一种粮食杂质清理方法及系统与流程
本申请涉及粮食储运和加工,具体涉及一种粮食杂质清理方法及系统。
背景技术:
1、粮食在生产、加工和存储过程中,为便于长期存储或确保生产质量,需进行杂质等异物清理。目前,杂质清理主要依靠人工和机械作业。
2、现有机械作业所使用的杂质清理设备中,其设备参数通常是根据操作人员的经验手动设定,在实际作业过程中卸车效率变化、粮食品种变化、水分变化、杂质类型和杂质含量变化、设备性能变化时不能自动调整个系统相关环节的匹配参数,需要手动调节,杂质清理设备作业效率不能实现最大化,并且手动调节依赖工作人员经验,使得设备参数的准确性较差,难以达到预期的清理效果,容易造成清理出来的杂质中含有大量正常粮食,或造成清理后的粮食过渡干净产生质量损失,或造成清理后粮食含杂率不达标,还可能造成产生超量作业引起设备故障等问题。
技术实现思路
1、本申请旨在解决现有粮食杂质清理方法效率低并且难以达到预期清理效果的问题,提出一种粮食杂质清理方法及系统。
2、本申请解决上述技术问题所采用的技术方案是:
3、第一方面,本申请提供一种粮食杂质清理方法,所述方法包括:
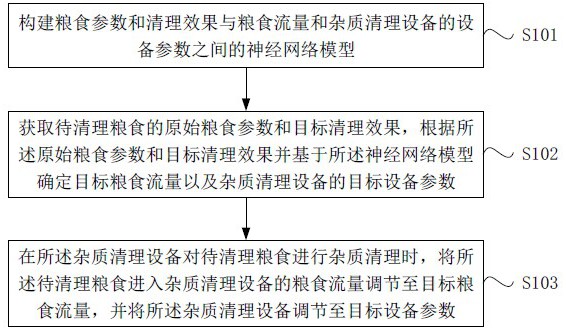
4、构建粮食参数和清理效果与粮食流量和杂质清理设备的设备参数之间的神经网络模型,所述粮食参数至少包括粮食种类、水分含量、杂质含量和杂质类型,所述清理效果为杂质清理后粮食的杂质含量范围;
5、获取待清理粮食的原始粮食参数和目标清理效果,根据所述原始粮食参数和目标清理效果并基于所述神经网络模型确定目标粮食流量以及杂质清理设备的目标设备参数;
6、在所述杂质清理设备对待清理粮食进行杂质清理时,将所述待清理粮食进入杂质清理设备的粮食流量调节至目标粮食流量,并将所述杂质清理设备调节至目标设备参数。
7、进一步地,所述方法还包括:
8、在所述杂质清理设备对待清理粮食进行杂质清理时,检测杂质清理后粮食的当前杂质含量,并判断当前杂质含量是否处于目标杂质含量范围,若否,则对目标设备参数进行调节,直至当前杂质含量处于目标杂质含量范围。
9、进一步地,所述杂质清理设备包括风选清理装置,所述风选清理装置的设备参数包括风速;
10、将所述杂质清理设备调节至目标设备参数,具体包括:将所述风选清理装置调节至目标风速。
11、进一步地,所述方法还包括:
12、在将所述风选清理装置调节至目标风速后,检测所述风选清理装置的当前风速,并判断当前风速与目标风速是否一致,若否,则再次对风选清理装置的风速进行调节,直至当前风速与目标风速一致。
13、进一步地,所述杂质清理设备包括设有粗清筛网的粗清清理装置,所述粗清清理装置的设备参数包括粗清筛网的第一倾斜角度和第一运动速度,所述第一运动速度为粗清筛网的振动速度或转动速度;
14、将所述杂质清理设备调节至目标设备参数,具体包括:将粗清清理装置调节至第一目标倾斜角度和第一目标运动速度,所述第一目标运动速度为粗清筛网的目标振动速度或目标转动速度。
15、进一步地,所述方法还包括:
16、在所述粗清清理装置对待清理粮食进行杂质清理时,检测粗清筛网上的粮食分布状态信息,并根据所述粮食分布状态信息对目标粮食流量以及粗清筛网的第一目标倾斜角度和第一目标运动速度进行调节。
17、进一步地,所述杂质清理设备包括设有精清筛网的精清清理装置,所述精清清理装置的设备参数包括精清筛网的第二倾斜角度和第二运动速度,所述第二运动速度为精清筛网的振动速度或转动速度;
18、将所述杂质清理设备调节至目标设备参数,具体包括:将精清清理装置调节至第二目标倾斜角度和第二目标运动速度,所述第二目标运动速度为精清筛网的目标振动速度或目标转动速度。
19、进一步地,所述方法还包括:
20、在所述精清清理装置对待清理粮食进行杂质清理时,检测精清筛网上的粮食堆叠高度,并根据所述粮食堆叠高度对目标粮食流量以及精清筛网的第二目标倾斜角度和第二目标运动速度进行调节。
21、第二方面,本申请提供一种粮食杂质清理系统,用于实现如第一方面所述的粮食杂质清理方法,所述系统包括:
22、构建单元,用于构建粮食参数和清理效果与粮食流量和杂质清理设备的设备参数之间的神经网络模型,所述粮食参数至少包括粮食种类、水分含量、杂质含量和杂质类型,所述清理效果为杂质清理后粮食的杂质含量范围;
23、确定单元,用于获取待清理粮食的原始粮食参数和目标清理效果,根据所述原始粮食参数和目标清理效果并基于所述神经网络模型确定目标粮食流量以及杂质清理设备的目标设备参数;
24、调节单元,用于在所述杂质清理设备对待清理粮食进行杂质清理时,将所述待清理粮食进入杂质清理设备的粮食流量调节至目标粮食流量,并将所述杂质清理设备调节至目标设备参数。
25、进一步地,所述杂质清理设备为风选清理装置、粗清清理装置或精清清理装置,所述风选清理装置设备参数包括风速,所述粗清清理装置设备参数包括粗清筛网的第一目标倾斜角度和第一目标运动速度,所述精清清理装置的设备参数包括精清筛网的第二目标倾斜角度和第二目标运动速度。
26、本申请的有益效果是:本申请提供的粮食杂质清理方法及系统,通过构建粮食参数和清理效果与粮食流量和杂质清理设备的设备参数之间的神经网络模型,在对粮食进行杂质清理时,可以根据预期的目标清理效果自动调节粮食进入杂质清理设备的流量以及杂质清理设备的设备参数,实现了设备参数的自动调节,相较于手动调节的方式而言,提高了杂质清理的作业效率和准确性,避免了清理后的粮食杂质率不达标以及过度清理造成的质量损失,同时还避免了超量作业引起的设备故障。
技术特征:
1.一种粮食杂质清理方法,其特征在于,所述方法包括:
2.根据权利要求1所述的粮食杂质清理方法,其特征在于,所述方法还包括:
3.根据权利要求1所述的粮食杂质清理方法,其特征在于,所述杂质清理设备包括风选清理装置,所述风选清理装置的设备参数包括风速;
4.根据权利要求3所述的粮食杂质清理方法,其特征在于,所述方法还包括:
5.根据权利要求1所述的粮食杂质清理方法,其特征在于,所述杂质清理设备包括设有粗清筛网的粗清清理装置,所述粗清清理装置的设备参数包括粗清筛网的第一倾斜角度和第一运动速度,所述第一运动速度为粗清筛网的振动速度或转动速度;
6.根据权利要求5所述的粮食杂质清理方法,其特征在于,所述方法还包括:
7.根据权利要求1所述的粮食杂质清理方法,其特征在于,所述杂质清理设备包括设有精清筛网的精清清理装置,所述精清清理装置的设备参数包括精清筛网的第二倾斜角度和第二运动速度,所述第二运动速度为精清筛网的振动速度或转动速度;
8.根据权利要求7所述的粮食杂质清理方法,其特征在于,所述方法还包括:
9.一种粮食杂质清理系统,用于实现如权利要求1至8任一项所述的粮食杂质清理方法,其特征在于,所述系统包括:
10.根据权利要求9所述的粮食杂质清理系统,其特征在于,所述杂质清理设备为风选清理装置、粗清清理装置或精清清理装置,所述风选清理装置设备参数包括风速,所述粗清清理装置设备参数包括粗清筛网的第一目标倾斜角度和第一目标运动速度,所述精清清理装置的设备参数包括精清筛网的第二目标倾斜角度和第二目标运动速度。
技术总结
本申请涉及粮食储运和加工技术领域,公开了一种粮食杂质清理方法及系统,旨在解决现有粮食杂质清理方法效率低并且难以达到预期清理效果的问题,方案主要包括:构建粮食参数和清理效果与粮食流量和杂质清理设备的设备参数之间的神经网络模型,粮食参数至少包括粮食种类、水分含量、杂质含量和杂质类型;获取待清理粮食的原始粮食参数和目标清理效果,并基于神经网络模型确定目标粮食流量以及杂质清理设备的目标设备参数;在杂质清理设备对待清理粮食进行杂质清理时,将待清理粮食进入杂质清理设备的粮食流量调节至目标粮食流量,并将杂质清理设备调节至目标设备参数。本申请提高了粮食杂质清理的效率和准确性,适用于各类粮食。
技术研发人员:毛根武,邱家志,黄波,张华昌,唐文强,付迁,唐坤,曾福维,石恒,唐涛,张洪胜
受保护的技术使用者:中储粮成都储藏研究院有限公司
技术研发日:
技术公布日:2024/4/17
- 还没有人留言评论。精彩留言会获得点赞!