一种风机塔筒连接部巡检机器人的制作方法
本技术涉及风机塔筒连接部巡检,尤其是涉及一种风机塔筒连接部巡检机器人。
背景技术:
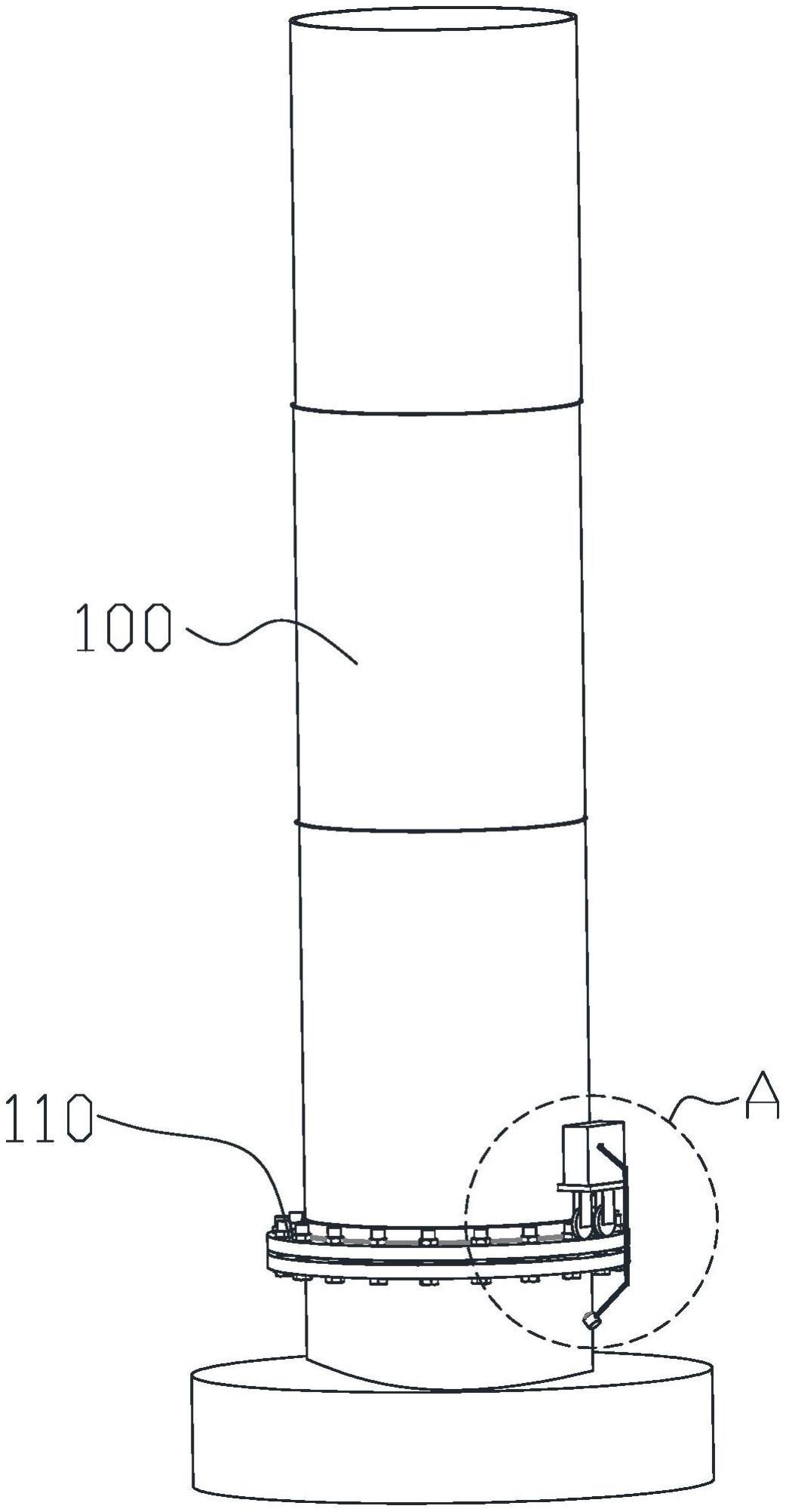
1、风机塔架由若干节塔筒相互联结而成,塔筒与地基通过预应力锚栓联结,塔筒与塔筒之间通过预应力螺栓联结(如申请号为cn202021165244.2的中国实用新型专利)。风场需定期对锚(螺)栓预紧力、混凝土基础裂缝以及法兰根部的裂缝情况进行巡检和排查。
2、一般的风机塔架的锚(螺)栓数量超过500根,多的近千根,靠人力几乎无法实现全检,因此目前大都用抽检的方式,但即便抽检20%仍然有相当大的工作量。同时混凝土基础裂缝和法兰根部裂缝的排查只能靠人的肉眼,客观性、全面性、准确性无法得到保障。
技术实现思路
1、有鉴于此,有必要提供一种风机塔筒连接部巡检机器人,用以解决现有的风机塔架的锚(螺)栓检测效率低、准确性无法得到保障的技术问题。
2、为了实现上述目的,本实用新型提供了一种风机塔筒连接部巡检机器人,包括机箱、底轮、磁性侧轮、驱动机构、第一镜头、连杆机构、第二镜头以及超声激励探头;
3、所述机箱内设置有用于与所述超声激励探头配合的激励激发装置及激励反馈记录装置;
4、所述底轮安装于所述机箱的底部,所述底轮用于行走于风机塔筒的连接法兰上;
5、所述磁性侧轮具备弱磁性,所述磁性侧轮安装于所述机箱的侧壁上,其用于吸附于所述风机塔筒的侧壁上;
6、所述驱动机构用于驱动所述磁性侧轮在所述风机塔筒的侧壁上滚动;
7、所述第一镜头安装于所述机箱的底部、并用于拍摄所述连接法兰的上表面影像;
8、所述第二镜头经由所述连杆机构与所述机箱相连,所述第二镜头用于拍摄所述连接法兰下表面影像;
9、所述超声激励探头安装于所述机箱的底部、并用于检测所述连接法兰上的螺栓的预紧力大小。
10、在一些实施例中,所述底轮包括底轮体及底轮托架,所述底轮体与所述底轮托架转动连接;所述风机塔筒连接部巡检机器人还包括第一调节气缸,所述第一调节气缸的缸体固定于所述机箱上,所述第一调节气缸的输出轴与所述底轮托架固定连接。
11、在一些实施例中,所述机箱上开设有第一容纳槽,所述第一调节气缸的缸体设置于所述第一容纳槽内。
12、在一些实施例中,所述磁性侧轮包括侧轮体及侧轮托架,所述侧轮体与所述侧轮托架转动连接;所述风机塔筒连接部巡检机器人还包括第二调节气缸,所述第二调节气缸的缸体固定于所述机箱上,所述第二调节气缸的输出轴与所述侧轮托架固定连接。
13、在一些实施例中,所述机箱上开设有第二容纳槽,所述第二调节气缸的缸体设置于所述第二容纳槽内。
14、在一些实施例中,所述驱动机构为驱动电机,所述驱动电机安装于所述机箱内,所述驱动电机的输出轴与所述侧轮体传动连接。
15、在一些实施例中,所述连杆机构包括第一连杆、第二连杆及第三连杆,所述第一连杆的一端与所述机箱铰接,所述第一连杆的另一端与所述第二连杆的一端铰接,所述第二连杆的另一端与所述第三连杆的一端铰接,所述第三连杆的另一端与所述第二镜头铰接。
16、在一些实施例中,所述机箱上固定有铰接头,所述铰接头与所述第一连杆的一端铰接。
17、在一些实施例中,所述底轮的数量为两个。
18、在一些实施例中,所述磁性侧轮的数量为两个。
19、与现有技术相比,本实用新型提出的技术方案的有益效果是:在使用时,将机箱放置在连接法兰上,使底轮与连接法兰的上表面接触,使磁性侧轮与风机塔筒的侧壁接触并吸附于风机塔筒的侧壁上,通过驱动机构驱动磁性侧轮在风机塔筒的侧壁上滚动,底轮也随之在连接法兰上移动,装置每步进一次的长度正好为相邻两个螺栓之间的距离,装置每步进一次,第一镜头和第二镜头进行一次拍摄,超声激励探头伸出激发激励一次并将激励反馈存储,第一镜头拍摄连接法兰的上表面影像,在塔筒底部巡检时,第二镜头拍摄混凝土表面影像,在巡检塔筒与塔筒联结部位时,第二镜头拍摄连接法兰下表面影像,巡检一周后,再人工将装置放入另一个连接法兰上进行检测,巡检完成后,对存储的影像图片进行图像识别,获知裂缝信息;对存储的激励反馈信息进行分析获知螺栓预紧力情况。通过本装置可大大提高风机塔架锚(螺)栓检测效率及准确性。
技术特征:
1.一种风机塔筒连接部巡检机器人,其特征在于,包括机箱、底轮、磁性侧轮、驱动机构、第一镜头、连杆机构、第二镜头以及超声激励探头;
2.根据权利要求1所述的风机塔筒连接部巡检机器人,其特征在于,所述底轮包括底轮体及底轮托架,所述底轮体与所述底轮托架转动连接;
3.根据权利要求2所述的风机塔筒连接部巡检机器人,其特征在于,所述机箱上开设有第一容纳槽,所述第一调节气缸的缸体设置于所述第一容纳槽内。
4.根据权利要求1所述的风机塔筒连接部巡检机器人,其特征在于,所述磁性侧轮包括侧轮体及侧轮托架,所述侧轮体与所述侧轮托架转动连接;
5.根据权利要求4所述的风机塔筒连接部巡检机器人,其特征在于,所述机箱上开设有第二容纳槽,所述第二调节气缸的缸体设置于所述第二容纳槽内。
6.根据权利要求4所述的风机塔筒连接部巡检机器人,其特征在于,所述驱动机构为驱动电机,所述驱动电机安装于所述机箱内,所述驱动电机的输出轴与所述侧轮体传动连接。
7.根据权利要求1所述的风机塔筒连接部巡检机器人,其特征在于,所述连杆机构包括第一连杆、第二连杆及第三连杆,所述第一连杆的一端与所述机箱铰接,所述第一连杆的另一端与所述第二连杆的一端铰接,所述第二连杆的另一端与所述第三连杆的一端铰接,所述第三连杆的另一端与所述第二镜头铰接。
8.根据权利要求7所述的风机塔筒连接部巡检机器人,其特征在于,所述机箱上固定有铰接头,所述铰接头与所述第一连杆的一端铰接。
9.根据权利要求1所述的风机塔筒连接部巡检机器人,其特征在于,所述底轮的数量为两个。
10.根据权利要求1所述的风机塔筒连接部巡检机器人,其特征在于,所述磁性侧轮的数量为两个。
技术总结
本技术公开了一种风机塔筒连接部巡检机器人,包括机箱、底轮、磁性侧轮、驱动机构、第一镜头、连杆机构、第二镜头以及超声激励探头;所述磁性侧轮具备弱磁性,所述磁性侧轮安装于所述机箱的侧壁上,其用于吸附于所述风机塔筒的侧壁上;所述第一镜头安装于所述机箱的底部、并用于拍摄所述连接法兰的上表面影像;所述第二镜头经由所述连杆机构与所述机箱相连,所述第二镜头用于拍摄所述连接法兰下表面影像;所述超声激励探头安装于所述机箱的底部、并用于检测所述连接法兰上的螺栓的预紧力大小。本技术提出的技术方案的有益效果是:通过本装置可大大提高风机塔架锚(螺)栓检测效率及准确性。
技术研发人员:韩奇,李翔,邹磊,卓朝阳,范首刚,覃晨新,彭成,叶子
受保护的技术使用者:华电新能源集团股份有限公司湖南分公司
技术研发日:20230429
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!