一种集成惯性传感器和磁传感器的封装结构及其封装方法与流程
【】本发明涉及集成式传感器,尤其涉及一种集成惯性传感器和磁传感器的封装结构及其封装方法。
背景技术
0、
背景技术:
1、近些年来,微电子集成技术的研究和开发在cmos(complementary metal oxidesemiconductor,即互补金属氧化物半导体)和mems(micro-electro-mechanical system,即微机电系统)领域取得了惊人的进展。cmos技术已经成为集成电路(ic)的主要制造技术。然而,mems仍然依赖于传统工艺技术。用通俗的话来说,cmos电路就是“大脑”,提供决策能力,而mems是“眼睛”和“手臂”,提供感知和控制环境的能力。近些年来,消费类电子发展迅猛,伴随着智能手机的热销,传感器的应用领域越来越广泛。通常情况下,不同功能的传感器往往独立运用来实现其功能。随着消费类电子逐渐向轻,薄,小的方向发展,且对灵敏度的要求也越来越高,常规三轴传感器无法满足要求。因此,有必要提出集成度更高的多轴传感器满足市场需求。且不同传感器集成的同时,又对封装的尺寸和加工的成本提出了更高的要求。
技术实现思路
0、
技术实现要素:
1、本发明的目的之一在于提供一种集成惯性传感器和磁传感器的封装结构及其封装方法,其通过wlp(wafer level package,即晶圆级封装)扇出型的封装方式,将惯性传感器和磁传感器集成到一个封装体内部,一方面可以缩短产品的加工周期,降低了加工成本;另一方面,产品的集成度更高,减小了封装体积,应用前景更广泛。
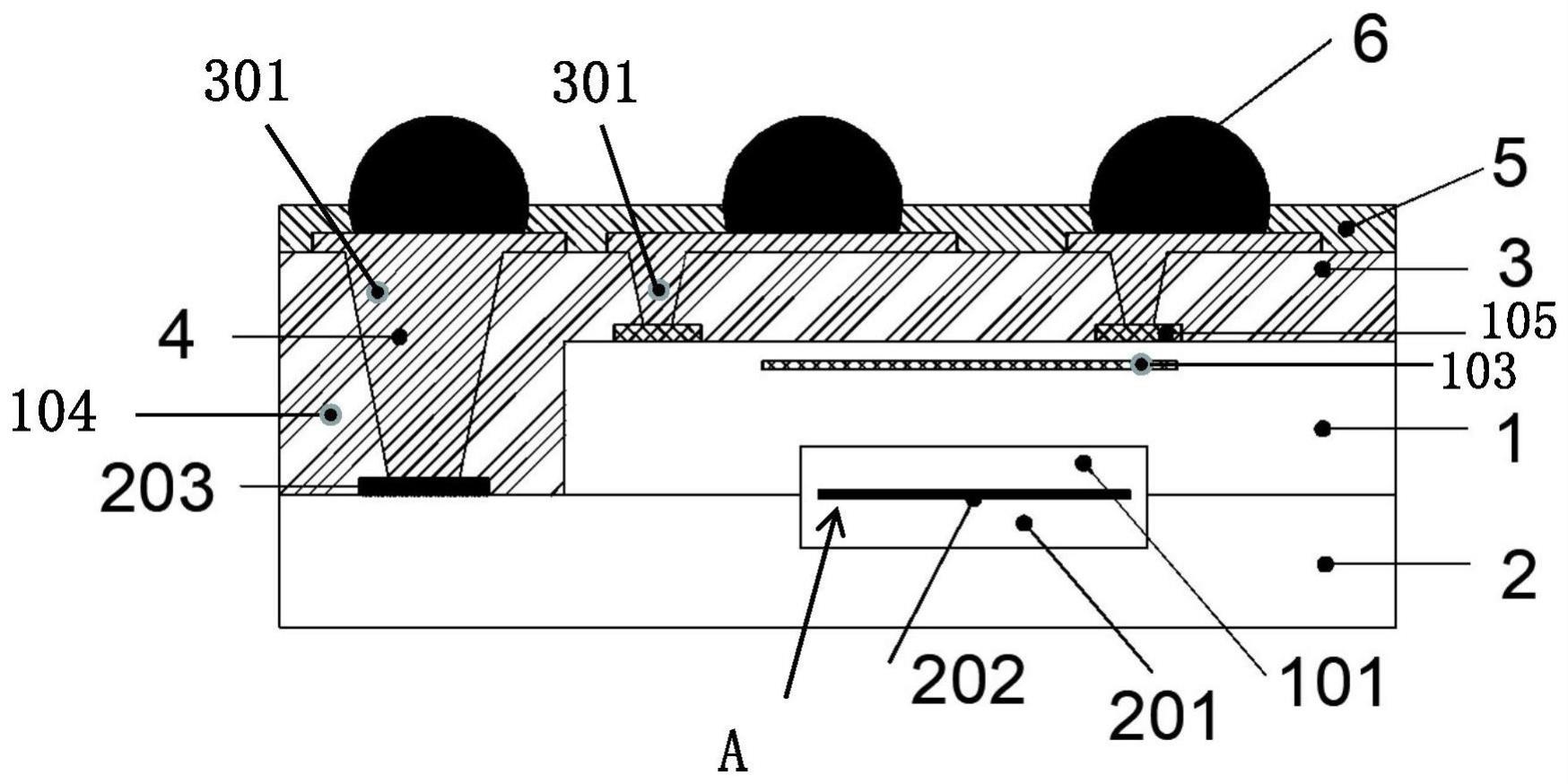
2、根据本发明的一个方面,本发明提供一种集成惯性传感器和磁传感器的封装结构,其包括:第一半导体圆片,其正面设置有磁传感器,其背面设置有第一空腔和贯穿所述第一半导体圆片的导电窗口;第二半导体圆片,其正面与所述第一半导体圆片的背面相对且相互键合,所述第二半导体圆片的正面与所述第一空腔的相对位置处设置有第三空腔和惯性传感器;所述第二半导体圆片的正面与所述导电窗口的相对位置处设置有金属焊盘。
3、进一步的,所述集成惯性传感器和磁传感器的封装结构还包括:塑封料层,其填充并覆盖所述导电窗口,以及覆盖所述第一半导体圆片的正面;金属导线,其由所述金属焊盘和所述磁传感器引出并再分布到所述塑封料层远离所述第一半导体圆片的一侧表面。
4、进一步的,所述塑封料层在与所述金属焊盘和所述磁传感器的相对位置处分别设置有贯穿所述塑封料层的通孔,以露出所述金属焊盘和所述磁传感器;所述金属导线经所述通孔引出所述金属焊盘和所述磁传感器并再分布到所述塑封料层远离所述第一半导体圆片的一侧表面。
5、进一步的,所述第一空腔和第三空腔构成腔体a;所述惯性传感器位于所述腔体a内;所述金属焊盘与所述惯性传感器电连接;所述磁传感器与所述腔体a相对,且所述磁传感器位于所述导电窗口或金属焊盘的一侧。
6、进一步的,所述磁传感器包括磁传感器的控制单元及驱动电路;所述惯性传感器包括惯性传感器的控制单元及驱动电路。
7、进一步的,所述集成惯性传感器和磁传感器的封装结构还包括:焊球,其设置于所述塑封料层远离所述第一半导体圆片的一侧表面。
8、进一步的,所述惯性传感器为加速度传感器或陀螺仪;和/或所述腔体a为真空或包含一定大气压的气体。
9、根据本发明的另一个方面,本发明提供一种集成惯性传感器和磁传感器的封装结构的封装方法,其包括:提供第一半导体圆片,所述第一半导体圆片的背面设置有第一空腔和第二空腔;提供第二半导体圆片,所述第二半导体圆片的正面设置有第三空腔、惯性传感器和金属焊盘;将所述第一半导体圆片的背面与所述第二半导体圆片的正面相键合,键合后,所述第一半导体圆片背面的第二空腔与所述第二半导体圆片正面的金属焊盘相对,所述第一半导体圆片背面的第一空腔与所述第二半导体圆片正面的第三空腔和惯性传感器相对;在键合后的所述第一半导体圆片正面形成磁传感器;刻蚀掉所述第一半导体圆片的第二空腔的底部,以形成贯穿所述第一半导体圆片的导电窗口,所述金属焊盘从所述导电窗口露出;从所述第一半导体圆片的正面,用塑封料对键合在一起的所述第一半导体圆片和第二半导体圆片进行圆片级的包封,以形成塑封料层,所述塑封料层填充并覆盖所述导电窗口,以及覆盖形成有所述磁传感器的所述第一半导体圆片的正面。
10、进一步的,所述集成惯性传感器和磁传感器的封装结构的封装方法还包括:在所述塑封料层远离所述第一半导体圆片的一侧表面形成金属导线,所述金属导线由所述金属焊盘和所述磁传感器引出并再分布到所述塑封料层远离所述第一半导体圆片的一侧表面。
11、进一步的,在所述塑封料层远离所述第一半导体圆片的一侧表面形成金属导线的步骤包括:在所述塑封料层与所述金属焊盘和磁传感器的相对位置处分别形成贯穿所述塑封料层的通孔,以露出所述金属焊盘和磁传感器;经所述通孔将所述金属焊盘和磁传感器引出至所述塑封料层远离所述第一半导体圆片的一侧表面,并将引出的所述金属导线在所述塑封料层远离所述第一半导体圆片的一侧表面再分布。
12、进一步的,所述集成惯性传感器和磁传感器的封装结构的封装方法,还包括:在分布有所述金属导线的所述塑封料层远离所述第一半导体圆片的一侧表面设置焊球,以使键合后的所述第一半导体圆片和第二半导体圆片形成晶圆级封装体。
13、进一步的,所述集成惯性传感器和磁传感器的封装结构的封装方法还包括:切割所述晶圆级封装体以得到单颗芯片结构。
14、进一步的,所述第一空腔和第三空腔构成腔体a,所述惯性传感器位于所述腔体a内;所述金属焊盘与所述惯性传感器电连接;所述磁传感器与所述腔体a相对,且所述磁传感器位于所述导电窗口或金属焊盘的一侧。
15、进一步的,所述磁传感器包括磁传感器的控制单元及驱动电路,所述惯性传感器包括惯性传感器的控制单元及驱动电路;所述第一空腔的深度小于所述第二空腔的深度;所述惯性传感器为加速度传感器或陀螺仪;和/或所述腔体a为真空或包含一定大气压的气体。与现有技术相比,本发明通过wlp(wafer level package,即晶圆级封装)扇出型的封装方式,将惯性传感器和磁传感器传感器集成到一个封装体内部,一方面可以缩短产品的加工周期,降低了加工成本;另一方面,产品的集成度更高,减小了封装体积,应用前景更广泛。
技术特征:
1.一种集成惯性传感器和磁传感器的封装结构,其特征在于,其包括:
2.根据权利要求1所述的集成惯性传感器和磁传感器的封装结构,其特征在于,其还包括:
3.根据权利要求2所述的集成惯性传感器和磁传感器的封装结构,其特征在于,
4.根据权利要求1所述的集成惯性传感器和磁传感器的封装结构,其特征在于,
5.根据权利要求1所述的集成惯性传感器和磁传感器的封装结构,其特征在于,
6.根据权利要求2所述的集成惯性传感器和磁传感器的封装结构,其特征在于,其还包括:
7.根据权利要求1-6任一所述的集成惯性传感器和磁传感器的封装结构,其特征在于,
8.一种集成惯性传感器和磁传感器的封装结构的封装方法,其特征在于,其包括:
9.根据权利要求8所述的集成惯性传感器和磁传感器的封装结构的封装方法,其特征在于,其还包括:
10.根据权利要求9所述的集成惯性传感器和磁传感器的封装结构的封装方法,其特征在于,
11.根据权利要求9所述的集成惯性传感器和磁传感器的封装结构的封装方法,其特征在于,其还包括:
12.根据权利要求11所述的集成惯性传感器和磁传感器的封装结构的封装方法,其特征在于,其还包括:
13.根据权利要求8-12任一所述的集成惯性传感器和磁传感器的封装结构的封装方法,其特征在于,
14.根据权利要求8-12任一所述的集成惯性传感器和磁传感器的封装结构的封装方法,其特征在于,所述磁传感器(103)包括磁传感器的控制单元及驱动电路,所述惯性传感器(202)包括惯性传感器的控制单元及驱动电路;
技术总结
本发明提供一种集成惯性传感器和磁传感器的封装结构及其封装方法,集成惯性传感器和磁传感器的封装结构包括:第一半导体圆片,其正面设置有磁传感器,其背面设置有第一空腔和贯穿第一半导体圆片的导电窗口;第二半导体圆片,其正面与第一半导体圆片的背面相对且相互键合,第二半导体圆片的正面与第一空腔的相对位置处设置有第三空腔和惯性传感器;第二半导体圆片的正面与导电窗口的相对位置处设置有金属焊盘。与现有技术相比,本发明通过WLP扇出型的封装方式,将惯性传感器和磁传感器传感器集成到一个封装体内部,一方面可以缩短产品的加工周期,降低了加工成本;另一方面,产品的集成度更高,减小了封装体积,应用前景更广泛。
技术研发人员:郭亚,刘尧青,刘海东,储莉玲
受保护的技术使用者:美新半导体(无锡)有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!