三阶积分型的风力发电机组位置与转速估算方法和系统与流程
本发明涉及风力发电机组控制,尤其涉及一种三阶积分型的风力发电机组位置与转速估算方法和系统。
背景技术:
1、随着风力发电技术的广泛应用,风力发电机组的特殊工况对其位置和速度检测技术提出了新的挑战。特别是在风力发电机组的运行过程中,存在频率大范围变化、持续变化等情况,以及风力发电机组在特殊工况下其反电动势中出现高次谐波成分。这些特性使得现有的技术手段在风机位置和转速的精确测量方面存在显著不足。因此,亟需一种能够精确地得到风力发电机组的位置与转速信息的方案。
技术实现思路
1、本发明提供了一种三阶积分型的风力发电机组位置与转速估算方法和系统,解决了如何准确地估算风力发电机组位置与转速的技术问题。
2、本发明第一方面提供的一种三阶积分型的风力发电机组位置与转速估算方法,包括:
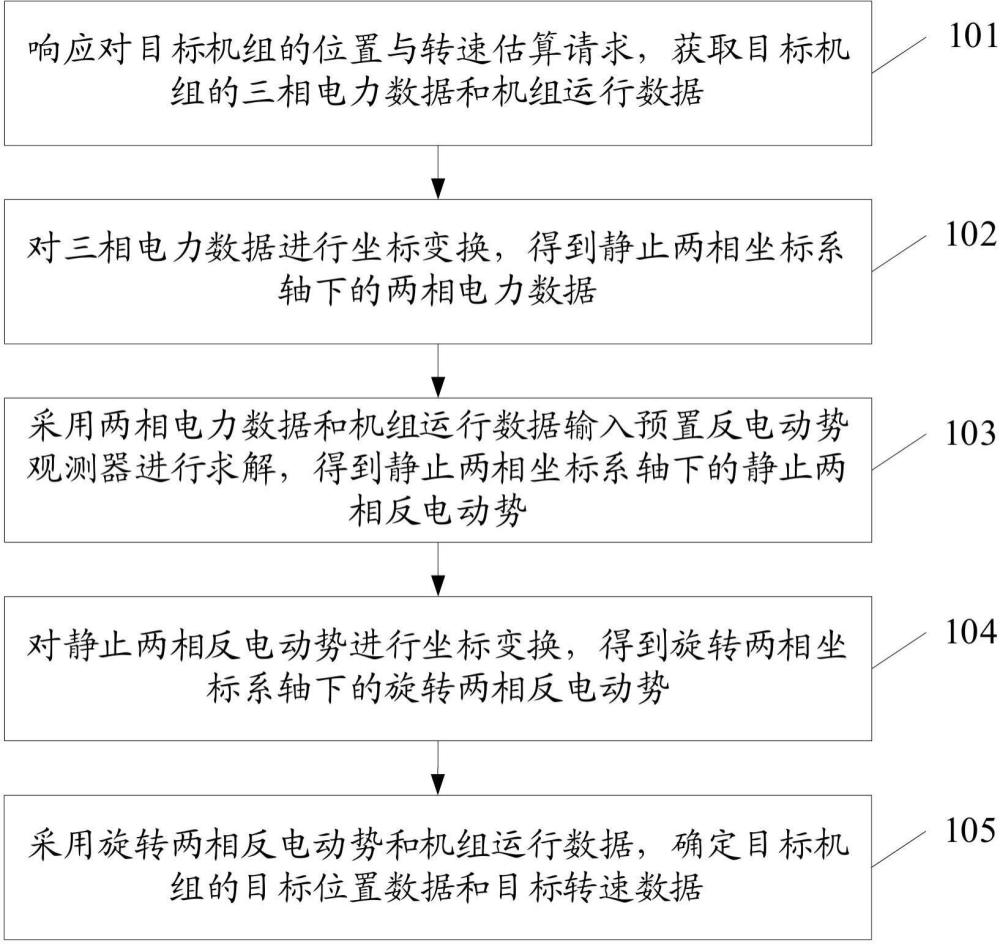
3、响应对目标机组的位置与转速估算请求,获取所述目标机组的三相电力数据和机组运行数据;
4、对所述三相电力数据进行坐标变换,得到静止两相坐标系轴下的两相电力数据;
5、采用所述两相电力数据和所述机组运行数据输入预置反电动势观测器进行求解,得到静止两相坐标系轴下的静止两相反电动势;
6、对所述静止两相反电动势进行坐标变换,得到旋转两相坐标系轴下的旋转两相反电动势;
7、采用所述旋转两相反电动势和所述机组运行数据,确定所述目标机组的目标位置数据和目标转速数据。
8、可选地,所述采用所述旋转两相反电动势和所述机组运行数据,确定所述目标机组的目标位置数据和目标转速数据的步骤,包括:
9、采用所述旋转两相反电动势,确定目标误差数据;
10、采用所述目标误差数据和所述机组运行数据,确定所述目标机组的目标位置数据和目标转速数据。
11、可选地,所述旋转两相反电动势包括第一旋转两相反电动势和第二旋转两相反电动势,所述采用所述旋转两相反电动势,确定目标误差数据的步骤,包括:
12、采用所述第一旋转两相反电动势的平方值和所述第二旋转两相反电动势的平方值进行和值运算,得到第一和值;
13、采用所述第一和值进行开方运算,得到第一开方值;
14、采用所述第二旋转两相反电动势与所述第一开方值进行比值运算,得到目标误差数据。
15、可选地,所述机组运行数据包括第一观测器参数、第二观测器参数和第三观测器参数,所述采用所述目标误差数据和所述机组运行数据,确定所述目标机组的目标位置数据和目标转速数据的步骤,包括:
16、对所述目标误差数据进行一重积分运算,得到第一积分值;
17、采用所述第一积分值、所述目标误差数据、所述第二观测器参数和所述第三观测器参数,确定目标转速数据;
18、采用所述第一积分值、所述目标转速数据和所述第一观测器参数,确定目标位置数据。
19、可选地,所述采用所述第一积分值、所述目标误差数据、所述第二观测器参数和所述第三观测器参数,确定目标转速数据的步骤,包括:
20、对所述目标误差数据进行二重积分运算,得到第二积分值;
21、采用所述第一积分值与所述第二观测器参数进行乘值运算,得到第一乘值;
22、采用所述第二积分值与所述第三观测器参数进行乘值运算,得到第二乘值;
23、采用所述第一乘值和所述第二乘值进行和值运算,得到目标转速数据。
24、可选地,所述采用所述第一积分值、所述目标转速数据和所述第一观测器参数,确定目标位置数据的步骤,包括:
25、对所述目标转速数据进行一重积分运算,得到第三积分值;
26、采用所述第一积分值与所述第一观测器参数进行乘值运算,得到第三乘值;
27、采用所述第三积分值和所述第三乘值进行和值运算,得到目标位置数据。
28、可选地,采用克拉克变换法对所述三相电力数据进行坐标变换。
29、可选地,采用帕克变换法对所述静止两相反电动势进行坐标变换。
30、可选地,输入所述预置反电动势观测器的所述机组运行数据包括定子电阻、定子电感、观测器参数矩阵、转速反馈数据、两相估算电流和两相估算相反电动势。
31、本发明第二方面提供的一种三阶积分型的风力发电机组位置与转速估算系统,包括:
32、响应模块,用于响应对目标机组的位置与转速估算请求,获取所述目标机组的三相电力数据和机组运行数据;
33、第一坐标变换模块,用于对所述三相电力数据进行坐标变换,得到静止两相坐标系轴下的两相电力数据;
34、观测器求解模块,用于采用所述两相电力数据和所述机组运行数据输入预置反电动势观测器进行求解,得到静止两相坐标系轴下的静止两相反电动势;
35、第二坐标变换模块,用于对所述静止两相反电动势进行坐标变换,得到旋转两相坐标系轴下的旋转两相反电动势;
36、数据输出模块,用于采用所述旋转两相反电动势和所述机组运行数据,确定所述目标机组的目标位置数据和目标转速数据。
37、从以上技术方案可以看出,本发明具有以下优点:
38、在本发明中,响应对目标机组的位置与转速估算请求,获取目标机组的三相电力数据和机组运行数据,对三相电力数据进行坐标变换,得到静止两相坐标系轴下的两相电力数据,采用两相电力数据和机组运行数据输入预置反电动势观测器进行求解,得到静止两相坐标系轴下的静止两相反电动势,对静止两相反电动势进行坐标变换,得到旋转两相坐标系轴下的旋转两相反电动势,采用旋转两相反电动势和机组运行数据,确定目标机组的目标位置数据和目标转速数据;通过两次坐标变换以及预置反电动势观测器,将三相电力数据转换成旋转坐标下的旋转两相反电动势,然后计算风力发电机组的误差数据,并将误差数据结合机组运行数据作为预置的三阶积分型位置和转速估计器的输入,得到更加精确的目标转速数据和目标位置数据;解决了如何准确地估算风力发电机组位置与转速的技术问题。
技术特征:
1.一种三阶积分型的风力发电机组位置与转速估算方法,其特征在于,包括:
2.根据权利要求1所述的三阶积分型的风力发电机组位置与转速估算方法,其特征在于,所述采用所述旋转两相反电动势和所述机组运行数据,确定所述目标机组的目标位置数据和目标转速数据的步骤,包括:
3.根据权利要求2所述的三阶积分型的风力发电机组位置与转速估算方法,其特征在于,所述旋转两相反电动势包括第一旋转两相反电动势和第二旋转两相反电动势,所述采用所述旋转两相反电动势,确定目标误差数据的步骤,包括:
4.根据权利要求2所述的三阶积分型的风力发电机组位置与转速估算方法,其特征在于,所述机组运行数据包括第一观测器参数、第二观测器参数和第三观测器参数,所述采用所述目标误差数据和所述机组运行数据,确定所述目标机组的目标位置数据和目标转速数据的步骤,包括:
5.根据权利要求4所述的三阶积分型的风力发电机组位置与转速估算方法,其特征在于,所述采用所述第一积分值、所述目标误差数据、所述第二观测器参数和所述第三观测器参数,确定目标转速数据的步骤,包括:
6.根据权利要求4所述的三阶积分型的风力发电机组位置与转速估算方法,其特征在于,所述采用所述第一积分值、所述目标转速数据和所述第一观测器参数,确定目标位置数据的步骤,包括:
7.根据权利要求1所述的三阶积分型的风力发电机组位置与转速估算方法,其特征在于,采用克拉克变换法对所述三相电力数据进行坐标变换。
8.根据权利要求1所述的三阶积分型的风力发电机组位置与转速估算方法,其特征在于,采用帕克变换法对所述静止两相反电动势进行坐标变换。
9.根据权利要求1所述的三阶积分型的风力发电机组位置与转速估算方法,其特征在于,输入所述预置反电动势观测器的所述机组运行数据包括定子电阻、定子电感、观测器参数矩阵、转速反馈数据、两相估算电流和两相估算相反电动势。
10.一种三阶积分型的风力发电机组位置与转速估算系统,其特征在于,包括:
技术总结
本发明涉及风力发电机组控制技术领域,公开了三阶积分型的风力发电机组位置与转速估算方法和系统,通过两次坐标变换以及预置反电动势观测器,将三相电力数据转换成旋转坐标下的旋转两相反电动势,然后计算风力发电机组的误差数据,并将误差数据结合机组运行数据作为预置的三阶积分型位置和转速估计器的输入,得到更加精确的目标转速数据和目标位置数据;解决了如何准确地估算风力发电机组位置与转速的技术问题。
技术研发人员:黄智达,吕帅帅,张巍,李婧靓
受保护的技术使用者:南方电网科学研究院有限责任公司
技术研发日:
技术公布日:2025/2/13
- 还没有人留言评论。精彩留言会获得点赞!