确定风力涡轮机的塔顶加速度的制作方法
本发明涉及确定风力涡轮机(wind turbine)的塔顶部的加速度。特别地,该确定包括通过使用来自多个风力涡轮机加速度传感器的测量结果(measurements),对预测加速度进行更新来估计在当前时间步长的加速度,该预测加速度是基于来自前一时间步长的估计加速度并且基于风力涡轮机的运动学(kinematic)模型来确定的。
背景技术:
1、重要的是能够获得风力涡轮机、特别是风力涡轮机塔的顶部或者风力涡轮机机舱的加速度的准确测量结果。这允许风力涡轮机被监测以用于高效且安全运行。例如,可以将加速度测量结果用于检测对风力涡轮机组件的损坏的开始,或者在某些风况下塔振荡何时达到临界水平。基于这种加速度测量结果的塔顶加速度的主动阻尼可以导致有关风力涡轮机中所需的材料的节省,从而提供有关成本和重量的节省。
2、用于测量风力涡轮机塔加速度的已知布置可能遭受某些缺点。在一个示例中,风力涡轮机设置有位于风力涡轮机塔的顶部处的加速度计,例如,用于测量风力涡轮机的前/后方向和侧/侧方向上的加速度的双轴加速度计。
3、例如,在风力涡轮机的偏航系统未被充分润滑的情况下,这样的布置可能易受偏航所致的振动影响,而这可能导致不准确的加速度测量结果。这种布置还可能遭受由布置的组件中的缺陷所造成的dc偏移或漂移,这也降低了测量准确度。
4、已知布置还可能只适用于风力涡轮机的控制域。控制域中的测量结果可以被用于控制风力涡轮机,以最大化发电效率并且减少风力涡轮机组件上的载荷。另一方面,安全域中的测量结果可以被用于确定风力涡轮机的安全控制器何时需要采取对风力涡轮机的控制,例如,使涡轮机停止运转。为了适用于安全域,布置可能需要是弹性的并且对于组件的不准确性或失效是鲁棒的。
5、本发明正是针对这一背景而提出的。
技术实现思路
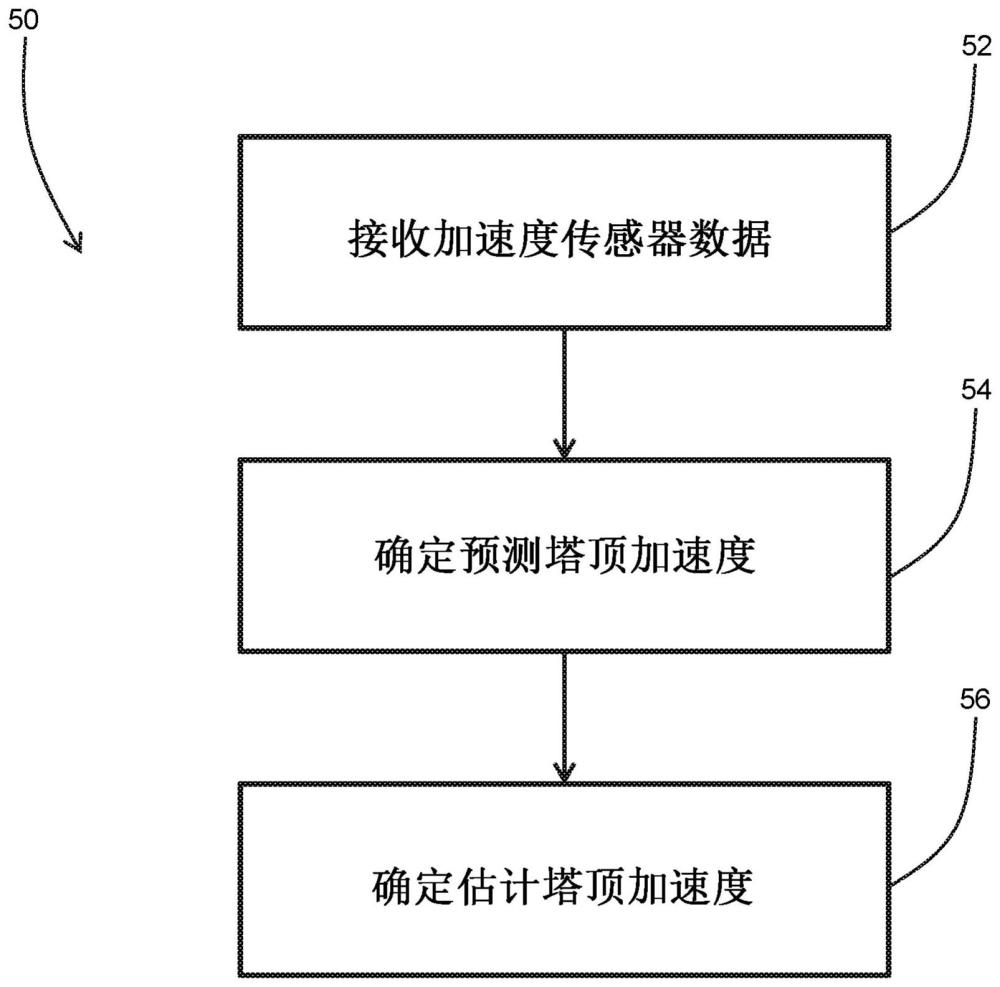
1、根据本发明的一方面,提供了一种确定风力涡轮机的塔顶加速度的方法。该风力涡轮机包括塔、塔顶上的机舱、以及位于机舱中的多个加速度传感器。所述方法包括以下步骤:从多个加速度传感器接收加速度数据,该加速度数据包括指示在当前时间步长所测得的在沿着各个相应加速度传感器的至少一个测量轴线的方向上的加速度的数据。所述方法包括以下步骤:确定风力涡轮机塔在当前时间步长的预测塔顶加速度。预测塔顶加速度是根据风力涡轮机的运动学模型来确定的,该运动学模型是基于各个加速度传感器相对于被限定为塔的顶部的点的位置和取向的。预测塔顶加速度还根据所确定的在前一时间步长对塔顶加速度的估计来确定。所述方法包括以下步骤:通过基于来自多个加速度传感器中的各个加速度传感器的所测得的加速度对预测塔顶加速度进行更新,来确定风力涡轮机塔在当前时间步长的估计塔顶加速度。
2、预测塔顶加速度和估计塔顶加速度可以根据卡尔曼(kalman)滤波算法来确定。
3、预测塔顶加速度和估计塔顶加速度可以包括风力涡轮机塔在至少一个线性方向上的线性加速度。
4、所述至少一个线性方向可以包括风力涡轮机的侧/侧方向、风力涡轮机的前/后方向、以及风力涡轮机的上/下方向中的至少一者。
5、预测塔顶加速度和估计塔顶加速度可以包括风力涡轮机塔在至少一个扭转方向上的扭转加速度。
6、各个加速度计皆可以是多轴加速度计,该多轴加速度计被配置成测量沿着多个相互垂直的轴线的加速度。所接收的加速度数据可以包括指示在当前时间步长所测得的沿着各个相应加速度传感器的多个测量轴线的塔顶加速度的数据。
7、被限定为塔的顶部的点可以在机舱中。
8、被限定为塔的顶部的点可以在由塔限定的轴线上。
9、所述方法包括以下步骤:确定来自多个加速度传感器的测得的各个相应加速度的权重。预测塔顶加速度可以基于来自加速度传感器中的各个加速度传感器的所测得的加速度根据所确定的这些加速度的相应权重来更新。
10、确定来自加速度传感器中的一个加速度传感器的所测得的加速度的权重可以基于风力涡轮机塔在前一时间步长的估计塔顶加速度与基于来自相应加速度传感器的所测得的加速度对塔顶加速度的估计之间的比较。
11、如果该比较指示在前一时间步长的估计塔顶加速度与基于加速度传感器中的一个加速度传感器对塔顶加速度的估计之间的差超过预定义阈值,则可以将来自所述加速度传感器的所测得的加速度从对估计塔顶加速度的确定中省略。
12、可以将加速度传感器嵌入风力涡轮机的控制系统的相应节点或控制器中,这些节点或控制器被分布在机舱中。
13、控制系统可以是分布式控制系统,该分布式控制系统包括可以根据时间触发以太网(time-triggered ethernet,tte)标准操作的通信骨干网(communication backbone)。
14、根据本发明的另一方面,提供了一种存储有指令的非暂时性计算机可读存储介质,该指令在由一个或更多个处理器执行时,使一个或更多个处理器执行如上所述的方法。
15、根据本发明的另一方面,提供了一种风力涡轮机的控制系统。该风力涡轮机包括塔、塔顶上的机舱、以及位于机舱中的多个加速度传感器。该系统包括计算机处理器,该计算机处理器被配置成从多个加速度传感器接收加速度数据,该加速度数据包括指示在当前时间步长所测得的在沿着各个相应加速度传感器的至少一个测量轴线的方向上的加速度的数据。该处理器被配置成确定风力涡轮机塔在当前时间步长的预测塔顶加速度,预测塔顶加速度是根据风力涡轮机的运动学模型来确定的,该运动学模型是基于各个加速度传感器相对于被限定为塔的顶部的点的位置和取向的,并且预测塔顶加速度是根据所确定的在前一时间步长对塔顶加速度的估计来确定的。该处理器被配置成通过基于来自多个加速度传感器中的各个加速度传感器的所测得的加速度对预测塔顶加速度进行更新,来确定风力涡轮机塔在当前时间步长的估计塔顶加速度。
16、该控制系统可以是风力涡轮机的安全控制系统。
17、根据本发明的另一方面,提供了一种包括如上限定的控制系统的风力涡轮机。
技术特征:
1.一种确定风力涡轮机的塔顶加速度的方法,所述风力涡轮机包括塔、所述塔顶上的机舱、以及位于所述机舱中的多个加速度传感器,所述方法包括以下步骤:
2.根据权利要求1所述的方法,其中,所述预测塔顶加速度和估计塔顶加速度是根据卡尔曼滤波算法来确定的。
3.根据权利要求1或权利要求2所述的方法,其中,所述预测塔顶加速度和估计塔顶加速度包括所述风力涡轮机的塔在至少一个线性方向上的线性加速度。
4.根据权利要求3所述的方法,其中,所述至少一个线性方向包括所述风力涡轮机的侧/侧方向、所述风力涡轮机的前/后方向、以及所述风力涡轮机的上/下方向中的至少一者。
5.根据任一前述权利要求所述的方法,其中,所述预测塔顶加速度和估计塔顶加速度包括所述风力涡轮机的塔在至少一个扭转方向上的扭转加速度。
6.根据任一前述权利要求所述的方法,其中,各个加速度计皆是多轴加速度计,所述多轴加速度计被配置成测量沿着多个相互垂直的轴线的加速度,并且其中,所接收的加速度数据包括指示在所述当前时间步长所测得的沿着各个相应加速度传感器的多个测量轴线的塔顶加速度的数据。
7.根据任一前述权利要求所述的方法,其中,被限定为所述塔的顶部的所述点在所述机舱中。
8.根据任一前述权利要求所述的方法,其中,被限定为所述塔的顶部的所述点在由所述塔限定的轴线上。
9.根据任一前述权利要求所述的方法,其中,所述方法包括以下步骤:确定来自所述多个加速度传感器的所测得的各个相应加速度的权重,并且其中,所述预测塔顶加速度是基于来自所述加速度传感器中的各个加速度传感器的所测得的加速度根据这些加速度的所确定的相应权重来更新的。
10.根据权利要求9所述的方法,其中,确定来自所述加速度传感器中的一个加速度传感器的所测得的加速度的所述权重是基于所述风力涡轮机的塔在所述前一时间步长的估计塔顶加速度与基于来自所述相应加速度传感器的所测得的加速度对塔顶加速度的估计之间的比较的。
11.根据权利要求10所述的方法,其中,如果所述比较指示在所述前一时间步长的估计塔顶加速度与基于所述加速度传感器中的一个加速度传感器所述对塔顶加速度的估计之间的差超过预定义阈值,则将来自所述加速度传感器的所测得的加速度从对所述估计塔顶加速度的确定中省略。
12.根据任一前述权利要求所述的方法,其中,所述加速度传感器被嵌入所述风力涡轮机的控制系统的相应节点中,所述节点被分布在所述机舱中。
13.根据任一前述权利要求所述的方法,其中,所述控制系统是分布式控制系统,所述分布式控制系统包括能够根据时间触发以太网(tte)标准操作的通信骨干网。
14.一种风力涡轮机的控制系统,所述风力涡轮机包括塔、所述塔顶上的机舱、以及位于所述机舱中的多个加速度传感器,并且所述系统包括计算机处理器,所述计算机处理器被配置成:
15.一种风力涡轮机,所述风力涡轮机包括根据权利要求14所述的控制系统。
技术总结
本发明提供了一种确定风力涡轮机的塔顶加速度的方法。该方法包括:从位于风力涡轮机的机舱中的多个加速度传感器接收加速度数据,该加速度数据包括指示在当前时间步长所测得的在沿着各个相应加速度传感器的至少一个测量轴线的方向上的加速度的数据。该方法包括:确定风力涡轮机塔在当前时间步长的预测塔顶加速度,该预测塔顶加速度是根据风力涡轮机的运动学模型并且是根据在前一时间步长对塔顶加速度的所确定估计来确定的。该方法包括:通过基于来自加速度传感器中的各个加速度传感器的所测得的加速度对预测塔顶加速度进行更新,来确定风力涡轮机塔在当前时间步长的估计塔顶加速度。
技术研发人员:K·奇伯,J·索曼
受保护的技术使用者:维斯塔斯风力系统有限公司
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!