本发明涉及风电,特别是一种智能模糊变频偏航控制系统及控制方法。
背景技术:
1、目前风机偏航对风系统中,最常用的莫过于采用弱电控制接触器直接吸合的方式控制偏航电机偏航对风,针对风机偏航对风速度较慢的问题,某些类型风机采用变频变速偏航控制方式来提高风机偏航对风速度,此种方式虽然会提高风机偏航对风效率,但是会导致风机的启动与停止时速度变化率较大,会造成机舱内设备以及叶片振动,严重的会影响设备以及机组的运行,因此本专利以提高偏航电机偏航对风效率的同时实现“软起动”与“软着陆”功能为目标设计一种智能变频控制技术,本专利引入智能模糊控制逻辑,实现智能化控制,此方式可以使得频率变化随着偏航对风角度差以及偏航角速度的变化而变化,从而得到相应适合频率,实现智能偏航对风效果。
技术实现思路
1、本发明所要解决的技术问题是提供一种智能模糊变频偏航控制系统及控制方法,提高了机组偏航对风效率,解决了因偏航控制算法缺陷导致的偏航系统故障频发。
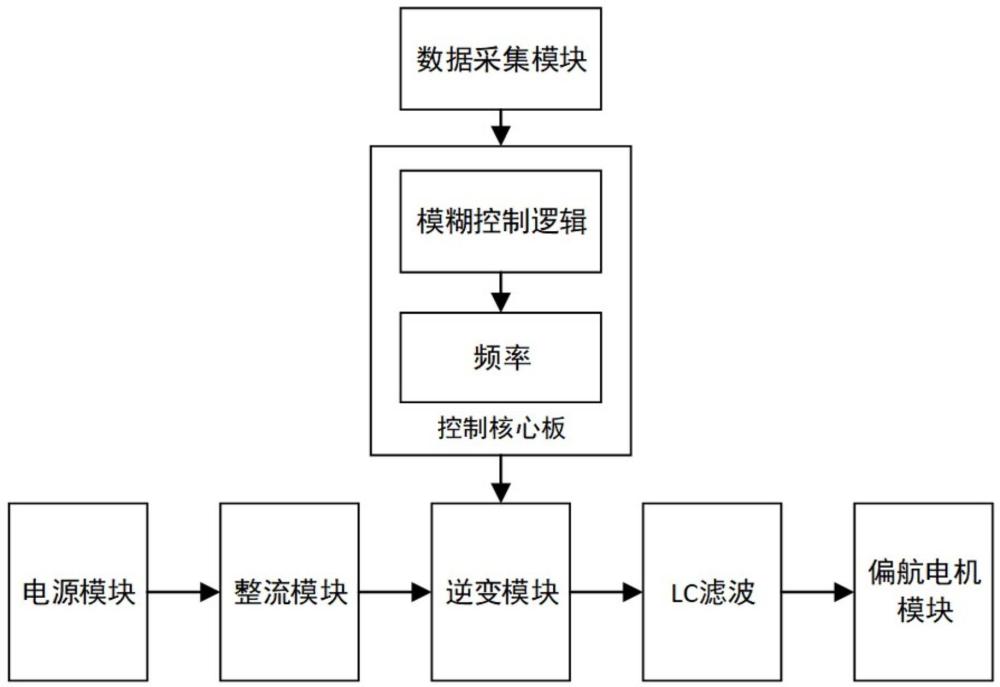
2、为解决上述技术问题,本发明所采用的技术方案是:一种智能模糊变频偏航控制系统,包括依次电连接的电源模块、整流模块、逆变模块、lc滤波模块及偏航电机模块,还包括控制核心板及数据采集模块,数据采集模块与控制核心板电连接,控制核心板与逆变模块电连接;
3、数据采集模块,采用电流互感器和电压互感器采集电流和电压值,采集数据是为了实现clark和park变换;(三相坐标系到两相旋转坐标系的转换),其目的是为了提高电机的控制效果,使得三相电机具有近似直流电机的控制效果
4、控制核心板,控制芯片采用的是dsp28335电机专用控制芯片,进行3/2变换,然后烧录到控制芯片中,并且其载波与调制波也是通过控制核心板完成,其输出pwm波输入到功率模块,进而控制电机;
5、电源模块,用于提供三相交流电源,通过整流模块变成直流电,交流变直流的目的是为了实现控制算法的输入,在逆变模块介入控制逻辑算法,输出离散化三相正弦波,lc滤波模块用于实现离散化正弦波到连续正弦波的整定,偏航电机模块为控制对象;
6、整流模块,对采集后的三相电压电流进行整流,其目的是为了在逆变模块加入控制逻辑,实现更好的控制效果。
7、逆变模块,将直流电逆变成交流电,将控制核心板生成的pwm波通过你变模块实现电机的控制;
8、lc滤波模块,将逆变产生的等效三相正弦波转化成正弦波形;提高正弦波质量。
9、优选的,所述控制核心板采用dsp28355控制芯片。
10、一种智能模糊变频偏航控制方法,包括以下步骤:
11、s1、采集电机输入的三相电压,通过3/2等效变换将三相静止坐标系转换成两相旋转坐标系,以达到接近直流电机的控制性能;
12、s2、将采集到的三相线电压等效变换得到ud和uq,通过pi锁相环使得uq进行锁相,pi控制采用增量式pi控制方式输出得到w,与t相乘得到角度θ,锁相使得uq=0,pi控制:piout=kp(err-erro)+ki×err,err=df-fb;
13、s3、将开关频率采用10khz,同时以开关频率作为采样频率;
14、s4、通过锁相环锁定uq=0,得到ud=um,作为正弦调制波幅值,正弦调制波为:u=umsin((2πf)t),通过调整调制波频率来调整输出频率与波形质量,三角波频率为开关频率设为10khz;
15、s5、通过采集偏航位移角度以及偏航角速度,将其作为二阶模糊控制逻辑的逻辑输入值,然后通过模糊逻辑分析,得到模糊输出值,以此可以实现变频变速偏航对风;
16、s6、得到的模糊输出频率作为调制波的频率通过dsp内部进一步处理,得到三相pwm波,通过功率驱动模块控制三相逆变桥进而控制电机的旋转,实现偏航电机的智能变频控制。
17、优选的,所述步骤s5将采集到的偏航角位移以及偏航角速度数据作为模糊控制两个输入基准量,其内部采用系统采用mamdani模糊算法和重心反模糊化,通过传感器采集的偏航角位移及偏航角速度,作为模糊规则的模糊输入,设立模糊规则,通过隶属度函数来得出合适的输出频率,其隶属度函数判断是依据传感器采集现有电机的角位移及角速度,从而实现了电机的智能化控制。
18、本发明提供一种智能模糊变频偏航控制系统及方法,实现了智能变频变速偏航功能,可以根据当前风向以及偏航角速度输出相应的频率值,进而控制风机偏航对风速度,此控制方式实现了输出频率值随着偏航位移角的变化以及偏航角速度变化而变化,在偏航位移角度较大时以较大的速度进行变频偏航对风,大大提高了风能利用效率,同时随着偏航位移角度的变小,那么电机的偏航速度也会相应变小,实现“软着陆”功能,同时如果在位移角度较大,同时偏航角速度为零或者较小的情况下不会以较大的转速启动,实现了“软起动”功能,此方式对于机组的振动较小,不会引起风机的振动对设备产生影响,同时能够以智能变频的方式偏航对风,提高了发电量,提高了风能利用率,提高了发电效率。
19、本方案相较于传统的偏航电机匀速偏航对风有更好的偏航对风效率,实现了智能变频偏航对风效果。提高了风能利用效率,同时提高了风机发电量。
技术特征:1.一种智能模糊变频偏航控制系统,其特征在于:包括依次电连接的电源模块、整流模块、逆变模块、lc滤波模块及偏航电机模块,还包括控制核心板及数据采集模块,数据采集模块与控制核心板电连接,控制核心板与逆变模块电连接;
2.根据权利要求1所述一种智能模糊变频偏航控制系统,其特征在于:所述控制核心板采用dsp28355控制芯片。
3.一种智能模糊变频偏航控制方法,其特征在于:包括以下步骤:
4.根据权利要求3所述一种智能模糊变频偏航控制系统,其特征在于:所述步骤s5将采集到的偏航角位移以及偏航角速度数据作为模糊控制两个输入基准量,其内部采用系统采用mamdani模糊算法和重心反模糊化,通过传感器采集的偏航角位移及偏航角速度,作为模糊规则的模糊输入,设立模糊规则,通过隶属度函数来得出合适的输出频率,其隶属度函数判断是依据传感器采集现有电机的角位移及角速度,从而实现了电机的智能化控制。
技术总结一种智能模糊变频偏航控制系统,包括依次电连接的电源模块、整流模块、逆变模块、LC滤波模块及偏航电机模块,还包括控制核心板及数据采集模块,数据采集模块与控制核心板电连接,控制核心板与逆变模块电连接;本发明提供一种智能模糊变频偏航控制系统及方法,实现了智能变频变速偏航功能,可以根据当前风向以及偏航角速度输出相应的频率值,进而控制风机偏航对风速度,此控制方式实现了输出频率值随着偏航位移角的变化以及偏航角速度变化而变化,在偏航位移角度较大时以较大的速度进行变频偏航对风,大大提高了风能利用效率,同时随着偏航位移角度的变小,那么电机的偏航速度也会相应变小,实现“软着陆”功能,同时如果在位移角度较大,同时偏航角速度为零或者较小的情况下不会以较大的转速启动,实现了“软起动”功能,此方式对于机组的振动较小,不会引起风机的振动对设备产生影响,同时能够以智能变频的方式偏航对风,提高了发电量,提高了风能利用率,提高了发电效率。
技术研发人员:禹聪,单晓晖,许红琪,王会堂,邱世琦,张效梦,李建辉,李超圆,刘辰龙
受保护的技术使用者:三峡新能源海上风电运维江苏有限公司
技术研发日:技术公布日:2024/11/7