基于动态目标开度和动态目标转速的可变速机组控制方法与流程
本发明属于水轮机组控制领域,具体涉及一种基于动态目标开度和动态目标转速的可变速机组控制方法。
背景技术:
1、随着电力系统的发展,电力系统的负荷越来越高。水力发电系统以其发电成本低、发电效率高等优点,在我国的电力系统中占据着重要的位置。抽水蓄能电站是水电站的一种重要形式;抽水蓄能电站不仅具有水力发电系统的优点,而且还具有负荷响应快的优势。因此,在电力系统中,抽水蓄能电站主要承担调峰、调频的任务;通过调峰和调频,抽水蓄能电站有效的保证了电网的安全运行。因此,对于抽水蓄能电站的机组的控制,就显得尤为重要。
2、目前,抽水蓄能电站的机组,均采用的是传统的水电机组或定速抽水蓄能机组。这类机组由于自身的设计问题,存在低负荷下难以运行以及低负荷下效率较低的缺陷。因此,这类传统的机组已经逐步开始不再适用于现今的电力系统。
3、可变速机组是未来抽水蓄能电站的机组的最佳选择之一,其具有运行范围宽、功率可调节幅度大、稳态运行时效率极高的优点。因此,对于可变速机组的控制,就显得更加重要。但是,可变速机组的控制,如果套用之前传统机组的控制方式,则存在机组响应慢、机组机械磨损严重的问题。而且,目前我国也缺少针对可变速机组的控制方面的相关研究。
技术实现思路
1、本发明的目的在于提供一种可靠性高、稳定性好且效率较高的基于动态目标开度和动态目标转速的可变速机组控制方法。
2、本发明提供的这种基于动态目标开度和动态目标转速的可变速机组控制方法,包括如下步骤:
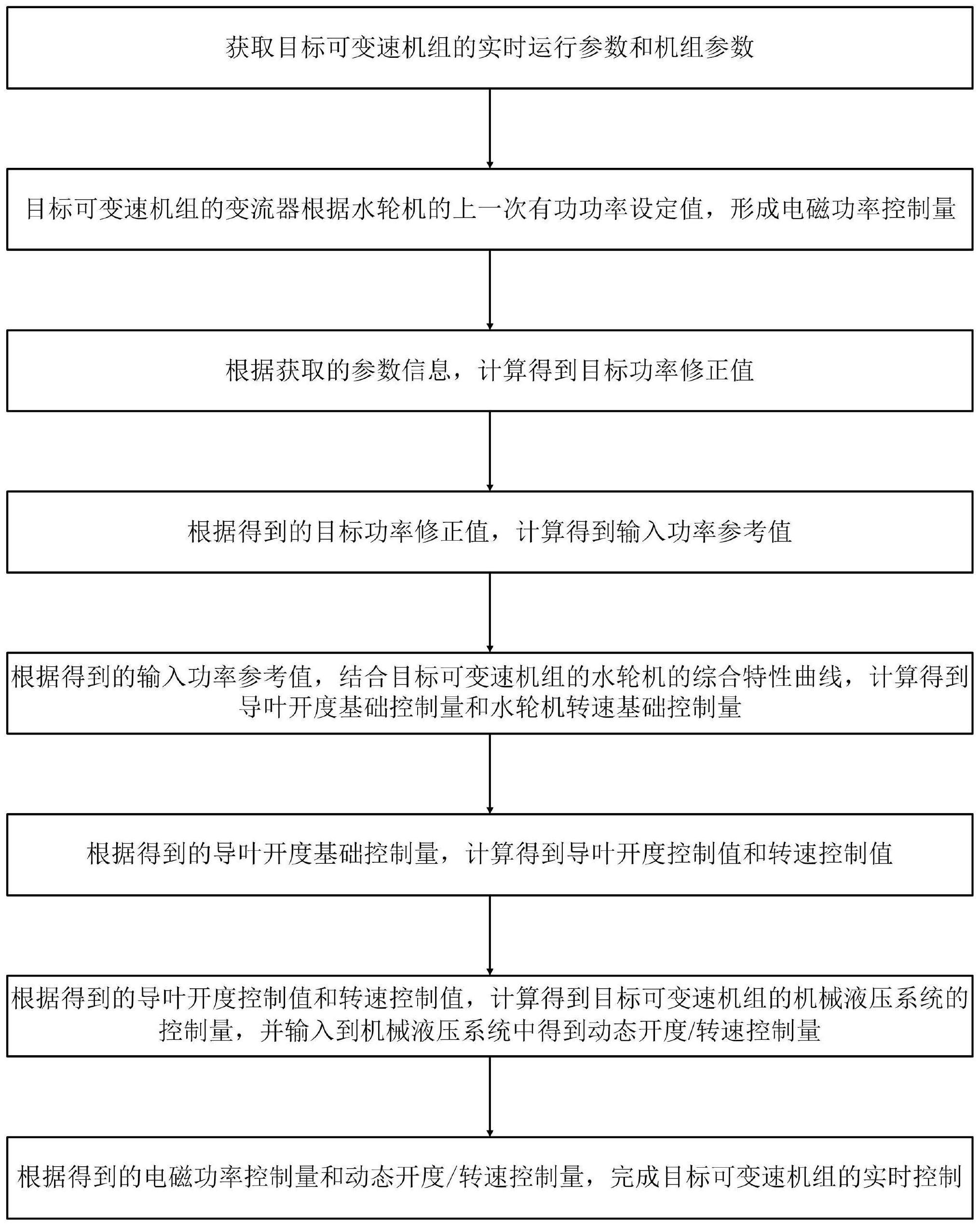
3、s1.获取目标可变速机组的实时运行参数和机组参数;
4、s2.目标可变速机组的变流器根据水轮机的上一次有功功率设定值,形成电磁功率控制量;
5、s3.根据步骤s1获取的参数信息,计算得到目标功率修正值;
6、s4.根据步骤s3得到的目标功率修正值,计算得到输入功率参考值;
7、s5.根据步骤s4得到的输入功率参考值,结合目标可变速机组的水轮机的综合特性曲线,计算得到导叶开度基础控制量和水轮机转速基础控制量;
8、s6.根据步骤s5得到的导叶开度基础控制量,计算得到导叶开度控制值;根据步骤s5得到的水轮机转速基础控制量,计算得到转速控制值;
9、s7.根据步骤s6得到的导叶开度控制值和转速控制值,计算得到目标可变速机组的机械液压系统的控制量,并输入到机械液压系统中得到动态开度/转速控制量;
10、s8.根据步骤s2得到的电磁功率控制量和步骤s7得到的动态开度/转速控制量,完成目标可变速机组的实时控制。
11、步骤s3所述的根据步骤s1获取的参数信息,计算得到目标功率修正值,具体为根据步骤s1获取的参数信息,计算得到目标功率修正值δp为δp=p-pm0,p为本次功率目标值,pm0为上次功率目标值。
12、步骤s4所述的根据步骤s3得到的目标功率修正值,计算得到输入功率参考值,具体包括如下步骤:
13、采用如下算式计算得到输入功率参考值pmrefp:
14、pmrefp=pm0-kpδx+δp
15、式中pm0为上次功率目标值;kp为转速偏差量到功率量的转换系数;δx为转速控制值;δp为目标功率修正值。
16、步骤s5所述的根据步骤s4得到的输入功率参考值,结合目标可变速机组的水轮机的综合特性曲线,计算得到导叶开度基础控制量和水轮机转速基础控制量,具体包括如下步骤:
17、根据步骤s4得到的输入功率参考值pmrefp、目标可变速机组的当前运行水头h和目标可变速机组的水轮机功率计算式计算得到中间变量q11η;再结合目标可变速机组的水轮机的综合特性曲线计算得到导叶开度基础控制量y*和水轮机转速基础控制量n*;其中,pm为水轮机功率,γ为水的重度,d1为水轮机转轮直径,q11为水轮机单位流量,η为水轮机效率,a为水轮机导叶开度,n11为水轮机单位转速。
18、步骤s6所述的根据步骤s5得到的导叶开度基础控制量,计算得到导叶开度控制值;根据步骤s5得到的水轮机转速基础控制量,计算得到转速控制值,具体包括如下步骤:
19、根据步骤s5得到的导叶开度基础控制量y*,计算得到导叶开度控制值δy为其中,amax为水轮机的导叶开度最大值,y为水轮机组的当前导叶开度值;
20、根据步骤s5得到的水轮机转速基础控制量n*,计算得到转速控制值δx为其中,h为目标可变速机组的当前运行水头h,d1为水轮机转轮直径,nr为机组额定转速,x为机组转速实测值的标幺值。
21、步骤s7所述的根据步骤s6得到的导叶开度控制值和转速控制值,计算得到目标可变速机组的机械液压系统的控制量,具体为根据步骤s6得到的导叶开度控制值δy和转速控制值δx,采用pid控制算法分别对导叶开度控制值δy和转速控制值δx进行计算,并将计算结果相加,从而得到目标可变速机组的机械液压系统的控制量。
22、本发明提供的这种基于动态目标开度和动态目标转速的可变速机组控制方法,在调节过程中同时采用动态目标开度和动态目标转速进行机组出力调节,减小了负荷调节过程中的转速误差、开度误差,使得水轮机在动态调节过程中维持在不同开度下的最佳效率点附近,提高了动态响应过程中水轮机运行效率、减小了水轮机出力动态调节过程中水锤效应,提高了动态调节中水电机组的稳定性,而且本发明的可靠性高、稳定性好且效率较高。
技术特征:
1.一种基于动态目标开度和动态目标转速的可变速机组控制方法,包括如下步骤:
2.根据权利要求1所述的基于动态目标开度和动态目标转速的可变速机组控制方法,其特征在于步骤s3所述的根据步骤s1获取的参数信息,计算得到目标功率修正值,具体为根据步骤s1获取的参数信息,计算得到目标功率修正值δp为δp=p-pm0,p为本次功率目标值,pm0为上次功率目标值。
3.根据权利要求2所述的基于动态目标开度和动态目标转速的可变速机组控制方法,其特征在于步骤s4所述的根据步骤s3得到的目标功率修正值,计算得到输入功率参考值,具体包括如下步骤:
4.根据权利要求3所述的基于动态目标开度和动态目标转速的可变速机组控制方法,其特征在于步骤s5所述的根据步骤s4得到的输入功率参考值,结合目标可变速机组的水轮机的综合特性曲线,导叶开度基础控制量和水轮机转速基础控制量,具体包括如下步骤:
5.根据权利要求4所述的基于动态目标开度和动态目标转速的可变速机组控制方法,其特征在于步骤s6所述的根据步骤s5得到的导叶开度基础控制量,计算得到导叶开度控制值;根据步骤s5得到的水轮机转速基础控制量,计算得到转速控制值,具体包括如下步骤:
6.根据权利要求5所述的基于动态目标开度和动态目标转速的可变速机组控制方法,其特征在于步骤s7所述的根据步骤s6得到的导叶开度控制值和转速控制值,计算得到目标可变速机组的机械液压系统的控制量,具体为根据步骤s6得到的导叶开度控制值δy和转速控制值δx,采用pid控制算法分别对导叶开度控制值δy和转速控制值δx进行计算,并将计算结果相加,从而得到目标可变速机组的机械液压系统的控制量。
技术总结
本发明公开了一种基于动态目标开度和动态目标转速的可变速机组控制方法,包括获取实时运行参数和机组参数;变流器形成电磁功率控制量;计算得到目标功率修正值;计算得到输入功率参考值;计算导叶开度基础控制量和水轮机转速基础控制量;计算得到导叶开度控制值和转速控制值;计算得到机械液压系统的控制量并输入到机械液压系统中得到动态开度/转速控制量;根据电磁功率控制量和动态开度/转速控制量完成目标可变速机组的实时控制。本发明在调节过程中同时采用动态目标开度和动态目标转速进行机组出力调节,减小了负荷调节过程中的转速误差和开度误差,提高了运行效率、减小了水锤效应,提高了稳定性,而且可靠性高、稳定性好且效率较高。
技术研发人员:寇攀高
受保护的技术使用者:国网湖南省电力有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!