一种具有风机塔筒攀爬功能的机器人的制作方法
本技术涉及机器人,具体为一种具有风机塔筒攀爬功能的机器人。
背景技术:
1、随着我国风电设施的大量普及,风电塔筒维护的工程量随之加大,由于塔筒高度和体积较大,在风电塔筒表面进行清洁、防腐除锈等维护工作往往需要人工高空作业,人工高空作业中存在受天气等因素影响大,作业风险高、费用高等问题,且高空作业效率较低,因此,市面上诞生了一种具有风机塔筒攀爬功能的机器人来代替人工进行风电塔筒维护的维护作业。
2、在专利授权公告号为cn217129703u的实用新型专利中公布了一种具有风机塔筒攀爬功能的机器人,包括控制主仓,所述控制主仓的两侧位置均安装有齿轮,且齿轮的外部啮合连接有永磁式磁性履带,所述永磁式磁性履带的正前方位置覆盖有侧挡板,本实用新型中,通过设置的中心齿轮、滚珠丝杆、水平挡板、侧挡板、控制主仓和转接头,在水平挡板和侧挡板实现反向的向外拉伸动作且被拉伸到合适位置后,一组侧挡板将会联合水平挡板,分别从磁性履带的正上方位置起到一定的防暴晒保护的作用,通过能够利用可自由拉伸的防暴晒结构在预先对磁性履带进行外保护处理,可有效地避免受到暴晒作用后的磁性履带因润滑剂的快速消散,导致自身受到严重的磨损。
3、但是,现有的具有风机塔筒攀爬功能的机器人也存在一定的不足,首先,现有的具有风机塔筒攀爬功能的机器人仅采用永磁性履带进行攀爬作业,由于机体自身重力及外界风力等因素的影响,导致机体的攀爬稳定性弱,其次,现有的具有风机塔筒攀爬功能的机器人只是简单的采用安置架对携带的工件进行安置使用,由于振动等因素的影响,导致工件的安置稳定性弱。
技术实现思路
1、本实用新型的目的在于提供一种具有风机塔筒攀爬功能的机器人,解决了现有的具有风机塔筒攀爬功能的机器人仅采用永磁性履带进行攀爬作业,由于机体自身重力及外界风力等因素的影响,导致机体的攀爬稳定性弱,并解决了现有的具有风机塔筒攀爬功能的机器人只是简单的采用安置架对携带的工件进行安置使用,由于振动等因素的影响,导致工件的安置稳定性弱的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种具有风机塔筒攀爬功能的机器人,包括机体,所述机体上设置有驱动轮,所述驱动轮上设置有磁性履带,所述机体上设置有压紧轮,所述压紧轮与磁性履带接触,所述机体的上端固定连接有安置架,所述机体上固定连接有安装筒;
3、所述安装筒内固定安装有电磁铁,所述电磁铁与机体接触,所述电磁铁内滑动连接有连接杆,所述连接杆与机体滑动连接,所述连接杆的下端固定连接有强磁吸盘器,所述安装筒内固定连接有固定环,所述固定环与连接杆滑动连接,所述连接杆的外侧设置有弹簧;
4、所述安置架内固定安装有电机,所述电机的输出端上固定连接有正反螺纹丝杆,所述正反螺纹丝杆的外侧通过螺纹连接有两个夹板,所述夹板与安置架滑动连接,所述安置架内开设有卡孔,所述夹板上固定连接有安装块,所述安装块与安置架滑动连接,所述安装块内滑动连接有顶板,所述顶板与夹板滑动连接,所述顶板上固定连接有卡球,所述卡球与卡孔滑动连接,所述安装块内固定连接有端块,所述端块与顶板滑动连接。
5、为了可对电磁铁、连接杆等结构的安装使用,作为本实用新型的一种具有风机塔筒攀爬功能的机器人优选的,所述安装筒设置有四个,四个所述安装筒在机体上均匀分布。
6、为了可对连接杆进行连接使用,作为本实用新型的一种具有风机塔筒攀爬功能的机器人优选的,所述弹簧的一端与固定环焊接,所述弹簧的另一端与连接杆焊接。
7、为了可使得连接杆处于安置稳定,作为本实用新型的一种具有风机塔筒攀爬功能的机器人优选的,所述连接杆上固定连接有磁块,所述磁块与电磁铁磁性连接。
8、为了配合卡球进行卡接使用,作为本实用新型的一种具有风机塔筒攀爬功能的机器人优选的,所述卡孔设置有多个,多个所述卡孔在安置架上均匀分布。
9、为了可对顶板进行连接使用,作为本实用新型的一种具有风机塔筒攀爬功能的机器人优选的,所述顶板上粘接有弹性气囊,所述弹性气囊的另一端与端块粘接。
10、为了可对工件进行夹紧固定,作为本实用新型的一种具有风机塔筒攀爬功能的机器人优选的,所述夹板的整体呈矩形,所述夹板为不锈钢材质。
11、与现有技术相比,本实用新型的有益效果如下:
12、1、本实用新型通过在机体上设置安装筒,在安装筒上设置电磁铁,在电磁铁上设置连接杆,在连接杆上设置强磁吸盘器,在连接杆上设置固定环,在固定环上焊接弹簧,通过电磁铁、弹簧、连接杆等结构的设置,可控制强磁吸盘器进行移动,进而对强磁吸盘器的位置进行调整,便于机器人的攀爬使用。
13、2、本实用新型通过在机体上设置安置架,在安置架上设置电机,在电机的输出端上设置正反螺纹丝杆,在正反螺纹丝杆上设置夹板,在安置架内开设卡孔,在夹板上设置安装块,在安装块上设置顶板,在顶板上设置卡球,在顶板上粘接弹性气囊,通过电机、正反螺纹丝杆等结构的设置,可推动两个夹板相向移动,进而对携带的工件进行夹紧固定,便于机器人的运输使用,在卡孔、卡球等结构的作用下,可对夹板进行精准控制。
技术特征:
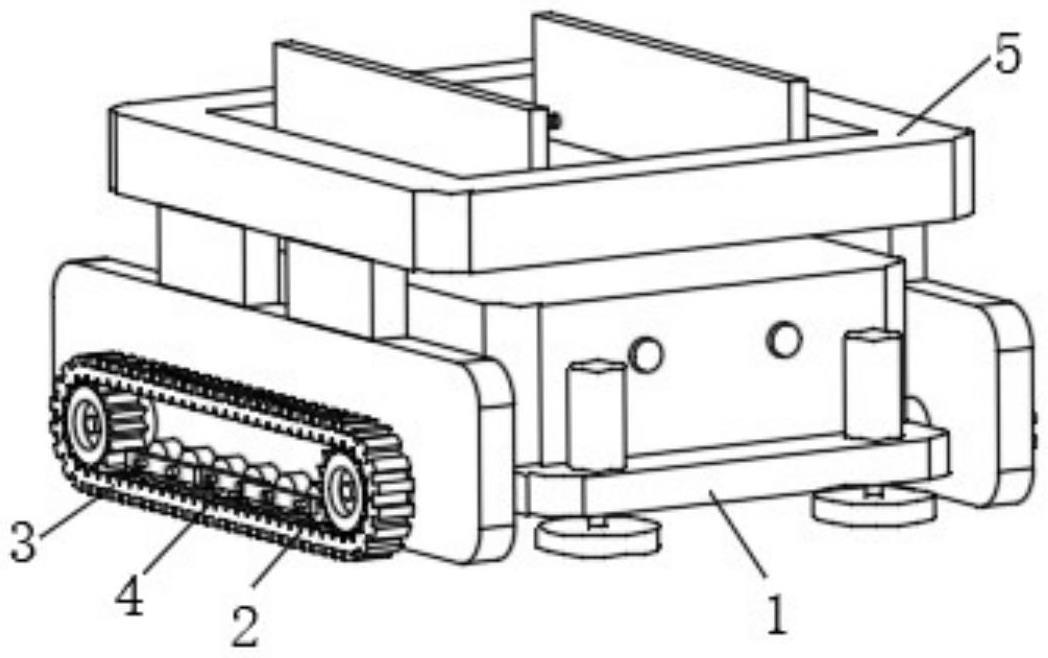
1.一种具有风机塔筒攀爬功能的机器人,包括机体(1),其特征在于:所述机体(1)上设置有驱动轮(2),所述驱动轮(2)上设置有磁性履带(3),所述机体(1)上设置有压紧轮(4),所述压紧轮(4)与磁性履带(3)接触,所述机体(1)的上端固定连接有安置架(5),所述机体(1)上固定连接有安装筒(6);
2.根据权利要求1所述的一种具有风机塔筒攀爬功能的机器人,其特征在于:所述安装筒(6)设置有四个,四个所述安装筒(6)在机体(1)上均匀分布。
3.根据权利要求1所述的一种具有风机塔筒攀爬功能的机器人,其特征在于:所述弹簧(11)的一端与固定环(10)焊接,所述弹簧(11)的另一端与连接杆(8)焊接。
4.根据权利要求1所述的一种具有风机塔筒攀爬功能的机器人,其特征在于:所述连接杆(8)上固定连接有磁块(12),所述磁块(12)与电磁铁(7)磁性连接。
5.根据权利要求1所述的一种具有风机塔筒攀爬功能的机器人,其特征在于:所述卡孔(16)设置有多个,多个所述卡孔(16)在安置架(5)上均匀分布。
6.根据权利要求1所述的一种具有风机塔筒攀爬功能的机器人,其特征在于:所述顶板(18)上粘接有弹性气囊(21),所述弹性气囊(21)的另一端与端块(20)粘接。
7.根据权利要求1所述的一种具有风机塔筒攀爬功能的机器人,其特征在于:所述夹板(15)的整体呈矩形,所述夹板(15)为不锈钢材质。
技术总结
本技术公开了一种具有风机塔筒攀爬功能的机器人,包括机体,所述机体上设置有驱动轮,所述驱动轮上设置有磁性履带,所述机体上设置有压紧轮,所述压紧轮与磁性履带接触,所述机体的上端固定连接有安置架,所述机体上固定连接有安装筒。本技术通过在机体上设置安装筒,在安装筒上设置电磁铁,在电磁铁上设置连接杆,在连接杆上设置强磁吸盘器,在连接杆上设置固定环,在固定环上焊接弹簧,通过电磁铁、弹簧、连接杆等结构的设置,可控制强磁吸盘器进行移动,进而对强磁吸盘器的位置进行调整,便于机器人的攀爬使用。
技术研发人员:丁群,曹世鹏,祁伟,张刚伟
受保护的技术使用者:众芯汉创(北京)科技有限公司
技术研发日:20230331
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!