一种智能制造机器人自动分拣平台的制作方法
本技术涉及机器人自动分拣平台领域,具体而言,涉及一种智能制造机器人自动分拣平台。
背景技术:
1、中国实用新型专利(实用新型号:cn201920707656.5)所提出的一种分拣平台以及分拣机,涉及分拣设备技术领域。该分拣平台包括分拣小车和分拣轨道;分拣小车具有行走轮和导向轮,分拣轨道具有用于行走轮滚动的行走面和用于导向轮滚动的导向面,且导向面设置有用于阻止导向轮偏离导向面的限位部。
2、但是现有的实用新型号:cn201920707656.5所提出的一种分拣平台以及分拣机在使用的过程中存在一些不足之处仍需要进行改进,现有的机器人自动分拣平台无法经过视觉相机捕捉位置和分析产品有无不良,其次是现有的机器人自动分拣平台无法进行自动的托盘输送,而且在装载的过程中在出现满载的情况时无法进行及时的报警,因此我们对此做出改进,提出一种智能制造机器人自动分拣平台。
技术实现思路
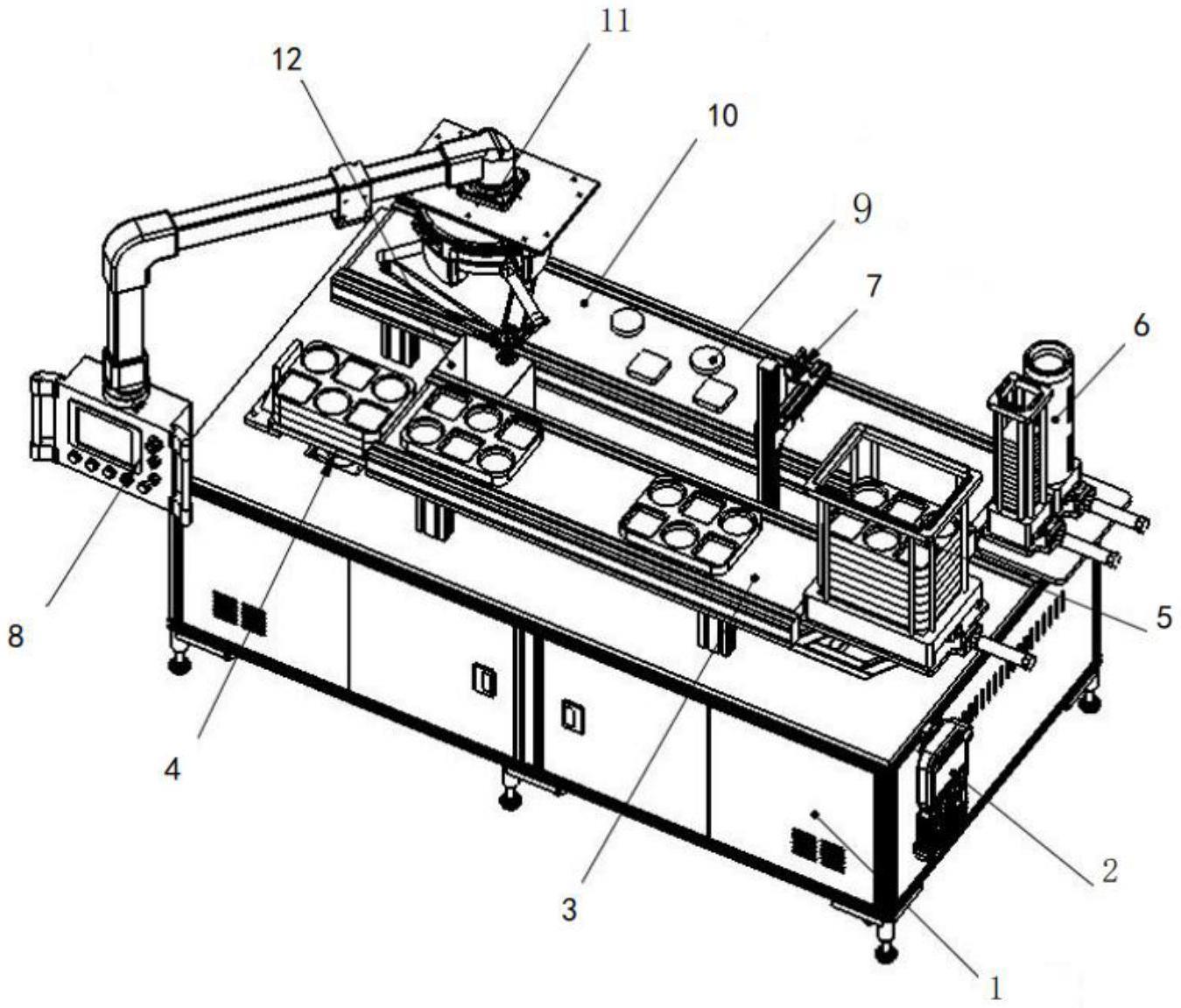
1、本实用新型的目的在于:针对目前存在的背景技术提出的问题。为了实现上述实用新型目的,本实用新型提供了以下技术方案:一种智能制造机器人自动分拣平台,包括机箱,所述机箱的前表面设置有机器人示教器,所述机箱的上表面设置有托盘输送带,所述托盘输送带上放置有托盘本体,所述托盘输送带的端部设置有收料升降机构,所述托盘输送带的另一端部设置有托盘放料仓,所述托盘放料仓的侧边设置有产品放料仓,所述产品放料仓的下部设置有产品输送带。
2、作为本实用新型优选的技术方案,所述产品输送带的中部上方设置有视觉相机,所述产品输送带的另一端设置有并联机器人,所述并联机器人通过悬臂连接有悬臂操作箱。
3、作为本实用新型优选的技术方案,所述托盘放料仓的外表面设置有外框体,所述外框体内放置有托盘。
4、作为本实用新型优选的技术方案,所述产品放料仓和所述产品输送带上放置有产品本体。
5、作为本实用新型优选的技术方案,所述托盘输送带与所述产品输送带之间设置有不良品收料盒。
6、作为本实用新型优选的技术方案,所述收料升降机构设置有液压缸和升降液压杆,所述升降液压杆嵌入在所述液压缸的内表面。
7、作为本实用新型优选的技术方案,所述并联机器人的下部设置有转动盘底座。
8、与现有技术相比,本实用新型的有益效果:
9、在本实用新型的方案中:
10、1.通过产品放料仓将两种不同形状的产品推送到产品输送带上,与此同时,托盘放料仓将托盘推送到托盘输送带上,两条输送带输送带负载向前;产品输送带输送产品,经过视觉相机捕捉位置和分析产品有无不良,产品输送到并联机器人工作区,机器人吸取产品快速摆放到对应的托盘槽位中,不良品放到不良品收料盒中。
11、2.托盘输送带输送托盘,托盘输送到感应器位置,停止向前,机器人摆满产品,输送带将托盘推送到收料升降机构。收料升降机构将装好盘的产品下降一层层垛码好,满载报警通过本设备结构小型,组件独立,可以帮助学生进行plc开发,视觉开发,机器人应用等各科课程的内容。
技术特征:
1.一种智能制造机器人自动分拣平台,包括机箱(1),其特征在于,所述机箱(1)的前表面设置有机器人示教器(2),所述机箱(1)的上表面设置有托盘输送带(3),所述托盘输送带(3)上放置有托盘本体,所述托盘输送带(3)的端部设置有收料升降机构(4),所述托盘输送带(3)的另一端部设置有托盘放料仓(5),所述托盘放料仓(5)的侧边设置有产品放料仓(6),所述产品放料仓(6)的下部设置有产品输送带(10),所述产品输送带(10)的中部上方设置有视觉相机(7),所述产品输送带(10)的另一端设置有并联机器人(11),所述并联机器人(11)通过悬臂连接有悬臂操作箱(8),所述托盘放料仓(5)的外表面设置有外框体,所述外框体内放置有托盘,所述产品放料仓(6)和所述产品输送带(10)上放置有产品本体(9)。
2.根据权利要求1所述的一种智能制造机器人自动分拣平台,其特征在于,所述托盘输送带(3)与所述产品输送带(10)之间设置有不良品收料盒(12)。
3.根据权利要求2所述的一种智能制造机器人自动分拣平台,其特征在于,所述收料升降机构(4)设置有液压缸和升降液压杆,所述升降液压杆嵌入在所述液压缸的内表面。
4.根据权利要求3所述的一种智能制造机器人自动分拣平台,其特征在于,所述并联机器人(11)的下部设置有转动盘底座。
技术总结
本技术提供了一种智能制造机器人自动分拣平台,通过产品放料仓将两种不同形状的产品推送到产品输送带上,与此同时,托盘放料仓将托盘推送到托盘输送带上,两条输送带输送带负载向前;产品输送带输送产品,经过视觉相机捕捉位置和分析产品有无不良,产品输送到并联机器人工作区,机器人吸取产品快速摆放到对应的托盘槽位中,不良品放到不良品收料盒中,托盘输送带输送托盘,托盘输送到感应器位置,停止向前,机器人摆满产品,输送带将托盘推送到收料升降机构。收料升降机构将装好盘的产品下降一层层垛码好,满载报警,通过本设备结构小型,组件独立,可以帮助学生进行PLC开发,视觉开发,机器人应用等各科课程的内容。
技术研发人员:唐灯,蔺代永,周塘,谭冰
受保护的技术使用者:湖南翰阳信息科技有限公司
技术研发日:20230210
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!