基于滑膜观测器的变推力液体火箭发动机控制方法及系统
本申请涉及发动机,特别是涉及一种基于滑膜观测器的变推力液体火箭发动机控制方法及系统。
背景技术:
1、变推力液体火箭发动机通过实时调节液路输送系统中的阀门开度,动态控制调节液体氧化剂和液体燃料的比例,影响化学反应过程,能够为航天器提供可连续调节的推力,为航天器的飞行及姿态控制等提供更为灵活的推力,与传统固定推力火箭发动机或固液火箭发动机相比,其系统结构更加简单,具有独特的性能优势。然而,要实现对其液体燃料和液体氧化剂流量的精确控制,主要存在以下关键问题:1)液体流动不稳定导致状态测量时,存在噪声,影响实际控制的精度;2)液体流经文氏管流入燃烧室会产生压降,导致燃烧极不稳定,从而造成推力大范围波动,影响实际控制效果。
2、然而,现有一些方法采用开环控制方法,对文氏管的流量进行调节,无法有效保证发动机推力的稳定性。另一方面,传统闭环控制方法,考虑的是系统的总体反馈误差,无法针对液体状态变量本身的噪声和压降特性,对液体火箭发动机的推力进行有效的连续控制。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够兼顾液体火箭发动机噪声和压降特性的鲁棒控制的基于滑膜观测器的变推力液体火箭发动机控制方法及系统。
2、一种基于滑膜观测器的变推力液体火箭发动机控制方法,所述方法包括:
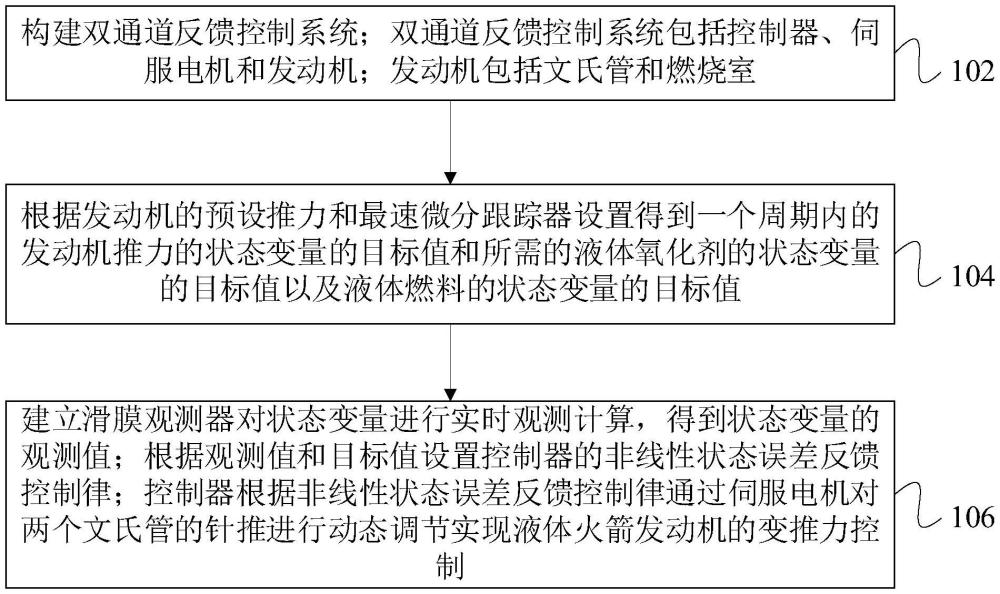
3、构建双通道反馈控制系统;双通道反馈控制系统包括控制器、伺服电机和发动机;发动机包括文氏管和燃烧室;
4、根据发动机的预设推力和最速微分跟踪器设置得到一个周期内的发动机推力的状态变量的目标值和所需的液体氧化剂的状态变量的目标值以及液体燃料的状态变量的目标值;
5、建立滑膜观测器对状态变量进行实时观测计算,得到状态变量的观测值;根据观测值和目标值设置控制器的非线性状态误差反馈控制律;控制器根据非线性状态误差反馈控制律通过伺服电机对两个文氏管的针推进行动态调节实现液体火箭发动机的变推力控制。
6、在其中一个实施例中,根据发动机的预设推力和最速微分跟踪器设置得到一个周期内的发动机推力的状态变量的目标值、液体氧化剂的状态变量的目标值以及液体燃料的状态变量的目标值,包括:
7、根据发动机的预设推力和最速微分跟踪器设置得到一个周期内的发动机推力的状态变量的目标值、液体氧化剂的状态变量的目标值以及液体燃料的状态变量的目标值分别为
8、
9、其中,v1、v2和v3分别表示液体氧化剂、液体燃料、发动机推力的状态变量的目标值,fhan(v3-t,v2,r0,h)为快速最优控制综合函数,t表示预设推力,t为采样周期,r0表示速度因子,h为过滤因子,m表示液体氧化剂和液体燃料的消耗比。
10、在其中一个实施例中,建立滑膜观测器对状态变量进行实时观测计算,得到状态变量的观测值,包括:
11、建立滑膜观测器对状态变量进行实时观测计算,得到状态变量的观测值为
12、
13、其中,e1=v1-z1表示液体氧化剂的状态反馈误差,e2=v2-z2表示液体燃料的状态反馈误差,e3=v3-z3表示发动机推力的状态反馈误差,v1、v2和v3分别表示液体氧化剂、液体燃料、发动机推力的状态变量,z表示观测值,表示观测值的一阶导数,γ1,γ2和γ3分别为滑膜鲁棒项的系数。
14、在其中一个实施例中,根据观测值和目标值设置非线性状态误差反馈控制律,包括:
15、根据观测值和目标值设置非线性状态误差反馈控制律为
16、
17、其中,e1=v1-z1表示液体氧化剂的状态反馈误差,e2=v2-z2表示液体燃料的状态反馈误差,e3=v3-z3表示发动机推力的状态反馈误差,α表示调节系数,δ表示状态阈值,β表示状态误差反馈控制律的增益,u1,u2表示液体氧化剂和液体燃料两路文氏管针锥的控制律,fal()表示非线性函数。
18、在其中一个实施例中,非线性函数的表达式为
19、
20、一种基于滑膜观测器的变推力液体火箭发动机控制系统,所述系统包括最速微分跟踪器、控制器、滑膜观测器和发动机;发动机包括文氏管和燃烧室;
21、最速微分跟踪器用于根据发动机的预设推力设置得到一个周期内的发动机推力的状态变量的目标值和所需的液体氧化剂的状态变量的目标值以及液体燃料的状态变量的目标值;
22、滑膜观测器用于对状态变量进行实时观测计算,得到状态变量的观测值;根据观测值和目标值设置控制器的非线性状态误差反馈控制律;
23、控制器用于根据非线性状态误差反馈控制律通过伺服电机对两个文氏管的针推进行动态调节;
24、文氏管通过调节喉部面积控制液体氧化物的流量和液体燃料的流量实现发动机的变推力控制。
25、上述基于滑膜观测器的变推力液体火箭发动机控制方法及系统,本申请设计了双通道反馈控制系统,构建了两个文氏管的反馈回路,通过控制文氏管针锥的移动,调节文氏管的喉部面积,实现对两个通道液体氧化剂和液体燃料流量的动态调节。并针对文氏管压降等因素导致推力不稳的问题,将发动机推力作为观测状态引入反馈回路,提高对发动机推力的控制精度,然后根据发动机的预设推力和最速微分跟踪器设置得到一个周期内的发动机推力的状态变量的目标值和所需的液体氧化剂的状态变量的目标值以及液体燃料的状态变量的目标值,建立滑膜观测器对状态变量进行实时观测计算,得到状态变量的观测值;根据观测值和目标值设置控制器的非线性状态误差反馈控制律;控制器根据非线性状态误差反馈控制律通过伺服电机对两个文氏管的针推进行动态实现液体火箭发动机的变推力控制,能有效实现液体火箭发动机变推力的连续有效控制。
技术特征:
1.一种基于滑膜观测器的变推力液体火箭发动机鲁棒控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,根据发动机的预设推力和最速微分跟踪器设置得到一个周期内的发动机推力的状态变量的目标值、液体氧化剂的状态变量的目标值以及液体燃料的状态变量的目标值,包括:
3.根据权利要求1所述的方法,其特征在于,建立滑膜观测器对状态变量进行实时观测计算,得到状态变量的观测值,包括:
4.根据权利要求1所述的方法,其特征在于,根据所述观测值和目标值设置非线性状态误差反馈控制律,包括:
5.根据权利要求4所述的方法,其特征在于,所述非线性函数的表达式为
6.一种基于滑膜观测器的变推力液体火箭发动机控制系统,其特征在于,所述系统包括最速微分跟踪器、控制器、滑膜观测器和发动机;所述发动机包括文氏管和燃烧室;
技术总结
本申请涉及一种基于滑膜观测器的变推力液体火箭发动机控制方法及系统。所述方法包括:构建双通道反馈控制系统,包括控制器、伺服电机和发动机;所述发动机包括文氏管和燃烧室;根据发动机的预设推力和最速微分跟踪器设置得到一个周期内的发动机推力的状态变量的目标值和所需的液体氧化剂的状态变量的目标值以及液体燃料的状态变量的目标值;建立滑膜观测器对状态变量进行实时观测计算,得到观测值;根据观测值和目标值设置非线性状态误差反馈控制律;控制器根据非线性状态误差反馈控制律通过伺服电机对两个文氏管的针推进行动态调节实现液体火箭发动机的变推力控制。采用本方法能够兼顾液体火箭发动机噪声和压降特性的鲁棒控制。
技术研发人员:徐博文,杨伟奇,吴先宇,赵伟,周芸帆,孙蒙
受保护的技术使用者:中国人民解放军国防科技大学
技术研发日:
技术公布日:2024/8/20
- 还没有人留言评论。精彩留言会获得点赞!