)的左侧设有两个呈上下对称设置的固定管(140),所述驱动箱(16)的右侧设有两个固定杆(160),两个所述固定杆(160)分别滑动连接于两个固定管(140)内。
8.根据权利要求1所述的多角度旋转的机器人喷雾清洗器,其特征在于:所述驱动箱(16)内设有第三伺服电机(21)、蜗杆和蜗轮,所述第三伺服电机(21)输出轴的端部与蜗杆同轴连接,所述蜗杆与蜗轮啮合传动,所述蜗轮转轴的一端穿过驱动箱(16)内壁的左侧且与u形活动板(17)转轴的右端同轴连接。
技术总结
本技术涉及清洗机器人技术领域,具体为多角度旋转的机器人喷雾清洗器,包括机器人车体,机器人车体的顶部设有储液箱,储液箱顶部转动连接有齿轮盘,齿轮盘的顶部设有U形固定板,U形固定板的顶部设有固定立柱,固定立柱的左侧滑动连接有移动块,移动块左侧设有电动伸缩杆,电动伸缩杆活动杆的端部设有驱动箱,驱动箱的左侧转动连接有U形活动板,U形活动板内连接有刷子。该多角度旋转的机器人喷雾清洗器,通过齿轮盘带动U形固定板和固定立柱同步转动,实现刷子的水平角度调节,通过移动块可以带动刷子上下移动,有利于刷子进行上下清洗,U形活动板可以转动角度,从而调整刷子的倾斜角度,以适应不同待清洗面的清洗角度。
技术研发人员:杜宇芳,关雷,肖亮
受保护的技术使用者:黑龙江省网络空间研究中心(黑龙江省信息安全测评中心、黑龙江省国防科学技术研究院)
技术研发日:20230913
技术公布日:2024/6/18
- 还没有人留言评论。精彩留言会获得点赞!