一种基于机器视觉的智能分选装置及控制系统的制作方法
1.本实用新型涉及锂电池回收装置技术领域,具体涉及一种基于机器视觉的智能分选装置及控制系统。
背景技术:
2.现有的废弃锂离子电池的正负极材料、电解质溶液等物质对环境和人体健康还是有很大影响。锂离子电池中所含的锂、铁、锰、镍、铜等金属95%可以回收再利用。锂离子电池的环保回收和资源再利用,不仅可以大大节约锂资源,而且也有利于环境保护和经济社会的可持续发展,产生巨大的环境效益,和显著的经济及社会效益。
3.目前在锂电池物理法回收工艺中,针对锂电池回收行业铜铝粉分选设备,市场上主要是通过操作人员凭借分选设备铜粉和铝粉的出料情况根据经验值对风力大小、振动频率、倾斜角度进行手动调节。人工调节的参数对于生产的铜粉含铜率较低,铝粉的含铝率较低,且出料不稳定,同一个振动频率、风力大小和倾斜角度会因为来料铜铝粉含量和粒径分布不同有所改变。
技术实现要素:
4.为了解决上述技术问题,本实用新型提供了一种基于机器视觉的智能分选装置及控制系统,采用视觉检测系统检测,人工智能系统数据处理和计算,plc控制系统带动变频器执行,最终实现整个铜铝分选设备自匹配参数,实时保证铜粉和铝粉出料状态最优。
5.为了达到上述技术效果,本实用新型提供了如下技术方案:
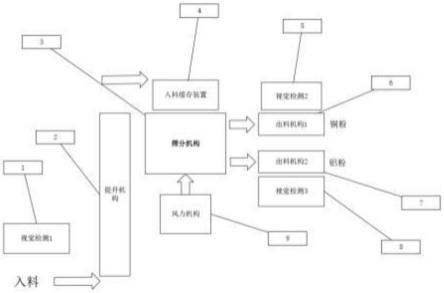
6.一种基于机器视觉的智能分选装置,包括入料机构、提升机构、筛分机构和出料机构,所述入料机构设置在所述提升机构的前端,所述筛分机构下方设置有风力机构,所述出料机构设置在所述筛分机构的尾端,所述入料机构的前端设置有第一视觉检测装置,所述出料机构包括第一出料机构和第二出料机构,所述第一出料机构的出口处设置有第二视觉检测装置,所述第二出料机构的出口处设置有第三视觉检测装置。
7.进一步的技术方案为,所述筛分机构的上方设置有入料缓存装置,所述入料缓存装置的下方与所述筛分机构位置相对。
8.进一步的技术方案为,所述筛分机构中设置有振动电机,所述振动电机采用变频器驱动的变频电机,倾斜角度采用伺服驱动器驱动的伺服电机控制。
9.进一步的技术方案为,所述风力机构中的电机采用变频器驱动的变频电机。
10.进一步的技术方案为,所述第一视觉检测装置、第二视觉检测装置和第三视觉检测装置均采用带光源的工业相机。
11.本实用新型还提供一种基于机器视觉的智能控制系统,所述控制系统用于控制所述的智能分选装置,所述控制系统包括视觉检测系统,人工智能控制系统和plc控制系统,所述视觉检测系统用于将视觉检测装置获得的图片进行识别并检测,并将检测数据实时上传至人工智能系统;所述人工智能系统用于将上传的数据进行分析计算得到最佳匹配的振
动频率、风力大小、倾斜角度,并将这些数据实时下发到plc控制系统,所述plc控制系统根据人工智能系统下发的数据对振动电机变频器和风力电机变频器频率进行实时调节,对角度调节伺服电机角度进行调节。
12.与现有技术相比,本实用新型具有如下有益效果:本实用新型在入料处和出料口处增加视觉检测装置,通过视觉检测装置进行检测并分析,人工智能系统数据处理和计算,plc控制系统带动变频器执行,最终实现整个铜铝分选设备自匹配参数,实时保证铜粉和铝粉出料状态最优。视觉检测系统采集识别入料和出料铜粉铝粉含量粒径分布大小,并将数据上传保存能够直观的看到和查询物料状态。
附图说明
13.图1为本实用新型的智能分选装置的示意图;
14.图2位本实用新型的控制系统的示意图。
15.其中,1-第一视觉检测装置,2-提升机构,3-筛分机构,4-入料缓存装置,5-第二视觉检测装置,6-第一出料机构,7-第二出料机构,8-第三视觉检测装置,9-风力机构。
具体实施方式
16.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型。
17.实施例1
18.如图1所示,本实施例提供了一种基于机器视觉的智能分选装置,包括入料机构、提升机构2、筛分机构3和出料机构,其中入料机构为前一个工序出料的铜粉铝粉混合物从入料机构进入到分选装置中,所述入料机构设置在所述提升机构2的前端,所述筛分机构3的上方设置有入料缓存装置4,所述入料缓存装置4的下方与所述筛分机构3位置相对。所述入料缓存装置4为提升机构2将铜粉和铝粉混合物通过提升机构提升进入入料缓存装置4进行缓存,所述筛分机构3下方设置有风力机构9,所述风力机构9中的电机采用变频器驱动的变频电机,所述筛分机构3中设置有振动电机,所述振动电机采用变频器驱动的变频电机,倾斜角度采用伺服驱动器驱动的伺服电机控制。所述出料机构设置在所述筛分机构的尾端,所述入料机构的前端设置有第一视觉检测装置1,所述出料机构包括第一出料机构6和第二出料机构7,所述第一出料机构6的出口处设置有第二视觉检测装置5,所述第二出料机构7的出口处设置有第三视觉检测装置8。所述第一视觉检测装置1、第二视觉检测装置5和第三视觉检测装置8均采用带光源的工业相机。筛分机构3筛分出来的铜粉经过第一出料机构6出料进入到下一个工序,筛分机构筛分出来的铝粉经过第二出料机构7出料进入到下一个工序。提升机构2将铜铝粉混合物传送至入料缓存装置4中,入料缓存装置4将铜铝粉混合物均匀流入筛分机构3中;筛分机构3中振动筛网倾斜一定角度,风机在筛分机构下方吹气通过筛网将密度较小的铝粉吹起为悬浮状态,筛分机构3振动过程中,密度大的铜粉沿着振动筛网向上爬升,悬浮状态的铝粉从第二出料机构7中分离出来,爬升最快的铜粉含量最高从第一出料机构6中分离出来。第一视觉检测装置1安装于入料机构前端,每隔20s(间隔时间可以设置)对来料铜粉和铝粉混合物进行拍照采样,将采样的图片上传至视觉处理器中。
第二视觉检测装置5安装于铜铝粉分选设备铜粉出口处,每隔20s(间隔时间可以设置)对出口处铜粉进行拍照采样,将采样的图片上传至视觉处理器中。第三视觉检测装置8安装于铜铝粉分选设备铝粉出口处,每隔20s(间隔时间可以设置)对出口处的铝粉进行拍照采样,将采样的图片上传至视觉处理器中。
19.实施例2
20.如图2所示,本实用新型还提供一种基于机器视觉的智能控制系统,所述控制系统用于控制所述的智能分选装置,所述控制系统包括视觉检测系统,人工智能控制系统和plc控制系统,所述视觉检测系统用于将视觉检测装置获得的图片进行识别并检测,并将检测数据实时上传至人工智能系统;视觉处理器将第一视觉检测装置上传的图片进行识别分析铜铝粉的粒径分布,通过颜色识别得到铜粉含量和铝粉含量,将第二视觉检测装置上传的图片进行识别分析铜粉的粒径分布,通过颜色识别得到的铜粉含量;将第三视觉检测装置上传的图片进行识别分析铝粉的粒径分布,通过颜色识别得到的铝粉含量;视觉处理器将检测数据实时上传人工智能系统。所述人工智能系统用于将上传的数据进行分析计算得到最佳匹配的振动频率、风力大小、倾斜角度,并将这些数据实时下发到plc控制系统,所述plc控制系统根据人工智能系统下发的数据对振动电机变频器和风力电机变频器频率进行实时调节,对角度调节伺服电机角度进行调节,实时保证铜铝分选机系统处于最佳参数状态。
21.尽管这里参照本实用新型的解释性实施例对本实用新型进行了描述,上述实施例仅为本实用新型较佳的实施方式,本实用新型的实施方式并不受上述实施例的限制,应该理解,本领域技术人员可以设计出很多其他的修改和实施方式,这些修改和实施方式将落在本技术公开的原则范围和精神之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1