一种基于状态观测器的组合喷管自适应协同控制方法与流程
本申请属于航空发动机变量控制领域,特别涉及一种基于状态观测器的组合喷管自适应协同控制方法。
背景技术:
1、近年来,轴对称矢量喷管、二元推力矢量喷管和单边膨胀二元喷管的技术日趋成熟,大大缩短了中国在航空发动机领域与世界先进水平的差距。随着国内对空天战略飞机推进系统的需求越来越迫切,使得组合喷管逐步成为国内研究的热点,如图1所示,7截面为组合喷管涡轮基通道进口;8截面为组合喷管涡轮基通道喉部。组合喷管新结构形式对控制系统的研制产生了极大的挑战。组合喷管控制主要包括组合喷管控制器、涡轮前调板控制装置、涡轮后调板控制装置、冲压调板控制装置、涡轮前调板液压作动筒、涡轮后调板液压作动筒、冲压调板液压作动筒,电缆等。组合喷管控制系统为比较典型的位置伺服系统,控制对象为各个回路作动筒的位移,其中涡轮前调板作动筒和涡轮后调板为相互独立的控制回路,以保证喷口喉部面积按控制计划调节。
2、在涡轮基喷管单独工作阶段和组合动力共同工作阶段,涡轮基前调板和后调节板在8截面引射缝隙宽度不大于控制计划,且不能互相碰磨。
3、目前航空发动机领域是独立控制涡轮前调板、涡轮后调板和冲压跳板各回路作动筒位移的控制方案。控制回路架构如图2所示,在这种架构下,涡轮前调板作动筒和涡轮后调板作动筒在涡轮发动机工作时无协同控制功能,极端情况下,涡轮前调板和涡轮后调板还会出现碰磨,影响组合动力正常工作。
4、因此,希望有一种技术方案来克服或至少减轻现有技术的至少一个上述缺陷。
技术实现思路
1、本申请的目的是提供了一种基于状态观测器的组合喷管自适应协同控制方法,以解决现有技术存在的至少一个问题。
2、本申请的技术方案是:
3、一种基于状态观测器的组合喷管自适应协同控制方法,包括:
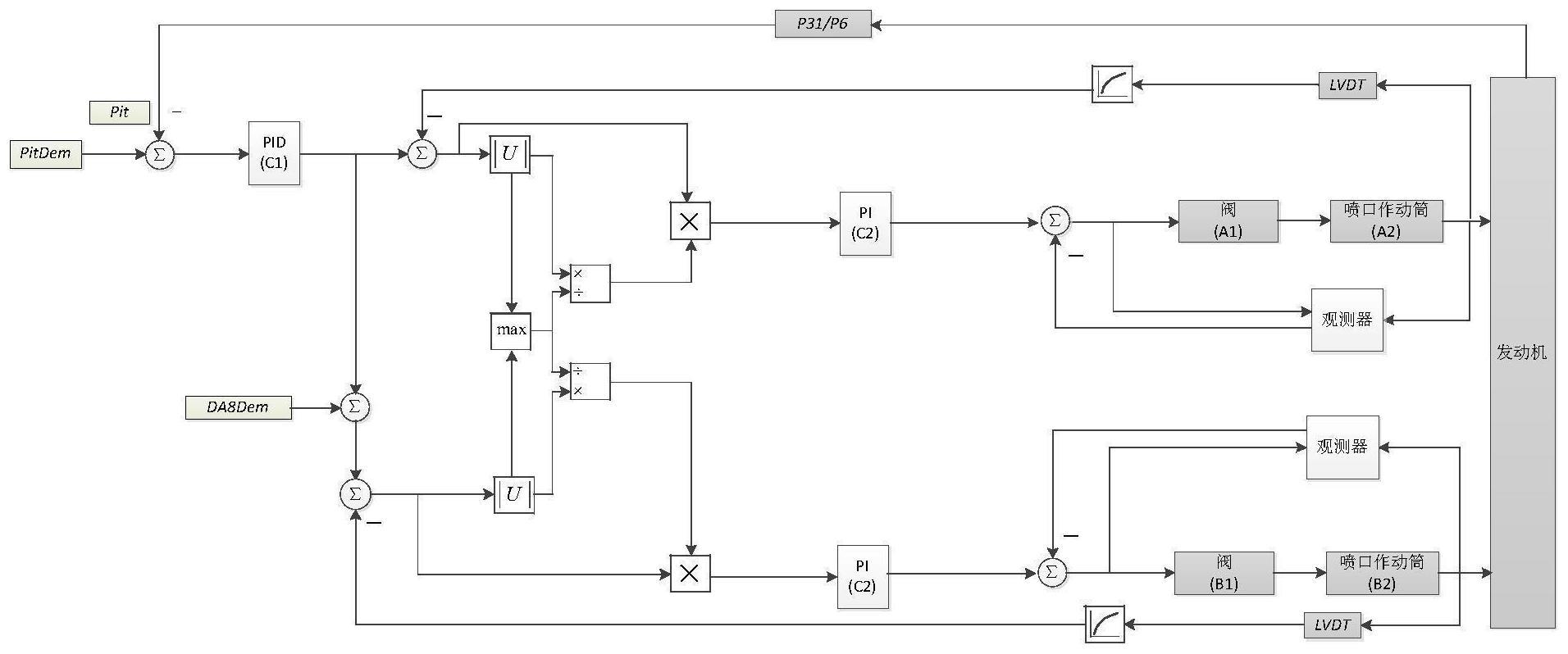
4、步骤一、获取pit闭环控制目标值pit_dem以及发动机压力传感器采集到的发动机落压比p31/p6,计算pit闭环控制目标值pit_dem与发动机落压比p31/p6的差值,得到pit控制偏差,根据pid算法得到涡轮前调板面积控制目标值a81_dem;
5、步骤二、获取控制偏差计划值da8dem,将所述控制偏差计划值da8dem与所述涡轮前调板面积控制目标值a81_dem求和,得到涡轮后调板面积控制目标值a82_dem;
6、步骤三、获取发动机位移传感器采集到的涡轮前调板作动筒位移la81,结合作动筒与面积对应关系计算出涡轮前调板面积反馈值a81;
7、获取发动机位移传感器采集到的涡轮后调板作动筒位移la82,结合作动筒与面积对应关系计算出涡轮后调板面积反馈值a82;
8、步骤四、计算所述涡轮前调板面积控制目标值a81_dem与所述涡轮前调板面积反馈值a81差值的绝对值,以及所述涡轮后调板面积控制目标值a82_dem与所述涡轮后调板面积反馈值a82差值的绝对值,并对两个绝对值进行取大逻辑运算:
9、max_e=max{|a81_dem-a81|,|a82_dem-a82|}
10、计算a81偏差修正系数k81以及a82偏差修正系数k82:
11、k81=|a81_dem-a81|/max_e
12、k82=|a82_dem-a82|/max_e
13、步骤五、计算涡轮前调板面积控制回路偏差e_a81和涡轮后调板面积控制回路偏差e_a82;
14、e_a81=k81·(a81_dem-a81)
15、e_a82=k82·(a82_dem-a82)
16、步骤六、根据所述涡轮前调板面积控制回路偏差e_a81以及pi算法得到涡轮前调板控制回路电流初值ia81_dem0;
17、根据所述涡轮后调板面积控制回路偏差e_a82以及pi算法得到涡轮后调板控制回路电流初值ia82_dem0;
18、步骤七、获取涡轮前调板控制补偿ia81o以及涡轮后调板控制补偿ia82o;
19、步骤八、计算所述涡轮前调板控制回路电流初值ia81_dem0与所述涡轮前调板控制补偿ia81o的差值,得到涡轮前调板控制阀控制电流最终值ia81;
20、计算所述涡轮后调板控制回路电流初值ia82_dem0与所述涡轮后调板控制补偿ia82o的差值,得到涡轮后调板控制阀控制电流最终值ia82;
21、步骤九、通过所述涡轮前调板控制阀控制电流最终值ia81驱动涡轮前调板控制阀输出的流量,实现对涡轮前调板作动筒位移la81的控制;
22、通过所述涡轮后调板控制阀控制电流最终值ia82涡轮后调板控制阀输出的流量,实现对涡轮后调板作动筒位移la82的控制。
23、在本申请的至少一个实施方式中,步骤一中,所述根据pid算法得到涡轮前调板面积控制目标值a81_dem为:
24、
25、其中,kp为比例系数,ti为积分常数,td为微分常数。
26、在本申请的至少一个实施方式中,步骤六中,所述根据所述涡轮前调板面积控制回路偏差e_a81以及pi算法得到涡轮前调板控制回路电流初值ia81_dem0为:
27、
28、所述根据所述涡轮后调板面积控制回路偏差e_a82以及pi算法得到涡轮后调板控制回路电流初值ia82_dem0为:
29、
30、其中,kp为比例系数,ti为积分常数。
31、在本申请的至少一个实施方式中,步骤七中,所述获取涡轮前调板控制补偿ia81o包括:
32、构建涡轮前调板执行机构模型,结构为:
33、ga=k/s(ts+1)
34、时域描述为:
35、
36、其中,f(δ)为不确定性因子,取扩张状态x3=f(δ);
37、设计涡轮前调板执行机构扩张状态观测器:
38、
39、涡轮前调板控制补偿为:
40、
41、其中,k为回路开环增益,t为电液转换装置时间常数,s为变换因子,β1、β2、β3均为控制参数,z1跟踪x1,z2跟踪x2,z3跟踪x3。
42、发明至少存在以下有益技术效果:
43、本申请的基于状态观测器的组合喷管自适应协同控制方法,能够实现涡轮前调板作动筒和涡轮后调板作动筒协同控制需求,既保证不碰磨,又保障引射面积小。
技术特征:
1.一种基于状态观测器的组合喷管自适应协同控制方法,其特征在于,包括:
2.根据权利要求1所述的基于状态观测器的组合喷管自适应协同控制方法,其特征在于,步骤一中,所述根据pid算法得到涡轮前调板面积控制目标值a81_dem为:
3.根据权利要求2所述的基于状态观测器的组合喷管自适应协同控制方法,其特征在于,步骤六中,所述根据所述涡轮前调板面积控制回路偏差e_a81以及pi算法得到涡轮前调板控制回路电流初值ia81_dem0为:
4.根据权利要求3所述的基于状态观测器的组合喷管自适应协同控制方法,其特征在于,步骤七中,所述获取涡轮前调板控制补偿ia81o包括:
技术总结
本申请属于航空发动机变量控制领域,特别涉及一种基于状态观测器的组合喷管自适应协同控制方法。本申请通过涡轮前调板控制和涡轮后调板控制电流值分别驱动涡轮前调板和涡轮后调板控制阀输出的流量,实现涡轮前调板和涡轮后调板作动筒位移LA<subgt;81</subgt;和LA<subgt;82</subgt;的控制,进而影响涡轮前调板和后调板的面积A<subgt;81</subgt;和A<subgt;82</subgt;,最终发动机的气动参数P<subgt;31</subgt;/P<subgt;6</subgt;也会随之改变。本申请通过比例偏差自适应修正与状态观测器补偿控制结合实现涡轮基喷管前调板和后调板两独立回路协同控制。A<subgt;81</subgt;和A<subgt;82</subgt;的位置通过比例偏差自适应修正,进而实现A<subgt;81</subgt;和A<subgt;82</subgt;协同控制;当控制过程中存在干扰,通过状态观测器得到负载变化等干扰量观测值,并转化为控制电流补偿量,提升A<subgt;81</subgt;和A<subgt;82</subgt;协同控制精度。
技术研发人员:李文涛,尹珑翔,哈菁,王钊,苏东旭,李利,李杰杰,刘凯
受保护的技术使用者:中国航发沈阳发动机研究所
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!