一种水轮机组制动风闸系统风闸位置检测及判断方法与流程
本发明涉及水力发电机制动风闸检测,具体而言,涉及一种水轮机组制动风闸系统风闸位置检测及判断方法。
背景技术:
1、制动风闸作为水轮发电机组制动方式之一,在机组正常停机、事故停机和蠕动过程中需投入制动风闸,如果无法准确获取制动风闸状态,容易严重影响机组设备安全稳定运行,因此对于制动风闸的状态检测显得尤为重要。就目前而言,制动风闸状态的检测多采用接触式行程开关,由于其内部含有弹簧机构,工作时间久了容易老化,造成制动风闸位置判断不准,且检修维护繁琐;还有采用电感式测距传感器进行风闸位置判断,但由于机组运行过程中风洞内存在多种干扰,易出现电感式测距传感器短暂失效的问题。基于此,针对上述问题,我们设计了一种水轮机组制动风闸系统风闸位置检测及判断方法。
技术实现思路
1、本发明的目的在于提供一种水轮机组制动风闸系统风闸位置检测及判断方法,其通过检测机构在制动风闸的挡板处设置,一方面能够通过红外线对射传感器及时判断制动风闸当前状态,另一方面根据制动风闸的历史数据构建预测模型,对制动风闸的挡板状态进行预测,不仅有助于提高水轮机组的安全性,减少潜在风险,而且能够根据预测结果提前采取措施,提高了水电机组的运行安全性。
2、本发明的实施例通过以下技术方案实现:
3、一种水轮机组制动风闸系统风闸位置检测及判断方法,该方法的步骤包括:
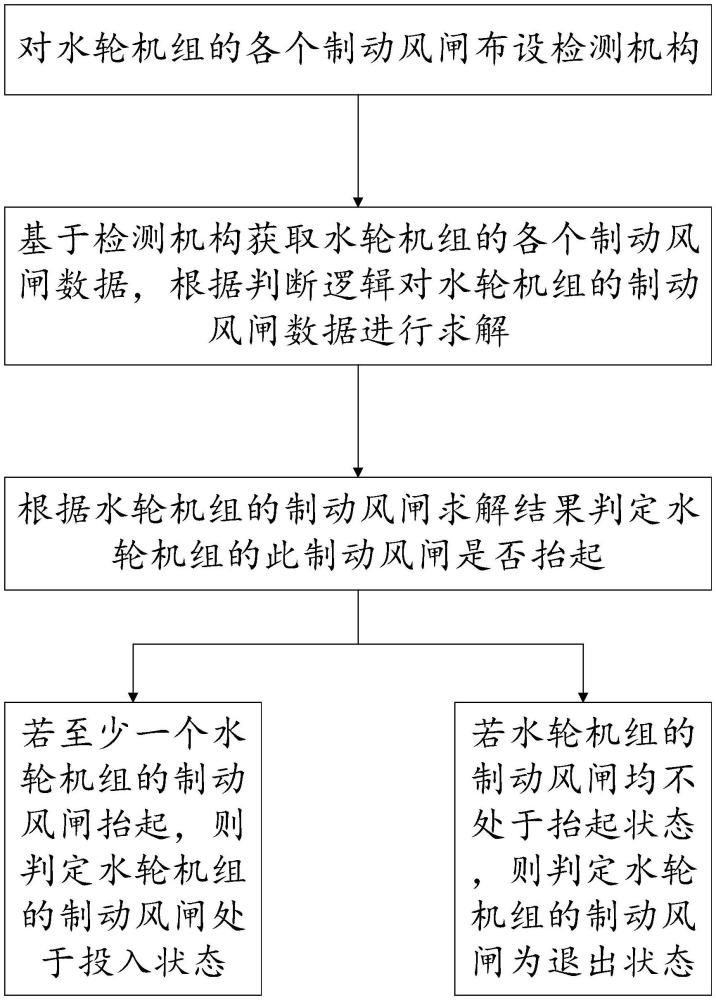
4、对水轮机组的各个制动风闸布设检测机构;
5、基于检测机构获取水轮机组的各个制动风闸数据,根据判断逻辑对水轮机组的制动风闸数据进行求解;
6、根据水轮机组的制动风闸求解结果判定水轮机组的此制动风闸是否抬起,若至少一个水轮机组的制动风闸抬起,则判定水轮机组的制动风闸处于投入状态,若水轮机组的制动风闸均不处于抬起状态,则判定水轮机组的制动风闸为退出状态。
7、可选的,所述检测机构包括:红外线对射传感器发射端、红外线对射传感器接收端、挡板;所述红外线对射传感器发射端固定安装在制动风闸缸体的底座顶部一侧,所述红外线对射传感器接收端固定安装在制动风闸缸体的底座顶部另一侧,所述红外线对射传感器发射端、红外线对射传感器接收端相对设置,所述制动风闸缸体的顶部固定设置有制动托板,所述制动托板的底部中央设置有所述挡板。
8、可选的,所述红外线对射传感器发射端具体通过安装支架一可拆卸安装在制动风闸缸体的底座顶部一侧,所述红外线对射传感器接收端具体通过安装支架二可拆卸安装在制动风闸缸体的底座顶部另一侧。
9、可选的,还包括plc控制器,所述红外线对射传感器发射端、红外线对射传感器接收端分别与所述plc控制器连接。
10、可选的,所述基于检测机构获取水轮机组的各个制动风闸数据,根据判断逻辑对水轮机组的制动风闸数据进行求解,其具体依靠plc控制器内预设的水轮机组制动风闸状态预测模型进行求解,所述水轮机组制动风闸状态预测模型构建过程为:
11、获取水轮机组的制动风闸历史数据;
12、对水轮机组的制动风闸历史数据进行数据预处理,构建水轮机组制动风闸状态预测模型,将水轮机组的制动风闸历史数据划分为训练数据及测试数据,通过水轮机组制动风闸状态预测模型对训练数据进行计算,获取水轮机组制动风闸状态的预测结果,基于损失函数计算测试数据与水轮机组制动风闸状态的预测结果之间的损失值,基于损失值反向迭代水轮机组制动风闸状态预测模型的参数,直至完成水轮机组制动风闸状态预测模型的训练;
13、将训练完成的水轮机组制动风闸状态预测模型布设至plc控制器内。
14、可选的,所述水轮机组的制动风闸历史数据包括:挡板位置、速度、温度及压力数据,以及各个数据点所对应的挡板状态。
15、可选的,所述基于损失函数计算测试数据与水轮机组制动风闸状态的预测结果之间的损失值,所述损失函数的计算公式如下:
16、
17、其中,m是样本数量,y(i)是样本i的实际标签,hθ(x(i))是水轮机组制动风闸状态预测模型对样本i的预测概率,θ是水轮机组制动风闸状态预测模型的参数。
18、本发明实施例的技术方案至少具有如下优点和有益效果:
19、本发明实施例通过检测机构在制动风闸的挡板处设置,一方面能够通过红外线对射传感器及时判断制动风闸当前状态,另一方面根据制动风闸的历史数据构建预测模型,对制动风闸的挡板状态进行预测,不仅有助于提高水轮机组的安全性,减少潜在风险,而且能够根据预测结果提前采取措施,提高了水电机组的运行安全性。
技术特征:
1.一种水轮机组制动风闸系统风闸位置检测及判断方法,其特征在于,该方法的步骤包括:
2.根据权利要求1所述的水轮机组制动风闸系统风闸位置检测及判断方法,其特征在于,所述检测机构包括:红外线对射传感器发射端(1)、红外线对射传感器接收端(2)、挡板(5);所述红外线对射传感器发射端(1)固定安装在制动风闸缸体(7)的底座(8)顶部一侧,所述红外线对射传感器接收端(2)固定安装在制动风闸缸体(7)的底座(8)顶部另一侧,所述红外线对射传感器发射端(1)、红外线对射传感器接收端(2)相对设置,所述制动风闸缸体(7)的顶部固定设置有制动托板(9),所述制动托板(9)的底部中央设置有所述挡板(5)。
3.根据权利要求2所述的水轮机组制动风闸系统风闸位置检测及判断方法,其特征在于,所述红外线对射传感器发射端(1)具体通过安装支架一(3)可拆卸安装在制动风闸缸体(7)的底座(8)顶部一侧,所述红外线对射传感器接收端(2)具体通过安装支架二(4)可拆卸安装在制动风闸缸体(7)的底座(8)顶部另一侧。
4.根据权利要求2所述的水轮机组制动风闸系统风闸位置检测及判断方法,其特征在于,还包括plc控制器,所述红外线对射传感器发射端(1)、红外线对射传感器接收端(2)分别与所述plc控制器连接。
5.根据权利要求4所述的水轮机组制动风闸系统风闸位置检测及判断方法,其特征在于,所述基于检测机构获取水轮机组的各个制动风闸数据,根据判断逻辑对水轮机组的制动风闸数据进行求解,其具体依靠plc控制器内预设的水轮机组制动风闸状态预测模型进行求解,所述水轮机组制动风闸状态预测模型构建过程为:
6.根据权利要求5所述的水轮机组制动风闸系统风闸位置检测及判断方法,其特征在于,所述水轮机组的制动风闸历史数据包括:挡板位置、速度、温度及压力数据,以及各个数据点所对应的挡板状态。
7.根据权利要求5所述的水轮机组制动风闸系统风闸位置检测及判断方法,其特征在于,所述基于损失函数计算测试数据与水轮机组制动风闸状态的预测结果之间的损失值,所述损失函数的计算公式如下:
技术总结
本发明涉及水力发电机制动风闸检测技术领域,具体而言,涉及一种水轮机组制动风闸系统风闸位置检测及判断方法,该方法的步骤包括:对水轮机组的各个制动风闸布设检测机构;基于检测机构获取水轮机组的各个制动风闸数据,根据判断逻辑对水轮机组的制动风闸数据进行求解;根据水轮机组的制动风闸求解结果判定水轮机组的此制动风闸是否抬起,若至少一个水轮机组的制动风闸抬起,则判定水轮机组的制动风闸处于投入状态,若水轮机组的制动风闸均不处于抬起状态,则判定水轮机组的制动风闸为退出状态。
技术研发人员:蹇万祥,曹艳明,李辉,刘细辉,石金继,周浩杰,李有春,孟小霞,王义鑫,陈泽,蔚嘉伟
受保护的技术使用者:雅砻江流域水电开发有限公司
技术研发日:
技术公布日:2024/8/20
- 还没有人留言评论。精彩留言会获得点赞!