本发明涉及分拣,尤其是一种串并联变换的多机械臂矸石分拣系统及其控制策略。
背景技术:
1、国家能源局与科学技术部最新印发的《“十四五”能源领域科技创新规划》将煤炭精准智能化洗选加工技术作为重点任务之一,并要求形成煤炭精确分选技术工艺及装备。
2、现有的煤矸石机械臂分拣装置主要有桁架式、串联式与并联式,末端机械手爪的分拣方式分为抓取与拨离,通过机械臂本体与末端机械手爪的相互配合,可以得到多种形式的机械臂分拣装置,它们分别具有各自的优劣势,串联式的每个单独的机械臂可以自由实现单个矸石的抓取或拨离。
3、面对需要进行分拣的粒径大小错杂的煤矸石,分拣要求的不断提高,单一的串联或并联机械臂,以及单一的抓取或拨离分拣方式,已经不足以满足要求,串联式的单臂分拣难以对粒径较大的矸石进行操作,并联式的机械臂通过协作可以实现对粒径较大的矸石进行分拣,但功率消耗较大,因此需要开发功能多样化,更加柔性的机械臂分拣系统来复杂的多种应用工况,以提高分拣效率。
技术实现思路
1、本发明要解决的技术问题是:现有技术中单一的串联机械臂分拣装置或并联机械臂分拣装置难以满足复杂的应用工况,分拣效率较低。
2、为此,本发明提供一种串并联变换的多机械臂矸石分拣系统及其控制策略,使得该分拣系统可以应用在多种复杂工况下的矸石分拣中,以提高分拣效率及精度。
3、本发明解决其技术问题所采用的技术方案是:
4、一种串并联变换的多机械臂矸石分拣系统,包括,
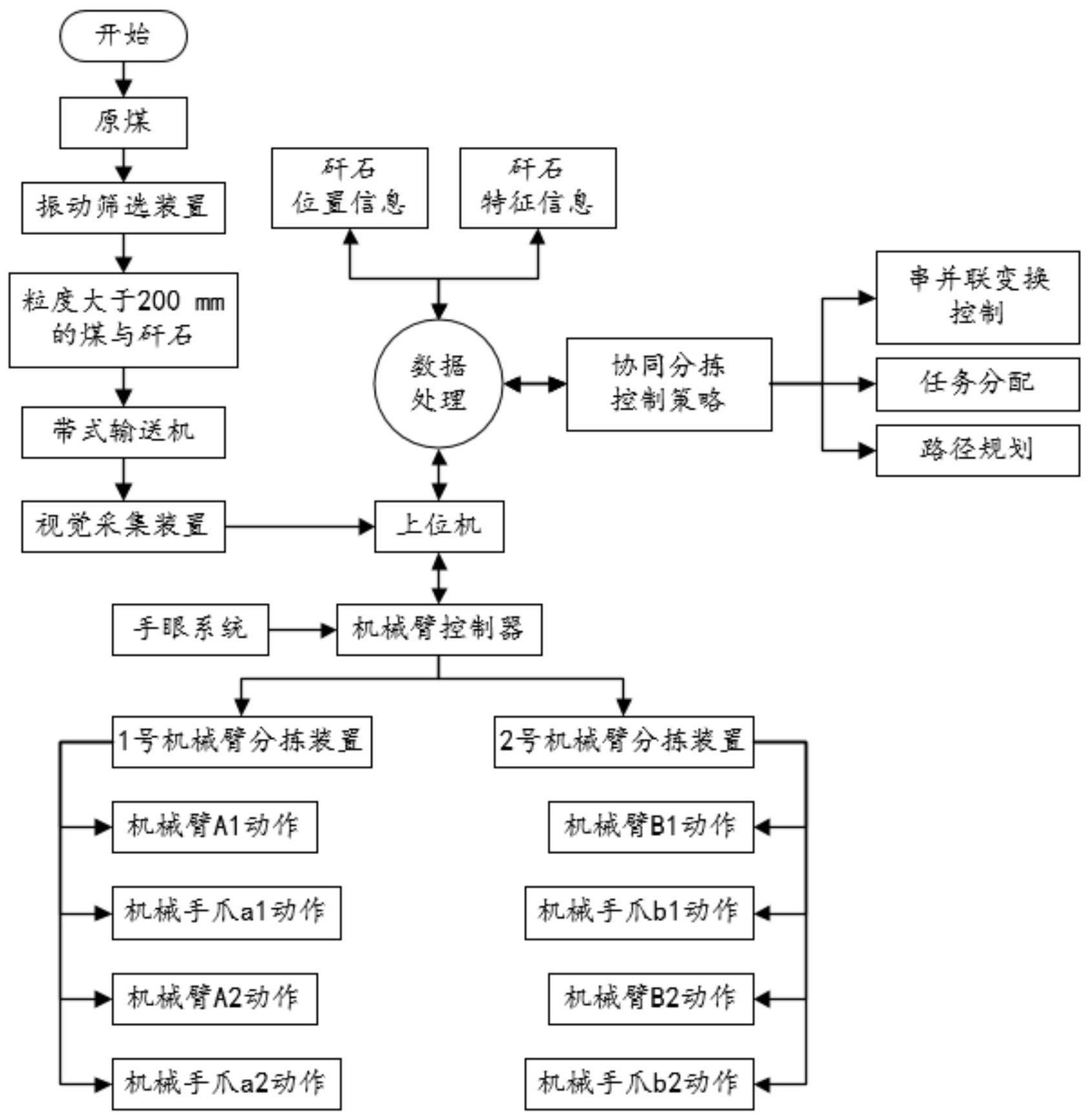
5、带式输送机,以及
6、振动筛选装置,所述振动筛选装置设置在带式输送机的上料端并用于将粒径大于200mm的煤与矸石筛选出来,传递到带式输送机上;
7、机械臂分拣装置,所述机械臂分拣装置沿带式输送机的输送方向设置有多个,每个所述机械臂分拣装置中均包括两个多自由度机械臂,所述机械臂上连接有用于对带式输送机上的矸石进行分拣的机械手爪,所述机械手爪的功能形态可以分为两种:抓取形态与拨离形态;
8、控制器,所述控制器用于操控机械臂执行分拣动作,所述控制器操控两个机械臂在串联控制下独立执行分拣动作或操控同一个机械臂分拣装置中的两个机械臂在并联控制下协同执行分拣动作。
9、通过采用上述技术方案,机械臂在串联控制下可以单独对矸石进行抓取或拨离的操作,灵活度和自由度高,操作方便,但是面对粒径较大的矸石时,机械臂对其执行抓取,由于矸石粒径较大,且重量较大,单一的机械臂进行操作时,功率消耗较大,且对机械臂的损伤较大,矸石容易因为机械臂抓取不稳而掉落,从而容易对整个分拣装置造成损伤,造成矸石摔裂摔碎,而并联的方式操作复杂且笨重,分拣效率较低,面对粒径较小的矸石时协同抓取难以抓取矸石,因此单一的串联或并联机械臂面对复杂的应用场景时,均存在分拣效率低的问题。通过机械手爪实现抓取与拨离的形态变换,配合机械臂实现串并联变换的矸石分拣方式,从而在面对复杂应用工况下的矸石分拣时,可以根据矸石实际的大小,控制机械臂切换串并联状态,串联状态下单个机械臂对粒径较小的矸石进行抓取或拨离,并联状态下控制两个机械臂对矸石协同分拣,有效降低了机械臂的运行功率,提升了矸石的分拣精度与效率,实现多机械臂分拣系统的高效分拣。
10、进一步地,所述分拣动作包括串联控制下的单臂抓取、串联控制下的单臂拨离、并联控制下的同一个机械臂分拣装置中的双臂协同抓取。
11、进一步地,还包括视觉采集装置,所述视觉采集装置设置在振动筛选装置与机械臂分拣装置之间,所述视觉采集装置通过双目立体相机获取带式输送机上的煤与矸石的图像,为控制器控制机械臂分拣动作提供依据。
12、进一步地,所述机械臂上设置有工业相机,所述工业相机与机械臂组成手眼系统用于对矸石在带式输送机上的状态进行动态跟踪。
13、通过采用上述技术方案,采用双目立体相机配合机械臂手眼系统,实现对矸石的识别与动态跟踪。
14、一种串并联变换的多机械臂矸石分拣控制策略,包括
15、通过视觉采集装置对带式输送机上矸石的分布位置进行判断,首先对于矸石与输送带边缘之间的煤量进行判断;
16、若矸石与输送带边缘之间的煤量低于预设阈值,则采用单臂拨离进行分拣;
17、若矸石与输送带边缘之间的煤量高于预设阈值,则根据矸石大小制定串并联分拣任务,根据矸石分布以及大小实施三种分拣动作。
18、通过采用上述技术方案,通过对待分拣的矸石的分布情况进行判断,制定合适的分拣任务,并对其规划合适的路径,从而实现对矸石快速准确分拣。
19、进一步地,所述串并联分拣任务是基于km算法制定的,采用km算法对机械臂矸石组成的带权二分图进行最佳匹配求解,km算法求解规则,具体如下:
20、规则1:每台机械臂在同一时间只能执行一项分拣任务;
21、规则2:在同一分拣区工作的两台机械臂防止发生碰撞;
22、规则3:在同一分拣区工作的两台机械臂遵守串并联变换控制策略;
23、规则4:机械臂优先执行距离自己近的矸石分拣任务;
24、规则5:在任务溢出情况下,优先执行大型矸石分拣任务;
25、规则6:前面机械臂执行任务时,尽量不对后面的矸石信息造成破坏;
26、规则7:尽量保证每台机械臂均有执行任务。
27、进一步地,经过km算法求解后采用改进的rrt算法对多机械臂进行路径规划。
28、进一步地,将引力与斥力引入到rrt算法中。
29、通过采用上述技术方案,通过引力引导随机节点往目标物方向生长,同时通过斥力限制随机节点往障碍物处扩展,减少无效节点数量。
30、进一步地,采用混合曲线轨迹对机械臂移动路径进行控制。
31、通过采用上述技术方案,可以维持机械手爪沿路径移动过程中位移、速度与加速度的连续性。
32、本发明的有益效果是,本发明采用双目立体相机配合机械臂手眼系统,实现对矸石的识别与动态跟踪;并着重研究了机械臂分拣装置,设计了一种多功能机械手爪,可实现抓取与拨离的形态变换,配合机械臂实现串并联变换的矸石分拣方式,并制定了串并联变换控制策略,有效降低了机械臂的体积与功率,提升了矸石的分拣精度与效率;为了实现多机械臂分拣系统的高效分拣,采用km算法对多机械臂矸石组进行任务分配,获得最佳任务匹配;然后采用人工势场+rrt算法对多机械臂进行路径规划,将引力与斥力引入到rrt算法中,减少无效节点的产生,提高规划效率,并采用混合曲线轨迹对机械臂进行控制,保证运动的平稳性;最后制定了多机械臂协同分拣控制策略,实现对矸石快速准确分拣。基于串并联变换的多机械臂矸石分拣系统可实现对中大型矸石的快速准确分拣,为机械臂在矸石分拣领域的应用提供了一种新的方法。
技术特征:1.一种串并联变换的多机械臂矸石分拣系统,其特征在于,包括,
2.根据权利要求1所述的串并联变换的多机械臂矸石分拣系统,其特征在于,所述分拣动作包括串联控制下的单臂抓取、串联控制下的单臂拨离、并联控制下的同一个机械臂分拣装置(4)中的双臂协同抓取。
3.根据权利要求1所述的串并联变换的多机械臂矸石分拣系统,其特征在于,还包括视觉采集装置(3),所述视觉采集装置(3)设置在振动筛选装置(2)与机械臂分拣装置(4)之间,所述视觉采集装置(3)通过双目立体相机获取带式输送机(1)上的煤与矸石的图像,为控制器控制机械臂分拣动作提供依据。
4.根据权利要求1所述的串并联变换的多机械臂矸石分拣系统,其特征在于,所述机械臂上设置有工业相机(401),所述工业相机(401)与机械臂组成手眼系统用于对矸石在带式输送机(1)上的状态进行动态跟踪。
5.一种串并联变换的多机械臂矸石分拣控制策略,其特征在于,包括
6.根据权利要求5所述的串并联变换的多机械臂矸石分拣控制策略,其特征在于,所述串并联分拣任务是基于km算法制定的,采用km算法对机械臂矸石组成的带权二分图进行最佳匹配求解,km算法求解规则,具体如下:
7.根据权利要求5所述的串并联变换的多机械臂矸石分拣控制策略,其特征在于,经过km算法求解后采用改进的rrt算法对多机械臂进行路径规划。
8.根据权利要求5所述的串并联变换的多机械臂矸石分拣控制策略,其特征在于,将引力与斥力引入到rrt算法中。
9.根据权利要求5所述的串并联变换的多机械臂矸石分拣控制策略,其特征在于,采用混合曲线轨迹对机械臂进行移动路径控制。
技术总结本发明涉及分拣技术领域,尤其是一种串并联变换的多机械臂矸石分拣系统及其控制策略,该串并联变换的多机械臂矸石分拣系统,包括带式输送机、振动筛选装置、沿带式输送机的输送方向设置多个的机械臂分拣装置,每个所述机械臂分拣装置中均包括两个多自由度机械臂,机械臂上的机械手爪的功能形态可以分为两种:抓取形态与拨离形态;控制器操控两个机械臂在串联控制下独立进行分拣或同一个机械臂分拣装置中的两个机械臂在并联控制下协同运作进行分拣。分拣控制策略,通过对煤矸石的分布位置、粒径大小进行判断,制定串并联分拣任务实施三种分拣动作。本申请通过串并联变换控制适用于复杂工况下的矸石分拣,提高分拣效率以及分拣精度。
技术研发人员:迟海波,周李兵,黄小明,姜振南,顾巧明,高飞,张袁浩,陆卫东,崔鹏飞,王艳
受保护的技术使用者:天地(常州)自动化股份有限公司
技术研发日:技术公布日:2024/1/15