一种风电机组的控制方法、风电机组控制系统及风电机组与流程
本发明涉及风电控制,具体涉及一种风电机组的控制方法、风电机组控制系统及风电机组。
背景技术:
1、目前,在风电机组的控制中经常会用到pid计算(也可称为pid控制),pid计算由比例控制、积分控制和微分控制组成。示例的,桨距角的控制中需要使用到pid计算。如图1所示,桨距角pid控制器的输入信号是风电机组的误差值,经过桨距角pid控制器的pid计算之后得到桨距角的位置指令,并将该位置指令发送至变桨执行机构。
2、由于微分控制对输入信号的波动有放大作用,所以当输入信号波动时,位置指令的输出会存在异常增大或异常减小的现象。
3、申请公布号为cn113847202 a的发明专利申请公开了一种风电机组变桨稳转速控制系统,包括:编码器模块、卡尔曼滤波器、非线性微分跟踪器、比较器、pid控制器和风力矩估算模块。所述编码器模块获取发电机的转速信号并发送至所述卡尔曼滤波器;所述卡尔曼滤波器还接收发电机电磁转矩反馈值和所述风力矩估算模块的风力矩估计值,并进行滤波处理,并将滤波后的所述转速信号发送至所述非线性微分跟踪器;所述非线性微分跟踪器对滤波后的所述转速信号再次滤波处理后,得到所述转速信号反馈值并发送至所述比较器;所述比较器将所述转速信号反馈值与转速预设值进行比较,得到所述误差值值并将其发送至所述pid控制器;所述pid控制器接收所述非线性微分跟踪器发送的转速微分信号,并依据所述误差值值得到风轮的变桨控制指令,并将其发送至风电机组的变桨控制系统;所述风力矩估算模块依据所述变桨控制指令、桨距角反馈值和所述风轮的风力矩检测值计算所述风力矩估计值。
4、但是,采用上述发明专利申请的方案进行控制时,位置指令的输出仍然存在异常增大或异常减小的现象。
技术实现思路
1、有鉴于此,本发明实施例提供了一种风电机组的控制方法风电机组控制系统及风电机组,以解决风电机组的控制指令产生异常增大或异常减小的问题。
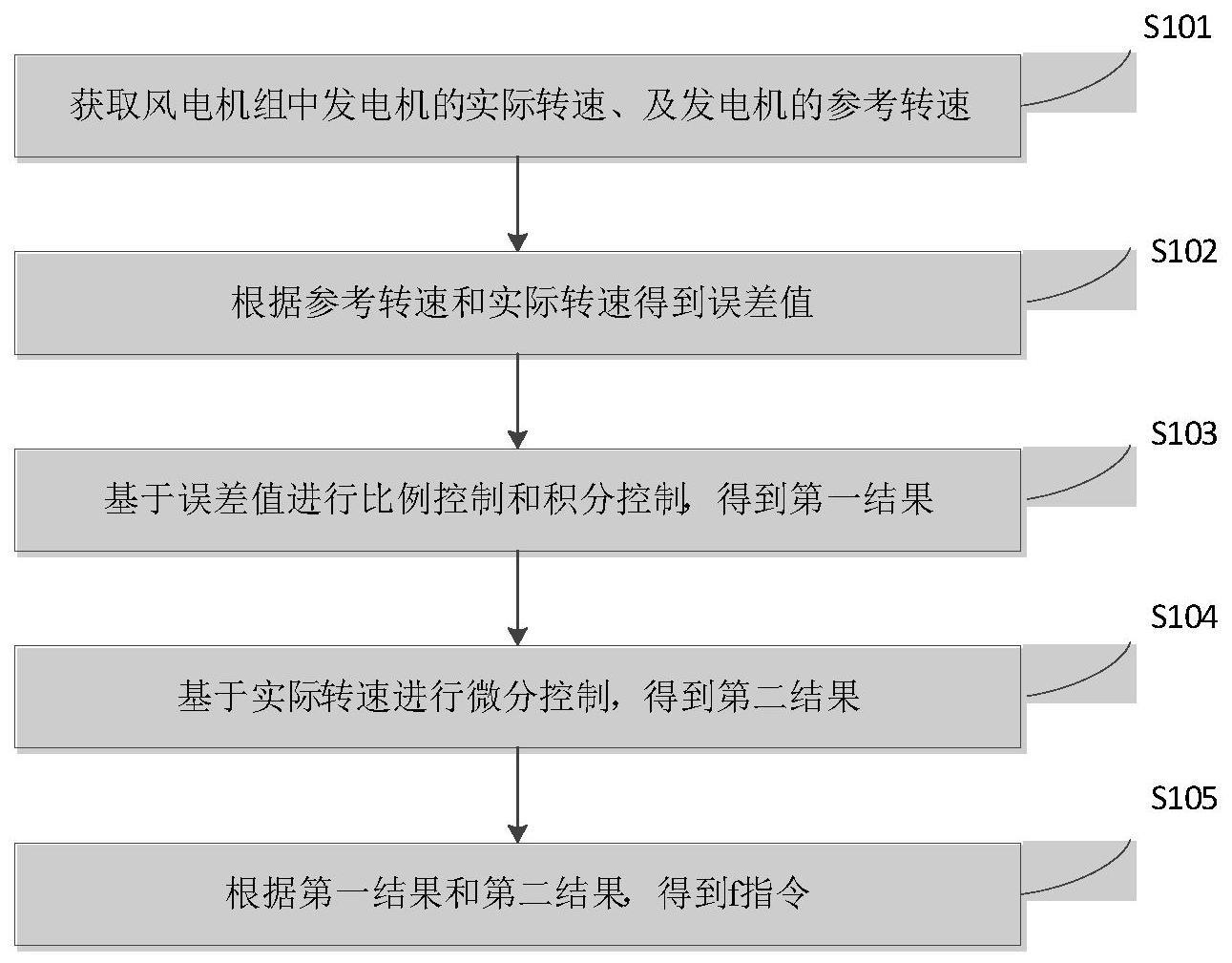
2、根据第一方面,本发明实施例提供了一种风电机组的控制方法,包括以下步骤:获取风电机组中发电机的实际转速、及与所述发电机参考转速;根据所述参考转速和所述实际转速得到误差值;基于所述误差值进行比例控制和积分控制,得到第一结果;基于所述实际转速进行微分控制,得到第二结果;根据所述第一结果和所述第二结果,得到风电机组的控制指令。
3、具体的,所述基于所述误差值进行比例控制和积分控制,得到第一结果包括:基于所述误差值,利用预设的第一公式进行比例控制和积分控制,得到所述第一结果;所述第一公式为:y1=kp×e+ki∫edt,y1表示所述第一结果,kp表示比例系数,e表示所述误差值,ki表示积分系数。
4、具体的,所述基于所述实际转速进行微分控制,得到第二结果包括:
5、基于所述实际转速,利用预设的第二公式进行微分控制,得到所述第二结果;所述第二公式为:y2表示所述第二结果,kd表示微分系数,ω表示所述实际转速。
6、具体的,所述根据所述第一结果和所述第二结果,得到风电机组的控制指令包括:将所述第一结果和所述第二结果相加,得到所述风电机组的控制指令。
7、具体的,根据所述第一结果和所述第二结果,得到风电机组的控制指令之前,还包括:对所述第二结果进行滤波处理。
8、具体的,在基于所述误差值进行比例控制和积分控制,得到第一结果之后,还包括:对所述第一结果进行离散化处理;在基于所述实际转速进行微分控制,得到第二结果之后,还包括:对所述第二结果进行离散化处理;在根据所述第一结果和所述第二结果,得到风电机组的控制指令之后,还包括:对所述风电机组的控制指令进行离散化处理。
9、具体的,所述实际转速为实际转速,所述参考转速为参考转速,所述风电机组的控制指令为桨距角的控制指令。
10、根据第二方面,本发明实施例还提供了一种风电机组的控制装置,所述风电机组的控制装置包括获取模块、误差值确定模块、第一处理模块、第二处理模块和第三处理模块,其中所述获取模块用于获取风电机组中发电机的实际转速、及与所述发电机的参考转速;所述误差值确定模块用于根据所述参考转速和所述实际转速得到误差值;所述第一处理模块用于基于所述误差值进行比例控制和积分控制,得到第一结果;所述第二处理模块用于基于所述实际转速进行微分控制,得到第二结果;所述第三处理模块用于根据所述第一结果和所述第二结果,得到风电机组的控制指令。
11、根据第三方面,本发明实施例还提供了一种电子设备,包括存储器和处理器,所述存储器和所述处理器之间互相通信连接,所述存储器中存储有计算机指令,所述处理器通过执行所述计算机指令,从而执行第一方面或者第一方面的任意一种实施方式中所述的风电机组的控制方法。
12、根据第四方面,本发明实施例还提供了一种风电机组控制系统,包括:实际转速传感器、指令执行机构和第三方面所述的电子设备,其中,所述实际转速传感器与所述电子设备通信连接,用于获取风电机组的实际转速,并发送至所述电子设备;所述指令执行机构与所述电子设备通信连接,用于接收所述电子设备的控制指令,并执行。
13、根据第五方面,本发明实施例提供了一种风电机组,包括第四方面所述的风电机组控制系统。
14、本发明实施例提供的风电机组的控制方法风电机组控制系统及风电机组,针对风电机组的逻辑进行改造,将风电机组分成pi计算(也可称为比例控制和积分控制)和d计算(也可称为微分控制)两个部分,在分别计算出第一结果和第二结果后,将第一结果和第二结果相加作为最终的控制指令。其将pid计算分成pi计算和d计算两个部分,并基于实际转速进行d计算,由此可以消除参考转速的变化对微分控制的影响,解决了风电机组的控制指令产生异常增大或异常减小的问题。
15、进一步的,在根据所述第一结果和所述第二结果,得到桨距角的控制指令之前,还包括对所述第二结果进行滤波处理。由此可以降低转速传感器的测量噪声对微分计算的影响。
技术特征:
1.一种风电机组的控制方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述基于所述误差值进行比例控制和积分控制,得到第一结果包括:
3.根据权利要求1所述的方法,其特征在于,所述基于所述实际转速进行微分控制,得到第二结果包括:
4.根据权利要求1所述的方法,其特征在于,所述根据所述第一结果和所述第二结果,得到风电机组的控制指令包括:
5.根据权利要求1所述的方法,其特征在于,根据所述第一结果和所述第二结果,得到风电机组的控制指令之前,还包括:
6.根据权利要求1所述的方法,其特征在于,在基于所述误差值进行比例控制和积分控制,得到第一结果之后,还包括:
7.一种风电机组的控制装置,其特征在于,包括:
8.一种电子设备,其特征在于,包括:
9.一种风电机组控制系统,其特征在于,包括:
10.一种风电机组,其特征在于,包括权利要求9所述的风电机组控制系统。
技术总结
本发明公开了一种风电机组的控制方法、风电机组控制系统及风电机组,其中风电机组的控制方法包括:获取风电机组中发电机的实际转速、及所述发电机的参考转速;根据所述参考转速和所述实际转速得到误差值;基于所述误差值进行比例控制和积分控制,得到第一结果;基于所述实际转速进行微分控制,得到第二结果;根据所述第一结果和所述第二结果,得到风电机组的控制指令。其将PID计算分成PI计算和D计算两个部分,并基于实际转速进行D计算,由此可以消除参考转速的变化对微分控制的影响,解决了风电机组的控制指令产生异常增大或异常减小的问题。
技术研发人员:杜佳佳,高坤
受保护的技术使用者:三一重能股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!