一种工作台防撞组件及防撞方法与流程
1.本发明属于分拣搬运设备技术领域,特别提供了一种工作台防撞组件及防撞方法。
背景技术:
2.目前市面上的物料分拣机以自动化控制为主,通常同时设置取料工作台、放料工作台等多个工作台单元,考虑到设备运行正常、软件的逻辑正确情况下,各工作台之间不会发生碰撞,故目前市面上常见的多工作台物料分拣机都没有做工作台防撞的相关设计。但考虑到设备运行时突发性断电或设备老化磨损精度下降等因素,可能出现系统坐标定位不准确的情况,给相邻工作台带来碰撞风险。
技术实现要素:
3.为解决上述问题,本发明提供了一种工作台防撞组件及防撞方法。
4.为实现上述目的,本发明采用的技术方案是:一种工作台防撞组件,包括工作台测距组件、工作台面转动判定组件、工作台面升降判定组件,工作台测距组件设置于轨道与工作台之间,用于检测工作台与轨道一端的距离,工作台面转动判定组件设置于工作台底座与工作台面之间,用于检测工作台面的转动角度,工作台面升降判定组件设置于工作台的底部,用于检测工作台的升降高度。
5.进一步地,所述工作台测距组件包括测距传感器、挡片一、装配架,装配架装配于两个轨道之间,两个测距传感器装配于装配架上,两个挡片一分别装配于两个工作台的里侧,且两个挡片一的位置分别与两个测距传感器位置对应。
6.进一步地,所述工作台面转动判定组件包括光电开关一、挡片二、绝对值编码器一,两个光电开关一以90
°
夹角装配于工作台底座的上表面上,挡片二固定安装于工作台面的底部,能够随工作台面转动,控制工作台面转动的控制电机上装配有绝对值编码器一。
7.进一步地,所述工作台面升降判定组件包括光电开关二、挡片三、绝对值编码器二,光电开关二装配于工作台的底部,挡片三装配于工作台升降导向机构的外侧,控制工作台面升降的控制电机上装配有绝对值编码器二。
8.一种工作台防撞方法,其具体步骤包括:步骤一、读取工作台测距组件的反馈数值,测算两个工作台在轨道上的位置坐标,初步判定两个工作台在横向位置上是否有碰撞风险;步骤二、读取工作台面转动判定组件的反馈数值,测算两个工作台面的当前转动角度,进一步判定两个工作台的转动状态;步骤三、读取工作台面升降判定组件的反馈数值,测算两个工作台的当前高度差,最终判定两个工作台的高度位置,并在发现有碰撞风险时做出规避处理。
9.进一步地,步骤一中判定两个工作台在横向位置上是否有碰撞风险的具体方式为:
设两个工作台面回转范围相切时两个工作台所在位置的坐标差值为k,当两个工作台所在位置的坐标差值大于k时,则系统判断两个工作台处于相对安全位置,当两个工作台所在位置的坐标差值小于或等于k时,则系统判断两个工作台有相撞的可能性,并进行下一步判定。
10.进一步地,步骤二中判定两个工作台的转动状态的具体方式为:读取两个光电开关一反馈数值,判断工作台当前状态是否处于横向状态或纵向状态,若两个光电开关一均没有反馈有效数值,则进一步判定绝对值编码器一的反馈数值,通过该数值计算出两个工作台最近点的纵向坐标差,再根据坐标差判断两个工作台在当前转动状态下位移是否存在碰撞风险。
11.进一步地,步骤三中最终判定两个工作台的高度位置,并在发现有碰撞风险时做出规避处理的具体方式为:读取到光电开关二的反馈数值,得到有效反馈数值则判定对应的工作台面升降控制电机处于初始状态,无法读取到有效反馈数值则判定对应的工作台面升降控制电机处于运行状态,进一步读取绝对值编码器二的反馈数值,通过该数值计算出对应工作台面当前的高度坐标,并控制高度坐标值较大的工作台进一步升高,控制高度坐标值较小的工作台进一步降低,直至两个工作台面间产生预设的高度差后,判定两工作台可安全的进行旋转和平移操作。
12.使用本发明的有益效果是:通过在现有设备的对应位置加装传感器并配合判断逻辑,实现分拣机多工作台间的碰撞预防效果,避免设备运行时突发性断电或设备老化磨损精度下降等因素,导致工作台发生碰撞。
附图说明
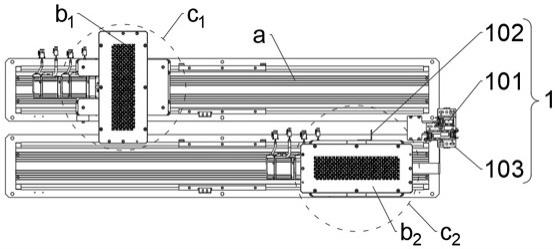
13.图1为应用本发明的工作台及轨道的俯视图;图2为应用本发明的工作台及轨道在两工作台面回转范围相切状态下的俯视图;图3为应用本发明的工作台的主视图;图4为应用本发明的工作台的轴侧图。
14.附图标记包括:a-轨道;b
1-一号工作台;b
2-二号工作台;c
1-第一工作台面回转范围;c
2-第二工作台面回转范围;1-工作台测距组件;101-测距传感器;102-挡片一;103-装配架;2-工作台面转动判定组件;201-光电开关一;202-挡片二;203-绝对值编码器一;3-工作台面升降判定组件;301-光电开关二;302-挡片三;303-绝对值编码器二。
具体实施方式
15.以下结合附图对本发明进行详细的描述。
16.参照图1-图4,一种工作台防撞组件,包括工作台测距组件1、工作台面转动判定组件2、工作台面升降判定组件3,工作台测距组件1设置于轨道a与工作台之间,用于检测工作台与轨道a一端的距离,工作台面转动判定组件2设置于工作台底座与工作台面之间,用于检测工作台面的转动角度,工作台面升降判定组件3设置于工作台的底部,用于检测工作台的升降高度。
17.所述工作台测距组件1包括测距传感器101、挡片一102、装配架103,装配架103装配于两个轨道a之间,两个测距传感器101装配于装配架103上,两个挡片一102分别装配于两个工作台的里侧,且两个挡片一102的位置分别与两个测距传感器101位置对应。
18.所述工作台面转动判定组件2包括光电开关一201、挡片二202、绝对值编码器一203,两个光电开关一201以90
°
夹角装配于工作台底座的上表面上,挡片二202固定安装于工作台面的底部,能够随工作台面转动,控制工作台面转动的控制电机上装配有绝对值编码器一203。
19.所述工作台面升降判定组件3包括光电开关二301、挡片三302、绝对值编码器二303,光电开关二301装配于工作台的底部,挡片三302装配于工作台升降导向机构的外侧,控制工作台面升降的控制电机上装配有绝对值编码器二303。
20.一种工作台防撞方法,其具体步骤包括:步骤一、读取工作台测距组件1的反馈数值,测算两个工作台在轨道上的位置坐标;两个工作台面回转范围分别为第一工作台面回转范围c1和第二工作台面回转范围c2,以第一工作台面回转范围c1和第二工作台面回转范围c2相切时两个工作台所在位置的坐标(以工作台面回转范围的圆心为坐标位置判定点)差值k为安全判定标准;当两个工作台所在位置的坐标差值大于k时,则系统判断两个工作台处于相对安全位置,没有碰撞风险,可进行工作台面转动或工作台移动操作;当两个工作台所在位置的坐标差值小于或等于k时,则系统判断两个工作台有相撞的可能性,并进行下一步判定。
21.步骤二、读取工作台面转动判定组件2的反馈数值,测算两个工作台面的当前转动角度;两个光电开关一201的位置对应工作台的两个常驻状态,即工作台面为横向的状态和工作台面为纵向的状态(本技术中的横向和纵向均以图1俯视视角下为基准进行定义),工作台面绝大多数情况下处于这两种状态下,故通过判断两个光电开关一201的反馈数值可快速判断工作台面当前的转动状态(工作台面处于横向状态时,挡片二202位于横向位置对应光电开关一201处,遮挡光电开关一201使其反馈数值,纵向状态时同理),即检测方向平行于轨道a的光电开关一201反馈数值时,工作台面处于横向状态,检测方向垂直于轨道a的光电开关一201反馈数值时,工作台面处于纵向状态;当两个工作台面均为横向状态时,系统判定两个工作台没有碰撞风险,可进行工作台移动操作;当两个工作台面均为纵向状态或其中一个处于纵向状态,系统判定两个工作台有碰撞风险,并进行下一步判断;当无法读取到有效的光电开关一201反馈数值时,则进一步判定绝对值编码器一203的反馈数值,通过该数值换算出工作台面当前角度,再通过当前角度演算两个工作台最近点的纵向坐标差j(j=一号工作台b1最前端坐标点的纵坐标-二号工作台b2最后端坐标点的纵坐标);当j值为正时,系统判定两个工作台没有碰撞风险,可进行工作台移动操作;当j值为负或零时,系统判定两个工作台有碰撞风险,并进行下一步判断。
22.步骤三、读取工作台面升降判定组件3的反馈数值,测算两个工作台的当前高度差;读取光电开关二301的反馈数值(当工作台位于最低点时挡片三302遮挡光电开关二301并反馈数值);当读取到光电开关二301的反馈数值时,则判定对应的工作台面升降控制电机处于初始状态,工作台面位于最低点;当无法读取到有效的光电开关二301反馈数值时,则判定对应的工作台面升降控制电机处于运行状态,进一步读取绝对值编码器二303的反馈数值;读取绝对值编码器二303的反馈数值,通过该数值换算出工作台面当前高度坐标,并对两个工作台面当前高度做比较,控制工作台面高度较高的工作台进一步升高,工作台面高度较低的工作台进一步降低,直至两个工作台面间产生预设的高度差后(该高度差数值根据工作台面厚度、工作台面上放置物料的厚度及螺钉等凸点的高度综合考量后设置),判定两工作台可安全的进行旋转和平移操作。
23.本方法具体应用时,将判断逻辑插入至系统执行工作台位移指令前即可。
24.上述判定逻辑均可通过相关技术人员使用常规计算机语言编写实现,故不对具体代码做过多赘述。
25.以上内容仅为本发明的较佳实施例,对于本领域的普通技术人员,依据本发明的思想,在具体实施方式及应用范围上可以作出许多变化,只要这些变化未脱离本发明的构思,均属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1