一种自动装盖机构的制作方法
1.本实用新型涉及包装设备技术领域,具体为一种带有自动装盖机构的机械。
背景技术:
2.目前生产中理盖一般靠人工,效率低。目前相关瓶盖的自动机器都不同程度存在磨损现象,瓶盖磨损主要来自于瓶盖和金属机构的相对摩擦,大大限制了机器的推广性。而且机械化程度不高,基本属于半自动。
3.目前市场上都是人工装盖,再配一台设备自动检测胶水是否固化,这样就导致人工装盖效率低下;长期人工成本高;单独设备检测胶水是否固化,设备集成度不高,为了提高设备集成度,降低成本,因此我们需要提出一种自动装盖机构。
技术实现要素:
4.本实用新型的目的在于提供一种自动装盖机构,通过四轴机器人带动ccd感光元件移至接线盒上方,ccd感光元件拍照定位,再通过胶水固化检测模块检测胶水是否固化,合格后四轴机器人根据视觉给的坐标作位置修正,装盖气缸伸出,完成自动装盖,为提高设备集成度,降低成本,兼容性高,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种自动装盖机构,包括四轴机器人,所述四轴机器人的下端设置有自动装盖工装,且所述自动装盖工装包括有装盖模块、视觉引导定位模块和胶水固化检测模块;
6.装盖模块,所述装盖模块包括有固定块、装盖气缸和侧板,所述侧板与固定块的同侧固定安装有若干组装盖气缸,且每组所述装盖气缸的活塞端固定安装有夹板,所述夹板的下端滑动安装有夹块;
7.视觉引导定位模块,所述视觉引导定位模块,所述视觉引导定位模块位于侧板的另一侧,所述侧板的一侧固定安装有ccd感光元件;
8.胶水固化检测模块,所述胶水固化检测模块安装于视觉引导定位模块的一侧,所述胶水固化检测模块包括有胶水固化检测头和滑块固定块,所述滑块固定块的上端滑动安装有胶水固化检测头固定块。
9.优选的,所述装盖模块与视觉引导定位模块固定安装于侧板的两侧。
10.优选的,每组所述夹板的下端均滑动安装有两组夹块,所述夹块呈对称设置。
11.优选的,所述固定块固定安装于侧板的一侧,所述侧板通过固定块螺纹安装于四轴机器人的下端。
12.优选的,所述胶水固化检测头设置有两组,且所述胶水固化检测头呈对称设置。
13.优选的,所述ccd感光元件呈圆形。
14.与现有技术相比,本实用新型的有益效果是:
15.1、本实用新型通过四轴机器人带动ccd感光元件移至接线盒上方,ccd感光元件拍照定位,再通过胶水固化检测模块检测胶水是否固化,合格后四轴机器人根据视觉给的坐
标作位置修正,装盖气缸伸出,完成自动装盖,为提高设备集成度,降低成本,兼容性高。
附图说明
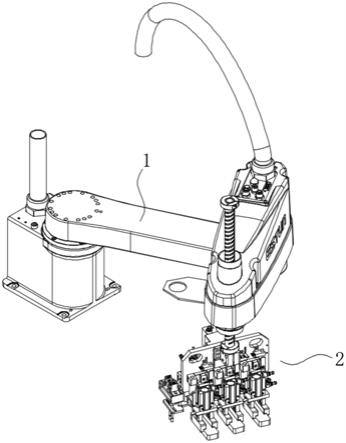
16.图1为本实用新型的结构示意图;
17.图2为本实用新型装盖模块的结构示意图;
18.图3为本实用新型胶水固化检测模块的结构示意图。
19.图中:1、四轴机器人;2、自动装盖工装;3、装盖模块;4、引导定位模块;5、胶水固化检测模块;301、固定块;302、装盖气缸;303、侧板;304、夹板;305、夹块;401、ccd感光元件;501、胶水固化检测头;502、滑块固定块;503、胶水固化检测头固定块。
具体实施方式
20.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
21.请参阅图1
‑
3,本实用新型提供一种技术方案:一种自动装盖机构,包括四轴机器人1,四轴机器人1的下端设置有自动装盖工装2,且自动装盖工装2包括有装盖模块3、视觉引导定位模块4和胶水固化检测模块5,装盖模块3与视觉引导定位模块4固定安装于侧板303的两侧。
22.装盖模块3,装盖模块3包括有固定块301、装盖气缸302和侧板303,固定块301固定安装于侧板303的一侧,侧板303通过固定块301螺纹安装于四轴机器人1的下端,侧板303与固定块301的同侧固定安装有若干组装盖气缸302,且每组装盖气缸302的活塞端固定安装有夹板304,夹板304的下端滑动安装有夹块305,每组夹板304的下端均滑动安装有两组夹块305,夹块305呈对称设置,通过夹块305来夹紧瓶盖,已完成装盖工作;
23.视觉引导定位模块4,视觉引导定位模块4,视觉引导定位模块4位于侧板303的另一侧,侧板303的一侧固定安装有ccd感光元件401,ccd感光元件401呈圆形,通过四轴机器人1带动ccd感光元件401移至接线盒上方,ccd感光元件401拍照定位,再通过胶水固化检测模块5检测胶水是否固化,合格后四轴机器人1根据视觉给的坐标作位置修正,装盖气缸302伸出,完成自动装盖;
24.胶水固化检测模块5,胶水固化检测模块5安装于视觉引导定位模块4的一侧,胶水固化检测模块5包括有胶水固化检测头501和滑块固定块502,滑块固定块502的上端滑动安装有胶水固化检测头固定块503,胶水固化检测头501设置有两组,且胶水固化检测头501呈对称设置。
25.工作原理:本装置通过四轴机器人1带动ccd感光元件401移至接线盒上方,ccd感光元件401拍照定位,再通过胶水固化检测模块5检测胶水是否固化,合格后四轴机器人1根据视觉给的坐标作位置修正,装盖气缸302伸出,完成自动装盖,为提高设备集成度,降低成本,兼容性高,改进后,减少人工,提高设备集成度,设备柔性高,降低成本,使用方便,精度变高,兼容性强。
26.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,
可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
技术特征:
1.一种自动装盖机构,包括四轴机器人(1),其特征在于:所述四轴机器人(1)的下端设置有自动装盖工装(2),且所述自动装盖工装(2)包括有装盖模块(3)、视觉引导定位模块(4)和胶水固化检测模块(5);装盖模块(3),所述装盖模块(3)包括有固定块(301)、装盖气缸(302)和侧板(303),所述侧板(303)与固定块(301)的同侧固定安装有若干组装盖气缸(302),且每组所述装盖气缸(302)的活塞端固定安装有夹板(304),所述夹板(304)的下端滑动安装有夹块(305);视觉引导定位模块(4),所述视觉引导定位模块(4),所述视觉引导定位模块(4)位于侧板(303)的另一侧,所述侧板(303)的一侧固定安装有ccd感光元件(401);胶水固化检测模块(5),所述胶水固化检测模块(5)安装于视觉引导定位模块(4)的一侧,所述胶水固化检测模块(5)包括有胶水固化检测头(501)和滑块固定块(502),所述滑块固定块(502)的上端滑动安装有胶水固化检测头固定块(503)。2.根据权利要求1所述的一种自动装盖机构,其特征在于:所述装盖模块(3)与视觉引导定位模块(4)固定安装于侧板(303)的两侧。3.根据权利要求1所述的一种自动装盖机构,其特征在于:每组所述夹板(304)的下端均滑动安装有两组夹块(305),所述夹块(305)呈对称设置。4.根据权利要求1所述的一种自动装盖机构,其特征在于:所述固定块(301)固定安装于侧板(303)的一侧,所述侧板(303)通过固定块(301)螺纹安装于四轴机器人(1)的下端。5.根据权利要求1所述的一种自动装盖机构,其特征在于:所述胶水固化检测头(501)设置有两组,且所述胶水固化检测头(501)呈对称设置。6.根据权利要求1所述的一种自动装盖机构,其特征在于:所述ccd感光元件(401)呈圆形。
技术总结
本实用新型公开了一种自动装盖机构,包括四轴机器人,四轴机器人的下端设置有自动装盖工装,且自动装盖工装包括有装盖模块、视觉引导定位模块和胶水固化检测模块,装盖模块包括有固定块、装盖气缸和侧板,侧板与固定块的同侧固定安装有若干组装盖气缸,且每组装盖气缸的活塞端固定安装有夹板,夹板的下端滑动安装有夹块,视觉引导定位模块,视觉引导定位模块位于侧板的另一侧,侧板的一侧固定安装有CCD感光元件,通过四轴机器人带动CCD感光元件移至接线盒上方,CCD感光元件拍照定位,再通过胶水固化检测模块检测胶水是否固化,合格后四轴机器人根据视觉给的坐标作位置修正,装盖气缸伸出,完成自动装盖,提高了设备的集成度。提高了设备的集成度。提高了设备的集成度。
技术研发人员:钟海 袁得伟
受保护的技术使用者:苏州库瑞奇自动化有限公司
技术研发日:2020.12.08
技术公布日:2021/9/21
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1