涂胶方法、装置、设备及介质与流程
本申请涉及自动化控制,更具体地,涉及一种涂胶方法、涂胶装置、电子设备及计算机可读存储介质。
背景技术:
1、产品涂胶成为产品封装过程中必不可少的一个工序。目前,多使用单结构光3d相机视觉引导系统来实现对产品的涂胶。
2、对于大体积产品来说,单结构光3d相机视觉引导系统需要在多点位拍摄产品、对经多点位拍摄得到的图像采用融合算法融合以及其他处理以得到涂胶路径。
3、但是,多点位拍摄得到的图像,无法保证可覆盖产品的完整胶槽。而这会导致最终得到的涂胶路径准确率低,例如涂胶路径存在重叠和空缺等问题。
技术实现思路
1、本申请的一个目的是提供一种用于涂胶的新技术方案。
2、根据本申请的第一方面,提供了一种涂胶方法,应用于涂胶系统,包括机械手、固定在所述机械手上的至少两台3d相机及胶枪,所述方法包括:
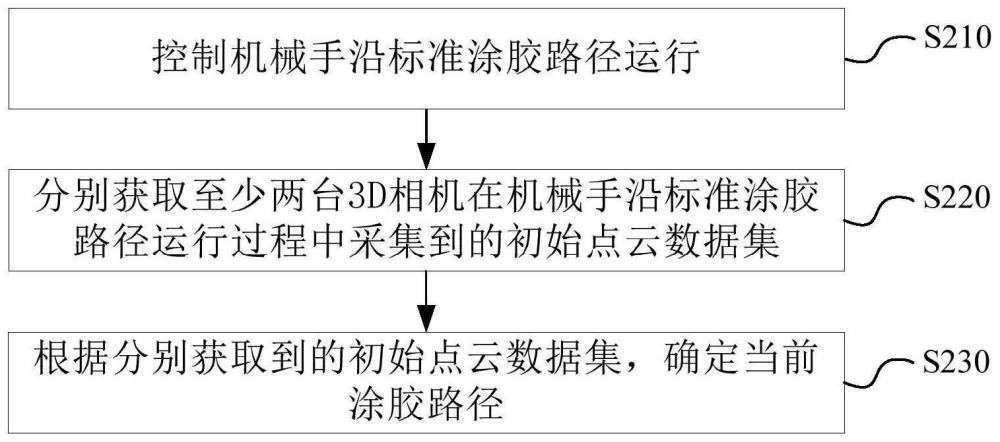
3、控制所述机械手沿标准涂胶路径运行;
4、分别获取所述至少两台3d相机在所述机械手沿所述标准涂胶路径运行过程中采集到的初始点云数据集;
5、根据分别获取到的所述初始点云数据集,确定当前涂胶路径。
6、可选地,所述根据分别获取到的所述初始点云数据集,确定当前涂胶路径,包括:
7、根据分别获取到的所述初始点云数据集,得到基准3d相机坐标系下的融合点云数据集;
8、从所述融合点云数据集当中提取出属于胶槽轨迹的点云数据,得到当前胶槽点云数据集;
9、按照预设映射数据,将所述当前胶槽点云数据集转换为机械手坐标系下的目标点云数据集,所述预设映射数据为反映基准3d相机坐标系与机械手坐标系的对应关系的数据;
10、根据所述目标点云数据集,确定当前涂胶路径。
11、可选地,所述从所述融合点云数据集当中提取出属于胶槽轨迹的点云数据,得到当前胶槽点云数据集,包括:
12、从所述融合点云数据集当中提取出属于胶槽轨迹的点云数据,得到初始胶槽点云数据集;
13、从初始胶槽点云数据集当中,筛选出与标准胶槽点云数据集中点云数据相匹配的点云数据,得到当前胶槽点云数据集。
14、可选地,所述方法在所述从所述融合点云集当中提取出属于胶槽轨迹的点云数据,得到初始胶槽点云数据集之后,还包括:
15、对所述初始胶槽点云数据集执行预处理操作,得到预处理后的初始胶槽点云数据集;
16、将所述初始胶槽点云数据集更新为所述预处理后的初始胶槽点云数据集;
17、其中,所述预处理操作包括除噪、滤波以及降采样中的至少一个。
18、可选地,所述根据所述目标点云数据集,确定当前涂胶路径,包括:
19、根据所述目标点云数据集以及涂胶约束条件,得到当前涂胶路径。
20、可选地,所述方法还包括:
21、在所述机械手沿所述当前涂胶路径运行过程中,获取所述至少两台3d相机当前采集到的第一校验点云数据集;
22、根据所述第一校验点云数据集,确定核验涂胶路径;
23、在所述核验涂胶路径与所述当前涂胶路径不匹配的情况下,控制所述机械手停止运行以及所述胶枪停止出胶。
24、可选地,所述方法还包括:
25、控制所述机械手沿所述当前涂胶路径运行,且在所述机械手沿所述当前涂胶路径运行过程中控制所述胶枪出胶。
26、可选地,所述方法还包括:
27、在所述机械手结束所述当前涂胶路径的运行的情况下,控制机械手重新沿所述当前涂胶路径运行;
28、分别获取所述至少两台3d相机在所述机械手重新沿所述当前涂胶路径运行过程中采集到的检测点云数据集,所述检测点云数据集当中包括所述胶枪出胶在胶槽形成的胶条的点云数据;
29、根据所述检测点云数据集,确定涂胶质量检测结果,所述涂胶质量检测结果中包括所述胶条的几何参数值是否合格、所述胶条表面检测平整度是否合格以及所述胶条是否存在异常中的至少一个。
30、根据本申请的第二方面,提供了一种涂胶装置,应用于涂胶系统,包括机械手、固定在所述机械手上的至少两台3d相机及胶枪,所述装置包括:
31、控制模块,用于控制所述机械手沿标准涂胶路径运行;
32、获取模块,用于分别获取所述至少两台3d相机在所述机械手沿所述标准涂胶路径运行过程中采集到的初始点云数据集;
33、确定模块,用于根据分别获取到的所述初始点云数据集,确定当前涂胶路径。
34、根据本申请的第三方面,提供了一种电子设备,所述电子设备包括如第二方面所述的涂胶装置;
35、或者,所述电子设备包括存储器和处理器,所述存储器用于存储计算机指令,所述处理器用于从所述存储器中调用所述计算机指令,以执行如第一方面中任一项所述的涂胶方法。
36、根据本申请的第三方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序在被处理器执行时实现根据第一方面中任一项所述的涂胶方法。
37、在本申请提供了一种涂胶方法,应用于涂胶系统,包括机械手、固定在机械手上的至少两台3d相机及胶枪,包括:控制机械手沿标准涂胶路径运行;分别获取至少两台3d相机在机械手沿标准涂胶路径运行过程中采集到的初始点云数据集;根据分别获取到的初始点云数据集,确定当前涂胶路径。在本申请中,由于分别获取到的初始点云数据集包含涂胶对象的完整胶槽位置处的点云数据,因此,根据分别获取到的初始点云数据集,则可得到准确的当前涂胶路径。这样,利用至少两台3d相机当前涂胶路径则不在存在重叠或或缺的问题。
38、通过以下参照附图对本申请的示例性实施例的详细描述,本申请的其它特征及其优点将会变得清楚。
技术特征:
1.一种涂胶方法,其特征在于,应用于涂胶系统,包括机械手、固定在所述机械手上的至少两台3d相机及胶枪,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述根据分别获取到的所述初始点云数据集,确定当前涂胶路径,包括:
3.根据权利要求2所述的方法,其特征在于,所述从所述融合点云数据集当中提取出属于胶槽轨迹的点云数据,得到当前胶槽点云数据集,包括:
4.根据权利要求3所述的方法,其特征在于,所述从所述融合点云集当中提取出属于胶槽轨迹的点云数据,得到初始胶槽点云数据集之后,还包括:
5.根据权利要求2所述的方法,其特征在于,所述根据所述目标点云数据集,确定当前涂胶路径,包括:
6.根据权利要求1所述的方法,其特征在于,所述方法还包括:
7.根据权利要求6所述的方法,其特征在于,所述方法还包括:
8.根据权利要求7所述的方法,其特征在于,所述方法还包括:
9.一种涂胶装置,其特征在于,应用于涂胶系统,包括机械手、固定在所述机械手上的至少两台3d相机及胶枪,所述装置包括:
10.一种电子设备,其特征在于,所述电子设备包括如权利要求9所述的涂胶装置;
11.一种计算机可读存储介质,其特征在于,其上存储有计算机程序,所述计算机程序在被处理器执行时实现根据权利要求1-8中任一项所述的涂胶方法。
技术总结
本申请公开了一种涂胶方法、装置、设备及介质,涉及自动化控制技术领域。其中,方法应用于涂胶系统,涂胶系统包括机械手、固定在机械手上的至少两台3D相机及胶枪,方法包括:控制机械手沿标准涂胶路径运行;分别获取至少两台3D相机在机械手沿标准涂胶路径运行过程中采集到的初始点云数据集;根据分别获取到的初始点云数据集,确定当前涂胶路径。基于该方法,可得到准确的当前涂胶路径。
技术研发人员:迟昭娟,李浩博,瞿冠欣,徐锡武
受保护的技术使用者:北歌(潍坊)智能科技有限公司
技术研发日:
技术公布日:2024/8/1
- 还没有人留言评论。精彩留言会获得点赞!