全自动晶圆分选机旋转取料结构的制作方法
1.本实用新型涉及一种全自动晶圆分选机,更具体的说,涉及一种全自动全自动晶圆分选机的取料结构。
背景技术:
2.在现有技术中,晶片分选机需要对通过测试后的不同电子数据晶片进行分选,几百或几千个不同数据的晶片附着于一块基片中,多个基片竖放于一个基片槽中。当前技术具备有自动化的分选设备,但是,由于当前技术中的分选设备存在着固晶结构的精度差的技术问题,在晶片分选时,容易出现行程伸缩过大或过小,并且由于晶片体积细小,不能精确对准晶片进行取晶固定是现有技术中设备存在的技术缺陷,当前取晶片工序的自动化设备存在着精度差的技术缺陷,成为本领域技术人员急待解决的技术问题。
技术实现要素:
3.本实用新型的技术目的是克服现有技术中,取晶片工序存在着精度差、效率低的技术问题;提供一种通过摆臂及吸附结构,定位精确的全自动晶圆分选机旋转取料结构。
4.为实现以上技术目的,本实用新型的技术方案是:
5.全自动晶圆分选机旋转取料结构,包括有旋转电机,所述旋转电机的电机轴上设有一摆臂基座,在所述摆臂机座上设有摆臂,在所述摆臂的上端设有吸嘴,所述吸嘴连通吸放气缸。
6.更进一步的,所述摆臂的一侧设有旋转螺杆套件,所述旋转螺杆套件上设有紧固弹簧。
7.更进一步的,所述摆臂分别设有左摆臂及右摆臂。
8.本实用新型的有益技术效果是:通过旋转电机的精确旋转,可将将摆臂基座及摆臂旋转到准确的工位,通过吸嘴将细小的晶片吸附,可实现精确的取晶片的工序。旋转电机再旋转到准确工位,将晶片释放,进入下一工序。本实用新型旋转角度精确,并且由于采用于在摆臂一侧设置的旋转螺杆套件,通过调节旋转螺杆与固定柱及摆臂相对距离,可微调摆臂的延伸距离,精确而又稳定。
附图说明
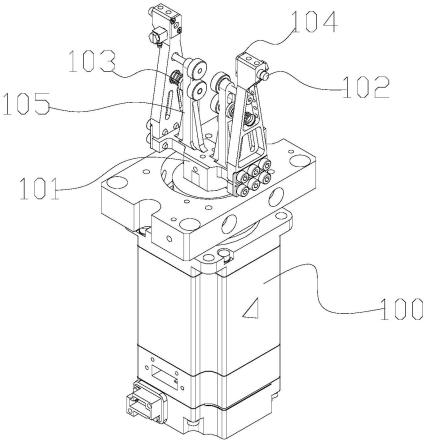
9.图1是本实用新型一个实施例的结构示意图。
具体实施方式
10.结合附图,详细说明本实用新型的具体实施方式,但不对权利要求作任何限定。
11.在本实用新型全自动晶圆分选机旋转取料结构中,包括有旋转电机100,所述旋转电机100的电机轴上设有一摆臂基座101,在所述摆臂机座101上设有摆臂104,在实施时,摆臂104的上端设有吸嘴102,所述吸嘴102连通吸放气缸。摆臂104的一侧设有固定柱105,摆
臂104的一侧设有旋转螺杆套件103,旋转螺杆套件103包括有螺杆及紧固弹簧;旋转螺杆套件103的螺杆穿过固定柱105的螺孔中,在螺杆上设有紧固弹簧,在所述摆臂104上设有与螺杆对应的螺纹孔,通过转动螺杆,可调节旋转螺杆与固定柱及摆臂相对距离,可微调摆臂及其上方吸嘴的延伸距离,旋转螺杆套件103上设有紧固弹簧。
12.本实用新型通过通过吸嘴102将细小的晶片吸附,再收旋转电机100的精确旋转,可将将摆臂基座101及摆臂104带动吸嘴102旋转到准确的工位,实现精确的取晶片的工序。旋转电机100再旋转到准确工位,将晶片释放,进入下一工序。在实施时,摆臂104分别设有左摆臂及右摆臂,左摆臂及右摆臂分别设置有固定柱及旋转螺杆套件,实现180度旋转双向取放芯片。
技术特征:
1.全自动晶圆分选机旋转取料结构,其特征是:包括有旋转电机,所述旋转电机的电机轴上设有一摆臂基座,在所述摆臂机座上设有摆臂,在所述摆臂的上端设有吸嘴,所述吸嘴连通吸放气缸。2.根据权利要求1所述的全自动晶圆分选机旋转取料结构,其特征是:所述摆臂的一侧设有旋转螺杆套件,所述旋转螺杆套件上设有紧固弹簧。3.根据权利要求1所述的全自动晶圆分选机旋转取料结构,其特征是:所述摆臂分别设有左摆臂及右摆臂。
技术总结
本实用新型的技术目的是提供一种通过摆臂及吸附结构,定位精确的全自动晶圆分选机旋转取料结构。包括有旋转电机,所述旋转电机的电机轴上设有一摆臂基座,在所述摆臂机座上设有摆臂,在所述摆臂的上端设有吸嘴,所述吸嘴连通吸放气缸。本实用新型将将摆臂基座及摆臂旋转到准确的工位,通过吸嘴将细小的晶片吸附,可实现精确的取晶片的工序。可微调摆臂的延伸距离,精确而又稳定。适用于晶圆分选机中应用。应用。应用。
技术研发人员:邓朝旭
受保护的技术使用者:深圳市朝阳光科技有限公司
技术研发日:2021.12.24
技术公布日:2022/7/8
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1