一种步进式车身喷涂方法与流程
本发明涉及车身喷涂领域,尤其涉及一种步进式车身喷涂方法。
背景技术:
1、鉴于生产工艺变更需求,目前一线车身套色工位大部分需要将传统的人工喷涂方式升级为机器人喷涂方式;然而,为了进一步提高喷涂效率,如今现有的大部分喷涂机器人在进行喷涂过程中均是采用连续式喷涂方式,即,使流水传送带带动车身移动,处于工位上的喷涂机器人会随着汽车的移动给汽车进行喷涂,直至传送带将汽车带出喷涂工位,并正好完成汽车的喷涂工作;然而,这样的喷涂方式虽然能够在一定程度上提高车身进出工位和喷涂的效率,但是也存在一定的局限性,比如需要足够长的喷涂工位,需要更大的工位空间,并且在喷涂过程中,若传送带速度太快,会容易使机器人的喷涂节拍无法适应,导致车身喷涂不到位情况出现,若传送带速度太慢,则又容易影响车身进出喷涂室工位的效率,进而影车身喷涂的整体工作效率。
技术实现思路
1、本发明提供了一种步进式车身喷涂方法,能够降低工位长度需求,提高待喷涂车身的整体喷涂工作效率,加快后续工序流程的进度。
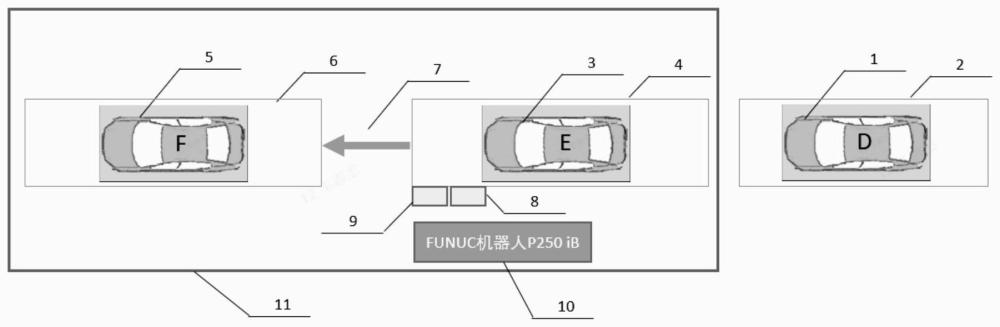
2、本发明提供了一种步进式车身喷涂方法,所述方法作用于车身喷涂系统,所述系统包括:若干滑橇、滑橇控制器、喷涂机器人以及编码器;每一所述滑橇运载一待喷涂车身;
3、所述方法包括:
4、对喷涂室外的预备喷涂工位进行检测,在检测到所述预备喷涂工位上不存在滑橇的情况下,通过滑橇控制器将一运载有喷涂车身的选定滑橇,移动至所述预备喷涂工位,通过编码器生成对应待喷涂车身的工作号,并在所述选定滑橇移动至喷涂室中的第一喷涂工位后,将所述工作号发送至所述喷涂机器人;
5、在通过编码器生成对应待喷涂车身的工作号后,对喷涂室中的第一喷涂工位进行检测,在检测到所述第一喷涂工位上没有滑橇时,通过滑橇控制器控制所述选定滑橇移动至所述第一喷涂工位,并通过所述喷涂机器人,在获取所述工作号后,根据所述工作号,对所述待喷涂车身进行喷涂;
6、在所述喷涂机器人完成对所述待喷涂车身的喷涂后,对喷涂室中的第二喷涂工位进行检测,在检测到所述第二喷涂工位上没有滑橇时,通过滑橇控制器控制所述选定滑橇移动至所述第二喷涂工位,以检查所述选定滑橇上的待喷涂车身是否完成喷涂,并在确认完成喷涂后控制所述选定滑橇移出所述喷涂室。
7、进一步地,所述喷涂机器人,包括:喷涂机器人本体以及雾化器;所述工作号包括:车型、颜色以及套色号信息;
8、所述雾化器设置于所述喷涂机器人本体的一端;
9、在通过所述喷涂机器人,根据所述工作号,对所述待喷涂车身进行喷涂时,通过控制所述喷涂机器人本体的移动,带动所述雾化器对处于所述第一喷涂工位上的待喷涂车身进行喷涂。
10、进一步地,所述喷涂机器人,还包括:雾化器喷涂控制柜以及机器人本体系统控制柜;
11、在所述编码器将所述工作号发送至所述喷涂机器人后,通过所述机器人本体系统控制柜以及所述雾化器喷涂控制柜,获取所述编码器发出的工作号;
12、在通过所述喷涂机器人,根据所述工作号,对所述待喷涂车身进行喷涂时,通过所述机器人本体系统控制柜,根据所述工作号,对所述喷涂机器人本体中各轴的动作进行控制;以及通过所述雾化器喷涂控制柜,并根据所述工作号,控制所述雾化器的喷涂工艺参数。
13、进一步地,所述通过编码器生成对应待喷涂车身的工作号,并在所述选定滑橇移动至喷涂室中的第一喷涂工位后,将所述工作号发送至所述喷涂机器人,包括:
14、所述通过编码器生成对应待喷涂车身的工作号,并存储于预设的预备喷涂队列;
15、在所述选定滑橇移动至喷涂室中的第一喷涂工位后,将存储于所述预备喷涂队列的工作号存储至预设的喷涂工作队列,并将存储于所述喷涂工作队列的工作号发送至所述喷涂机器人。
16、进一步地,在所述喷涂机器人完成对所述待喷涂车身的喷涂后,还包括:
17、通过所述喷涂机器人,向所述编码器发送完成信号;
18、以使所述编码器,在接收到所述完成信号后,将存储于所述喷涂工作队列的工作号存储至预设的喷涂检查队列。
19、进一步地,所述在确认完成喷涂后控制所述选定滑橇移出所述喷涂室,包括:
20、在确认完成喷涂后,通过所述滑橇控制器,在接收到检查完成指令或者到达预设时间后,控制所述选定滑橇移出所述喷涂室。
21、进一步地,所述编码器,通过profibus dp总线将所述工作号发送至所述喷涂机器人。
22、本发明的实施例,具有如下有益效果:
23、本发明提供了一种步进式车身喷涂方法,所述方法作用于车身喷涂系统,所述系统包括:滑橇、滑橇控制器、喷涂机器人以及编码器;本发明方法通过利用各个独立移动的滑橇运载待喷涂车身,可以加快待喷涂车身进出喷涂室速度的同时,各相互之间不会产生影响,即滑橇进出喷涂室时可以加快移动速度,不会影响前方和后方的滑橇的移动,在滑橇进入第一喷涂工位后,可以停止移动进行喷涂,而第二喷涂工位中的滑橇在完成检查后,可以滑橇不需要等待处于第一喷涂工位的滑橇,而可以独立地将检查完成的车身快速送出喷涂室,加快后续的工序流程,还能在一定程度上避免了后续出现过量堆积问题,因此,通过实施本发明,除了能够使待喷涂车身停在工位上进行喷涂,降低工位长度需求以外,还能加快待喷涂车身进出喷涂室工位的速度,提高待喷涂车身的整体喷涂工作效率,在一定程度上加快了后续的工序流程的进度。
技术特征:
1.一种步进式车身喷涂方法,其特征在于,所述方法作用于车身喷涂系统,所述系统包括:若干滑橇、滑橇控制器、喷涂机器人以及编码器;每一所述滑橇运载一待喷涂车身;
2.如权利要求1所述的步进式车身喷涂方法,其特征在于,所述喷涂机器人,包括:喷涂机器人本体以及雾化器;所述工作号包括:车型、颜色以及套色号信息;
3.如权利要求2所述的步进式车身喷涂方法,其特征在于,所述喷涂机器人,还包括:雾化器喷涂控制柜以及机器人本体系统控制柜;
4.如权利要求3所述的步进式车身喷涂方法,其特征在于,所述通过编码器生成对应待喷涂车身的工作号,并在所述选定滑橇移动至喷涂室中的第一喷涂工位后,将所述工作号发送至所述喷涂机器人,包括:
5.如权利要求4所述的步进式车身喷涂方法,其特征在于,在所述喷涂机器人完成对所述待喷涂车身的喷涂后,还包括:
6.如权利要求5所述的步进式车身喷涂方法,其特征在于,所述在确认完成喷涂后控制所述选定滑橇移出所述喷涂室,包括:
7.如权利要求6所述的步进式车身喷涂方法,其特征在于,所述编码器,通过profibusdp总线将所述工作号发送至所述喷涂机器人。
技术总结
本发明公开了一种步进式车身喷涂方法,所述方法作用于车身喷涂系统,所述系统包括:若干滑橇、滑橇控制器、喷涂机器人以及编码器;所述方法包括:在选定滑橇处于喷涂室外的预备喷涂工位时,通过编码器生成待喷涂车身的工作号;之后再通过滑橇控制器控制选定滑橇移动至第一喷涂工位;喷涂机器人根据生成工作号对待喷涂车身进行喷涂;在喷涂机器人完成喷涂后,再通过滑橇控制器控制选定滑橇移动至喷涂室中的第二喷涂工位,以检查所述待喷涂车身是否完成喷涂,并在检查无误后控制选定滑橇移出所述喷涂室。通过实施本发明,能够降低工位长度需求,提高待喷涂车身的整体喷涂工作效率,加快后续工序流程的进度。
技术研发人员:韦志杰,覃培兴,梁怡,杨勇杰,石永亮,彭青松,吕林俊,张清幸,赖炳新,李玉虎
受保护的技术使用者:东风柳州汽车有限公司
技术研发日:
技术公布日:2024/3/24
- 还没有人留言评论。精彩留言会获得点赞!