一种风机塔筒焊缝及螺栓检测方法及系统与流程
本发明涉及缺陷检测,具体涉及一种风机塔筒焊缝及螺栓检测方法及系统。
背景技术:
1、风机塔筒是将风力发电机组高高地安装在地面以上的结构支撑体系,它能够承受风力发电机组的重量,并将风力发电机组提升到更高的高度,在保证整个风机系统的稳定性和安全性的同时使得风力发电机组更有效地捕捉到高空中的风流,从而提高发电效率。焊缝和螺栓是风机塔筒支撑结构的重要部分,若焊缝质量不佳或螺栓紧固不良可能导致风机塔筒在运行中产生松动或者变形,影响整个风机系统的稳定性和工作效率,因此,需要定期检测风机塔筒的焊缝及螺栓,以及时发现问题,确保风机塔筒长期稳定运行。
2、相关技术中,由具备专业资质的巡检人员在高空且狭小空间内作业,以进行风机塔筒焊缝及螺栓检测。由于高空中人员活动空间有限,并且检测仪器的架设比较困难,且高空作业存在安全隐患,检测难度大、成本高、操作繁琐。并且,对焊缝及螺栓缺陷的判断依赖于巡检人员的主观想法,难以保证准确性。因此,亟需一种能够自动检测风机塔筒焊缝及螺栓并自动进行缺陷识别分析的方法。
技术实现思路
1、有鉴于此,本发明的目的在于提供一种风机塔筒焊缝及螺栓检测方法及系统,以解决进行风机塔筒焊缝及螺栓检测时检测难度大、操作繁琐、准确性低的问题。
2、第一方面,本发明提供了一种风机塔筒焊缝及螺栓检测方法,所述方法由风机塔筒焊缝及螺栓检测系统的数据处理设备执行;所述风机塔筒焊缝及螺栓检测系统还包括爬壁吸附机器人;所述爬壁吸附机器人与所述数据处理设备通信连接;所述方法包括:
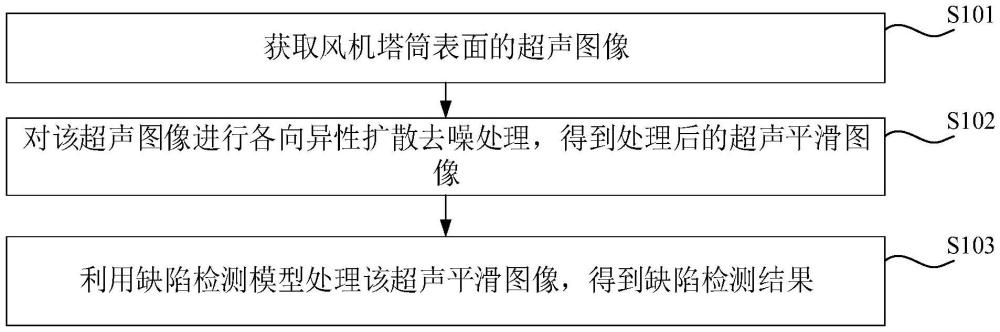
3、获取风机塔筒表面的超声图像;所述超声图像由所述爬壁吸附机器人扫描风机塔筒表面获得;
4、对所述超声图像进行各向异性扩散去噪处理,得到处理后的超声平滑图像;
5、利用缺陷检测模型处理所述超声平滑图像,得到缺陷检测结果;所述缺陷检测模型为预先通过风机塔筒表面样本图像训练过的神经网络模型。
6、在一种可选的实施方式中,所述对所述超声图像进行各向异性扩散去噪处理,包括:
7、获取各向异性扩散去噪模型;
8、将所述超声图像输入各向异性扩散去噪模型,通过所述各向异性扩散去噪模型的扩散系数、梯度算子和散度算子对超声图像进行迭代,得到处理后的超声平滑图像。
9、在一种可选的实施方式中,所述利用缺陷检测模型处理所述超声平滑图像,得到缺陷检测结果,包括:
10、基于目标步长对所述超声平滑图像进行滑动裁剪,生成所述超声平滑图像的各个子图像;
11、利用缺陷检测模型处理所述超声平滑图像的各个子图像,分别得到各个子图像对应的各个缺陷分类的概率值;其中,每个子图像对应有各个缺陷分类的概率值;所述缺陷分类包括焊缝未熔合、焊缝未焊透、焊缝裂纹、焊缝疲劳、螺栓断裂、螺栓松动、螺栓预紧力下降;
12、利用投票法取各个缺陷分类的概率值的均值,将均值最大的缺陷分类确定为缺陷检测结果。
13、第二方面,本发明提供了一种风机塔筒焊缝及螺栓检测系统,包括:
14、爬壁吸附机器人,包括行走吸附机构、驱动机构、超声检测换能器及超声信号传输机构;所述驱动机构用于控制所述行走吸附机构,使得所述爬壁吸附机器人按照目标路线吸附在风机塔筒表面移动;所述超声检测换能器用于采集风机塔筒表面的超声信号,并通过超声信号传输机构传输至所述驱动机构;所述驱动机构还包括信号发射接收装置,用于将超声信号传输至地面控制平台;
15、地面控制平台,包括数据接收模块和数据处理设备;所述数据接收模块用于接收所述信号发射接收装置传输的超声信号;所述数据处理设备包括:
16、数据获取模块,用于获取风机塔筒表面的超声图像;所述超声图像由所述超声信号处理得到;
17、去噪模块,用于对所述超声图像进行各向异性扩散去噪处理,得到处理后的超声平滑图像;
18、缺陷检测模块,用于利用缺陷检测模型处理所述超声平滑图像,得到缺陷检测结果;所述缺陷检测模型为预先通过风机塔筒表面样本图像训练过的神经网络模型。
19、在一种可选的实施方式中,所述行走吸附机构还包括两个对称的履带模块,用于在风机塔筒表面移动;所述行走吸附机构还包括永磁体吸附组件;所述永磁体吸附组件放置在爬壁吸附机器人的重心处,以为两个履带模块提供相同的驱动力矩。
20、在一种可选的实施方式中,所述驱动机构还包括控制器,所述控制器中设置有曲面运动控制算法,用于根据风电塔筒表面的倾斜角度、履带模块与风机塔筒表面之间的摩擦力和接触摩擦因数、爬壁吸附机器人的重力、转弯半径、电机和齿轮传动比以及电机和齿轮传动效率计算输出扭矩,并通过输出扭矩控制行走吸附机构。
21、在一种可选的实施方式中,所述超声检测换能器设置在爬壁吸附机器人前端且贴近风机塔筒表面,以向风机塔筒表面发射超声波,并接收风机塔筒表面反射的超声信号。
22、第三方面,本发明提供了一种计算机设备,包括:存储器和处理器,存储器和处理器之间互相通信连接,存储器中存储有计算机指令,处理器通过执行计算机指令,从而执行上述第一方面或其对应的任一实施方式的风机塔筒焊缝及螺栓检测方法。
23、第四方面,本发明提供了一种计算机可读存储介质,该计算机可读存储介质上存储有计算机指令,计算机指令用于使计算机执行上述第一方面或其对应的任一实施方式的风机塔筒焊缝及螺栓检测方法。
24、第五方面,本发明提供了一种计算机程序产品,包括计算机指令,计算机指令用于使计算机执行上述第一方面或其对应的任一实施方式的风机塔筒焊缝及螺栓检测方法。
25、本发明提供的技术方案可以包括以下有益效果:
26、本发明提供的风机塔筒焊缝及螺栓检测方法由风机塔筒焊缝及螺栓检测系统的数据处理设备执行,风机塔筒焊缝及螺栓检测系统还包括爬壁吸附机器人,通过爬壁吸附机器人扫描风机塔筒表面以获取风机塔筒表面的超声图像,再通过数据处理设备对超声图像进行各向异性扩散去噪处理,得到处理后的超声平滑图像,利用缺陷检测模型处理超声平滑图像,得到缺陷检测结果,避免了人工作业导致的检测难度大、成本高、操作繁琐以及准确性低的问题,方案灵活,进行风机塔筒焊缝及螺栓缺陷检测时准确性好、效率高。
技术特征:
1.一种风机塔筒焊缝及螺栓检测方法,其特征在于,所述方法由风机塔筒焊缝及螺栓检测系统的数据处理设备执行;所述风机塔筒焊缝及螺栓检测系统还包括爬壁吸附机器人;所述爬壁吸附机器人与所述数据处理设备通信连接;所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述对所述超声图像进行各向异性扩散去噪处理,包括:
3.根据权利要求1或2所述的方法,其特征在于,所述利用缺陷检测模型处理所述超声平滑图像,得到缺陷检测结果,包括:
4.一种风机塔筒焊缝及螺栓检测系统,其特征在于,包括:
5.根据权利要求4所述的系统,其特征在于,所述行走吸附机构还包括两个对称的履带模块,用于在风机塔筒表面移动;所述行走吸附机构还包括永磁体吸附组件;所述永磁体吸附组件放置在爬壁吸附机器人的重心处,以为两个履带模块提供相同的驱动力矩。
6.根据权利要求5所述的系统,其特征在于,所述驱动机构还包括控制器,所述控制器中设置有曲面运动控制算法,用于根据风电塔筒表面的倾斜角度、履带模块与风机塔筒表面之间的摩擦力和接触摩擦因数、爬壁吸附机器人的重力、转弯半径、电机和齿轮传动比以及电机和齿轮传动效率计算输出扭矩,并通过输出扭矩控制行走吸附机构。
7.根据权利要求4至6任一所述的系统,其特征在于,所述超声检测换能器设置在爬壁吸附机器人前端且贴近风机塔筒表面,以向风机塔筒表面发射超声波,并接收风机塔筒表面反射的超声信号。
8.一种计算机设备,其特征在于,包括:
9.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机指令,所述计算机指令用于使计算机执行权利要求1至3中任一项所述的风机塔筒焊缝及螺栓检测方法。
10.一种计算机程序产品,其特征在于,包括计算机指令,所述计算机指令用于使计算机执行权利要求1至3中任一项所述的风机塔筒焊缝及螺栓检测方法。
技术总结
本发明涉及缺陷检测技术领域,公开了一种风机塔筒焊缝及螺栓检测方法及系统。该方法由风机塔筒焊缝及螺栓检测系统的数据处理设备执行,风机塔筒焊缝及螺栓检测系统还包括爬壁吸附机器人,爬壁吸附机器人与数据处理设备通信连接;该方法包括:获取风机塔筒表面的超声图像;超声图像由爬壁吸附机器人扫描风机塔筒表面获得;对超声图像进行各向异性扩散去噪处理,得到处理后的超声平滑图像;利用缺陷检测模型处理超声平滑图像,得到缺陷检测结果;缺陷检测模型为预先通过风机塔筒表面样本图像训练过的神经网络模型。上述方案,在实现风机塔筒焊缝及螺栓检测功能时,准确性好效率高。
技术研发人员:吴海飞,苏营,孙勇,王罗,胡景朋,邱彦靓
受保护的技术使用者:中国长江三峡集团有限公司
技术研发日:
技术公布日:2024/11/28
- 还没有人留言评论。精彩留言会获得点赞!