产品质量自动检测系统的制作方法
1.本实用新型涉及产品检测设备领域,具体涉及产品质量自动检测系统。
背景技术:
2.产品零件检测生产线中,是通过测量机来判断产品表面有无凹痕缺陷,或者有无尺寸规格不同的缺陷。
3.而目前的测量机的上料是采用人工上下料,影响测量时间,增加人力成本以及工作量。
技术实现要素:
4.为了克服现有技术中的不足,本实用新型提出的产品质量自动检测系统,其具有自动上下料,减少人力的优点。
5.为了实现上述目的,本实用新型的产品质量自动检测系统,包括上料工装、测量工作台、测量机,检测系统还包括四轴机器人、分拣输送线,四轴机器人安装在测量工作台上,四轴机器人的输出端设置有错位吸附装置,分拣输送线包括并列设置的良品输送线和次品盒,上料工装、测量机以及分拣输送线均在四轴机器人的运行半径内。
6.进一步的,错位吸附装置包括倒“t”字形的连接板,连接板的底部两端分别安装有一个气缸,气缸的活塞杆穿透连接板,并在每个气缸的活塞杆上安装有真空吸盘。
7.进一步的,上料工装包括两个光电开关、呈圆环形分布的产品载具,产品载具与两个光电开关的连线相交。
8.进一步的,良品输送线的侧边设置有滑架,次品盒滑动设置在滑架上。
9.进一步的,四轴机器人的型号为scara四轴机器人。
10.有益效果:通过四轴机器人将产品从上料工装放到测量机位置进行检测,检测后,又将测量机位置的产品按优劣差别分别放到良品输送线和次品盒,减少人力的参与,提高生产效率。
附图说明
11.下面结合附图对本实用新型作进一步描写和阐述。
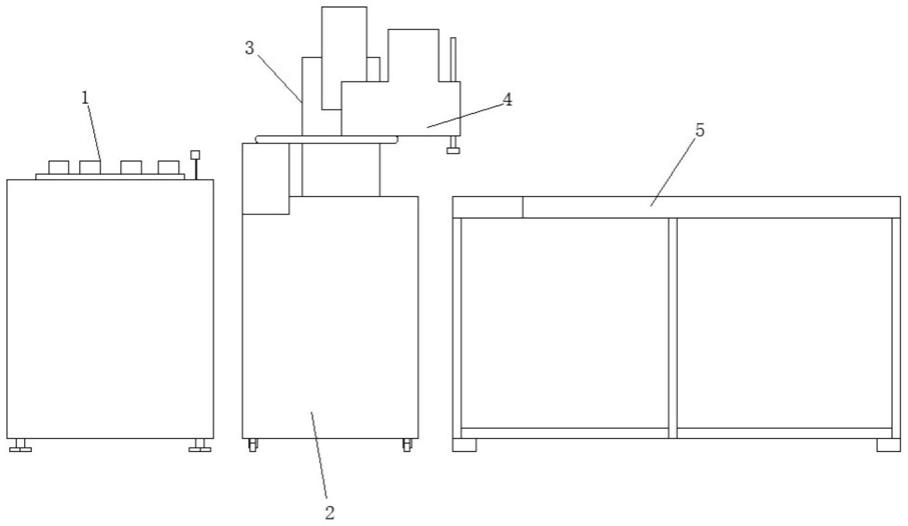
12.图1是本实用新型首选实施方式的整体的结构示意图。
13.图2是上料工装的结构示意图;
14.图3是四轴机器人的结构示意图。
15.附图标记:1、上料工装;2、测量工作台;3、测量机;4、四轴机器人;5、分拣输送线;6、光电开关;7、产品载具;8、连接板;9、气缸;10、真空吸盘;
具体实施方式
16.下面将结合附图、通过对本实用新型的优选实施方式的描述,更加清楚、完整地阐
述本实用新型的技术方案。
17.如图1所示,本实用新型首选实施方式的产品质量自动检测系统,包括上料工装1、测量工作台2、测量机3,四轴机器人4、分拣输送线5。
18.测量机3安装在测量工作台2上,上料工装1、测量机3以及分拣输送线5均在测量机3的工作半径内。
19.四轴机器人4的输出端设置有错位吸附装置,错位吸附装置包括倒“t”字形的连接板8,连接板8的底部两端分别安装有一个气缸9,气缸9的活塞杆向下穿透连接板8,并在每个气缸9的活塞杆上安装有真空吸盘10。四轴机器人4采用scara系列的四轴机器人4。
20.该系统的工作过程为:
21.首先,在测量机3的工作位有一个正在检测的产品,以及在上料工装1上有若干个待检测的产品。四轴机器人4先通过其中一个真空吸盘10,从上料工装1处抓取一个待检测的产品,然后再运动到测量机3位置,利用另外一个真空吸盘10抓取检测后的产品,同时放下待检测的产品至测量机3位置,测量机3给待检测的产品检测,四轴机器人4再将检测后的产品按优劣放入分拣输送线5,如此循环,四轴机器人再重新抓取待检测的产品,并按上述步骤往复进行。
22.其中,两个气缸9单独控制上下移动,可以实现四轴机器人4的单独的上料或者下料。
23.在上料工装1上又设置有两个光电开关6、以及若干个呈圆环形分布的产品载具7,两个光电开关6的连线与产品载具7相交,当产品载具7中有待检测的产品时,待检测的产品就会遮挡光电开关6,光电开关6被遮挡则证明载具上有需检测的产品。
24.前述良品输送线的并列位置设置有滑架,滑架上滑动设置有次品盒,与次品盒并列的是良品输送线,四轴机器人4将良品与劣品分别放到良品输送线和次品盒中,使良品和劣品不混淆。
25.上述具体实施方式仅仅对本实用新型的优选实施方式进行描述,而并非对本实用新型的保护范围进行限定。在不脱离本实用新型设计构思和精神范畴的前提下,本领域的普通技术人员根据本实用新型所提供的文字描述、附图对本实用新型的技术方案所作出的各种变形、替代和改进,均应属于本实用新型的保护范畴。本实用新型的保护范围由权利要求确定。
技术特征:
1.产品质量自动检测系统,包括上料工装、测量工作台、测量机,其特征在于,所述检测系统还包括四轴机器人、分拣输送线,所述四轴机器人安装在测量工作台上,所述四轴机器人的输出端设置有错位吸附装置,所述分拣输送线包括并列设置的良品输送线和次品盒,所述上料工装、测量机以及分拣输送线均在四轴机器人的运行半径内。2.根据权利要求1所述的产品质量自动检测系统,其特征在于,所述错位吸附装置包括倒“t”字形的连接板,所述连接板的底部两端分别安装有一个气缸,所述气缸的活塞杆穿透连接板,并在每个所述气缸的活塞杆上安装有真空吸盘。3.根据权利要求1所述的产品质量自动检测系统,其特征在于,所述上料工装包括两个光电开关、呈圆环形分布的产品载具,所述产品载具与两个光电开关的连线相交。4.根据权利要求1所述的产品质量自动检测系统,其特征在于,所述良品输送线的侧边设置有滑架,所述次品盒滑动设置在滑架上。5.根据权利要求1所述的产品质量自动检测系统,其特征在于,所述四轴机器人的型号为scara四轴机器人。
技术总结
本实用新型的产品质量自动检测系统,包括上料工装、测量工作台、测量机,其特征在于,检测系统还包括四轴机器人、分拣输送线,四轴机器人安装在测量工作台上,四轴机器人的输出端设置有错位吸附装置,分拣输送线包括并列设置的良品输送线和次品盒,上料工装、测量机以及分拣输送线均在四轴机器人的运行半径内。该检测系统具有自动上下料,减少人力的优点。减少人力的优点。减少人力的优点。
技术研发人员:丁程
受保护的技术使用者:适新科技(苏州)有限公司
技术研发日:2020.10.22
技术公布日:2021/11/21
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1