自动化带压作业装置及其作业方法与流程
本申请总体来说涉及石油装备,具体公开了一种自动化带压作业装置及其作业方法。
背景技术:
1、带压作业是在保持井内高井压的情况下,强制进行修完井作业的工艺技术。目前常规带压施工作业的大部分操作,全部是由人员站立在井口平台上来完成的。施工作业过程中,一旦发生井喷和危险气体泄露,将严重威胁到操作的生命安全。为了降低人工劳动强度,目前常规带压作业过程中,尝试使用机械装置代替人工,但是现有的自动化带压作业装置连续运行的可靠性较差。
技术实现思路
1、本申请的目的在于提供一种自动化带压作业装置及其作业方法,以解决现有技术中往复泵液力端连续运行可靠性较差的技术问题。
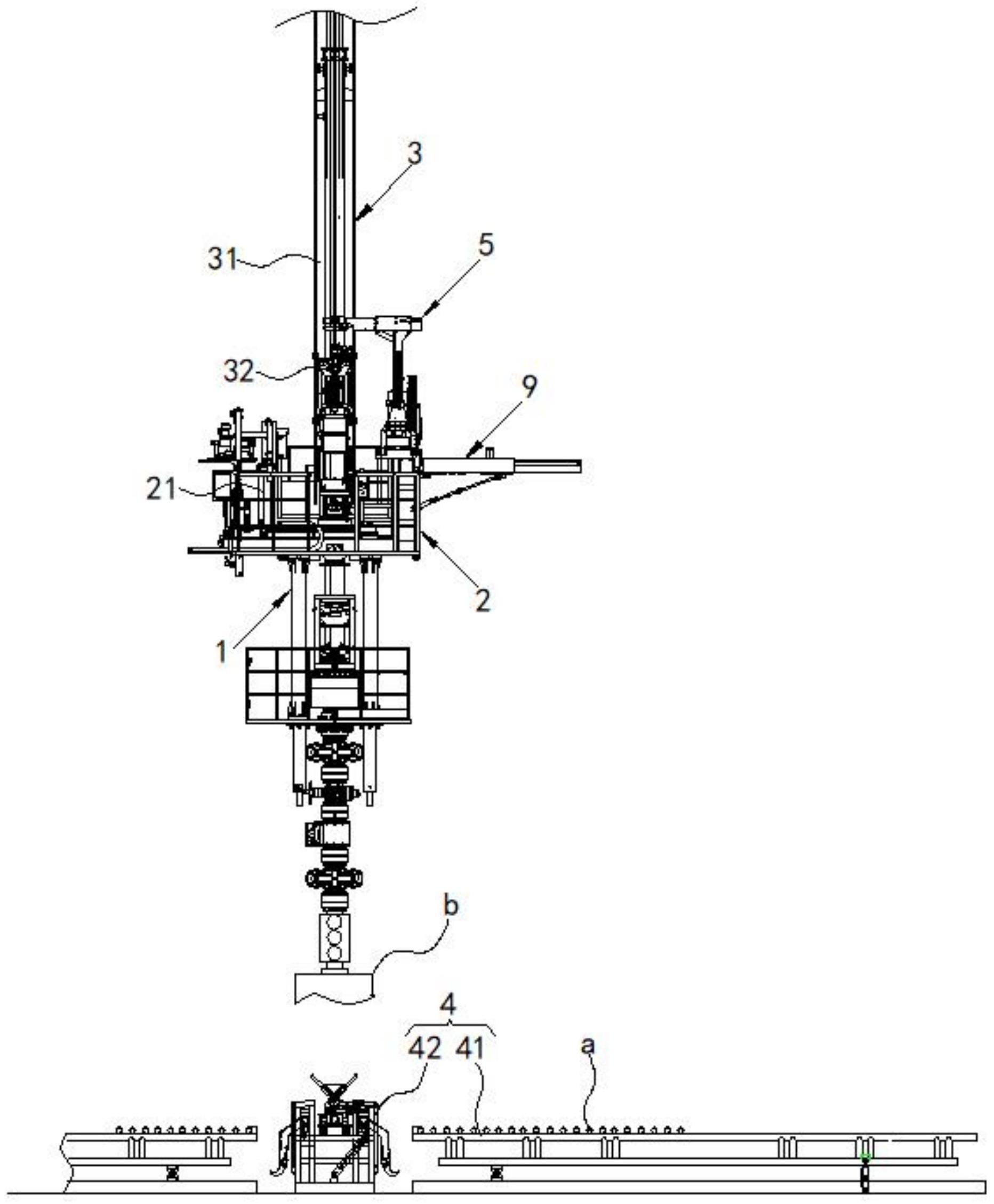
2、根据本申请的第一个方面,提供了一种自动化带压作业装置,包括:
3、带压作业机,固定于井口上;
4、支撑平台,设置于所述带压作业机上,所述支撑平台上滑动设置有横移滑车;
5、提管机构,包括桅杆和提管滑车,所述桅杆设置于所述带压作业机上,所述提管滑车滑动设置于所述桅杆上,用于牵引油管的端部;
6、送管机构,设置于所述带压作业机的一侧,用于向所述提管滑车输送所述油管或者接收所述提管滑车输出的油管;
7、第一扶正机构,设置于所述支撑平台上,用于扶正所述提管机构和所述送管机构之间的所述油管;
8、第二扶正机构,设置于所述横移滑车上,所述第二扶正机构包括扶正筒,所述扶正筒的上部设置有喇叭导向口;以及
9、液压钳,设置于所述横移滑车上,用于旋转所述油管,以完成两个所述油管接箍的上扣或者卸扣。
10、根据本申请的一实施方式,所述送管机构包括动力管桥和设置于所述动力管桥一端的猫道机,所述动力管桥用于承载所述油管,所述猫道机用于举升所述油管,以使所述油管在所述动力管桥和所述提管滑车之间输送。
11、根据本申请的一实施方式,所述猫道机包括:
12、底座,所述底座上设置有滑槽;
13、承载平台,所述承载平台的一端滑动设置于所述滑槽内;
14、起升组件,用于起升所述承载平台,以使所述承载平台与所述底座呈一定夹角;
15、翻转组件,包括翻转槽和翻转油缸,所述翻转槽与所述承载平台的顶部铰接,所述翻转油缸的输出端与所述翻转槽连接,以使所述翻转槽可朝向所述承载平台的两侧翻转;
16、推送组件,设置于所述翻转槽上,且所述推送组件包括可沿所述翻转槽的长度方向滑动的推送坡道及带动所述推送坡道滑动的推送油缸;
17、抓手组件,设置于所述底座的一侧,用于抓取所述动力管桥上的油管至所述推送坡道;以及
18、导向臂,设置于所述底座的一侧,用于导送所述推送坡道上的油管至所述动力管桥。
19、根据本申请的一实施方式,所述第一扶正机构包括:
20、基座;
21、翻转机械臂,可转动设置于所述基座上;
22、伸缩机械臂,设置于所述翻转机械臂的远离所述基座一端;以及
23、扶正导轮,设置于所述伸缩机械臂的输出端,用于扶正所述油管。
24、根据本申请的一实施方式,所述带压作业机包括:
25、连接框架;
26、举升油缸,设置于所述连接框架上;
27、连接板,设置于所述举升油缸的顶部输出端;
28、游动卡瓦组,设置于所述连接板上;
29、固定卡瓦组,设置于所述连接框架上,且位于所述游动卡瓦组的正下方;以及
30、上接箍检测装置,设置于所述游动卡瓦组上,用于检测所述油管的接箍。
31、根据本申请的一实施方式,所述带压作业机还包括设置于所述连接框架底部的上闸板防喷器及位于所述上闸板防喷器下方的下闸板防喷器,所述上闸板防喷器和所述下闸板防喷器之间设置有放喷阀、平衡阀和下接箍检测装置。
32、根据本申请的一实施方式,所述自动化带压作业装置还包括设置于所述支撑平台上的溢流抢喷机构,所述溢流抢喷机构包括伸缩组件、下压组件、旋转组件和关闭阀门,所述下压组件设置于伸缩组件的输出端,所述旋转组件设置于所述下压组件的底部输出端,所述关闭阀门设置于所述旋转组件的动力输出端,用于封堵所述油管的接箍。
33、根据本申请实施例的第二个方面,提供了一种自动化带压作业方法,应用于上述的自动化带压作业装置,所述自动化带压作业方法包括下入油管作业,所述下入油管作业包括:通过送管机构将油管输送给提管滑车;所述提管滑车牵引所述油管的顶部向上移动,通过第一扶正机构对所述油管的底部进行支撑,以使所述油管脱离所述送管机构;通过所述第一扶正机构对油管进行初步扶正,以使油管的底部可以插入第二扶正机构的喇叭导向口;通过所述第二扶正机构对油管进行精准扶正,完成两油管的对扣;通过液压钳完成两个油管接箍的上扣;通过带压作业机将油管下入井筒。
34、在一个具体的实施例中,所述带压作业机包括:连接框架、举升油缸、连接板、游动卡瓦组、固定卡瓦组以及上接箍检测装置,所述自动化带压作业方法还包括:通过所述举升油缸带动所述连接板向上移动,直至所述上接箍检测装置检测到所述油管的所述接箍的上端面,获取所述举升油缸的活塞杆的第一伸出高度;所述举升油缸带动所述上接箍检测装置向下移动预设距离,并关闭所述游动卡瓦组,其中,所述预设距离为接箍高度定位点至接箍信号识别点之间的距离;所述举升油缸带动所述油管下行,并停止在所述活塞杆的第二伸出高度处,其中,所述第二伸出高度为所述液压钳上卸扣时举升所述油缸的基准停止高度,此时所述油管的端部刚好位于所述液压钳处。
35、在一个具体的实施例中,所述自动化带压作业方法还包括起出油管作业,所述起出油管作业包括:通过所述带压作业机将所述油管自所述井筒中起出;通过所述提管滑车的抓手抱住所述油管并沿所述油管上行,停留在所述油管的接箍下方,所述第一扶正机构扶住所述油管的下端,通过所述液压钳对两个所述油管的接箍进行卸扣;通过所述第一扶正机构推动所述油管的底部,同时所述提管滑车带动所述油管下行,直至所述油管的下端输送给所述送管机构;所述第一扶正机构复位,所述提管滑车继续下行,直至所述油管完全输送到所述送管机构上。
36、由上述技术方案可知,本申请的一种自动化带压作业装置及其作业方法的优点和积极效果在于:通过送管机构将油管竖起并输送给提管滑车,由提管滑车牵引油管的端部上行,在油管的底部即将脱离送管机构时,通过第一扶正机构对油管的底部进行扶正,避免油管摆动与桅杆发生磕碰,并且可以对油管进行初步扶正,因为桅杆难以保证竖直性,所以通过第一扶正机构对油管的底部进行扶正,以便提管滑车下放油管时使得油管的底部精准插入喇叭导向口,然后进入扶正筒与下方的油管接箍完成对扣,可以实现油管的精准扶正对扣,通过液压钳完成油管接箍的上扣,通过带压作业机将上扣后的油管下入井筒内,提高连续运行可靠性。
技术特征:
1.一种自动化带压作业装置,其特征在于,包括:
2.如权利要求1所述的自动化带压作业装置,其特征在于,所述送管机构(4)包括动力管桥(41)和设置于所述动力管桥(41)一端的猫道机(42),所述动力管桥(41)用于承载所述油管,所述猫道机(42)用于举升所述油管,以使所述油管在所述动力管桥(41)和所述提管滑车(32)之间输送。
3.如权利要求2所述的自动化带压作业装置,其特征在于,所述猫道机(42)包括:
4.如权利要求1所述的自动化带压作业装置,其特征在于,所述第一扶正机构(5)包括:
5.如权利要求1所述的自动化带压作业装置,其特征在于,所述带压作业机(1)包括:
6.如权利要求5所述的自动化带压作业装置,其特征在于,所述带压作业机(1)还包括设置于所述连接框架(11)底部的上闸板防喷器(171)及位于所述上闸板防喷器(171)下方的下闸板防喷器(172),所述上闸板防喷器(171)和所述下闸板防喷器(172)之间设置有放喷阀(181)、平衡阀(182)和下接箍检测装置(19)。
7.如权利要求6所述的自动化带压作业装置,其特征在于,所述自动化带压作业装置还包括设置于所述支撑平台(2)上的溢流抢喷机构(9),所述溢流抢喷机构(9)包括伸缩组件(91)、下压组件(92)、旋转组件(93)和关闭阀门(94),所述下压组件(92)设置于伸缩组件(91)的输出端,所述旋转组件(93)设置于所述下压组件(92)的底部输出端,所述关闭阀门(94)设置于所述旋转组件(93)的动力输出端,用于封堵所述油管的接箍。
8.一种自动化带压作业方法,应用于如权利要求1-7任一项所述的自动化带压作业装置,其特征在于,所述自动化带压作业方法包括下入油管作业,所述下入油管作业包括:
9.如权利要求8所述的自动化带压作业方法,其特征在于,所述带压作业机(1)包括:连接框架(11)、举升油缸(12)、连接板(13)、游动卡瓦组(14)、固定卡瓦组(15)以及上接箍检测装置(16),所述自动化带压作业方法还包括:
10.如权利要求8所述的自动化带压作业方法,其特征在于,所述自动化带压作业方法还包括起出油管作业,所述起出油管作业包括:
技术总结
本申请总体来说涉及石油装备技术领域,具体公开了一种自动化带压作业装置及其作业方法,该自动化带压作业装置包括带压作业机、支撑平台、提管机构、送管机构、第一扶正机构、第二扶正机构和液压钳,带压作业机固定于井口上;支撑平台设置于带压作业机上,支撑平台上滑动设置有横移滑车;提管机构包括桅杆和提管滑车;送管机构设置于带压作业机的一侧,用于向提管滑车输送油管或者接收提管滑车输出的油管;第一扶正机构设置于支撑平台上,用于扶正提管机构和送管机构之间的油管;第二扶正机构设置于横移滑车上,第二扶正机构包括扶正筒,扶正筒的上部设置有喇叭导向口;该自动化带压作业装置提高自动化带压作业连续运行的可靠性。
技术研发人员:王鑫,王丰良,高峰,王建伟,林豪杰,杜君龙,李根,刘悦蕾,赵志成,赵全,任文明,迟世伟
受保护的技术使用者:中国石油天然气集团有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!