一种利用高精度陀螺边参与定向平差的隧道控制测量方法与流程
本发明涉及隧道控制测量,特别是涉及一种利用高精度陀螺边参与定向平差的隧道控制测量方法。
背景技术:
1、目前,长大隧道控制测量均采用导线测量的方式,其对边长要求高,对控制网网型要求严格,必须在严格符合现行规范的要求下,才可能测量出满足隧道贯通的测量控制网成果。同时,必须采用多次复测,多次复测是在现有技术的前提下,隧道可以顺利贯通的必要措施。
2、因此,现有技术背景和条件下,测量隧道内控制网成为了施工的一个重点,也是一个难点。同时,若想平行导坑开横洞展开更多工作面时,面临短边控制长边的测量巨大难题。
技术实现思路
1、在此背景下,选用高精度陀螺边参与定向平差的方法,可以完成末端约束,使导线测量过程误差得以减小,提高精度。
2、基于此,本发明的目的在于,提供一种利用高精度陀螺边参与定向平差的隧道控制测量方法,能够对隧道内导线点进行联合平差,根据平差结果指导隧道的继续开挖,提高隧道成型精度。
3、一种利用高精度陀螺边参与定向平差的隧道控制测量方法,隧道自起始端至接收端分n个区段依次进行开挖,第t个区段开挖完成后的测量步骤如下:
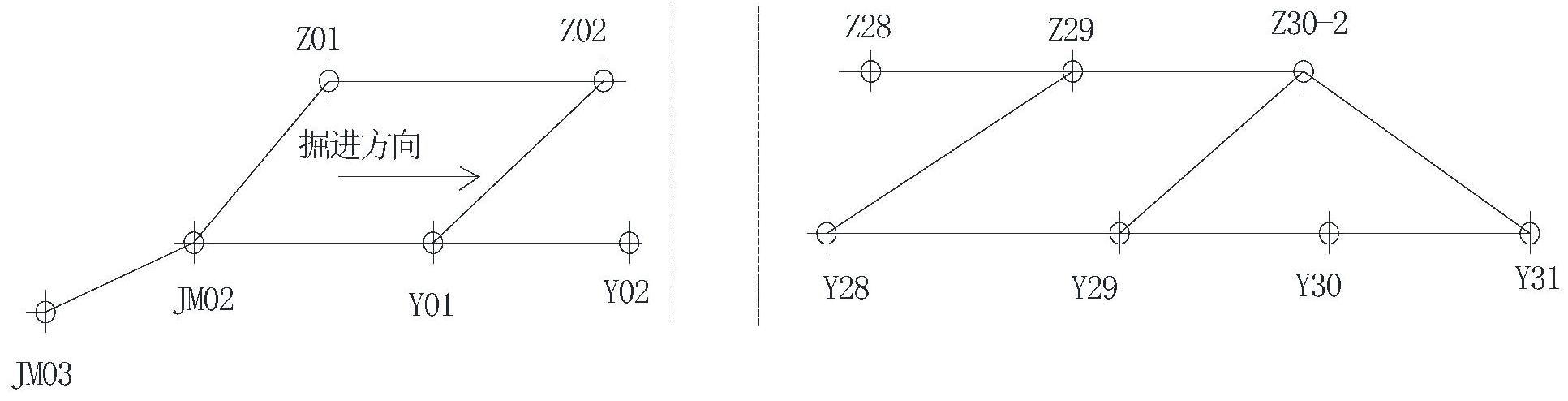
4、s1、在第t个区段的始端和末端之间布置多个导线点,多个导线点之间形成闭合导线;定义洞外导线约束边为陀螺基准边,定义在第t个区段的末端的一条导线边为洞内陀螺定向边;采集并获取闭合导线上的各导线点和各导线边观测数据,进行导线网的独立平差;
5、s2、测量所述洞外陀螺基准边的陀螺方位角、所述洞内陀螺定向边的陀螺方位角;
6、s3、基于所述洞外陀螺基准边的陀螺方位角和坐标方位角,得到子午线收敛角;基于子午线收敛角与所述洞内陀螺定向边的陀螺方位角,得到带误差的所述洞内陀螺定向边的坐标方位角,评定所述洞内陀螺定向边的坐标方位角中误差;
7、s4、根据s1中的导线边的观测数据,以及s3中带误差的所述洞内陀螺定向边的坐标方位角,进行联合平差,得到第t个区段中各导线点的新坐标及各导线边的新坐标方位角;
8、s5、以第t个区段中各导线点的新坐标及各导线边的新坐标方位角为基础,指导第t+1区段的开挖和测量;
9、其中,n为大于1的整数,1≤t<n。
10、本发明的隧道控制测量方法,通过在区段末端设置高精度的陀螺定向边,并利用高精度的陀螺定向边参与定向平差,高精度的陀螺定向边提高了方向精度,为联合平差提供了先决条件;选用高精度陀螺边参与定向平差,可以完成末端约束,使导线测量过程误差得以减小,提高精度;现有技术中,若平行导坑开横洞展开更多工作面时,面临短边控制长边的测量巨大难题,本发明的方法并为以短边小洞展开隧道掘进工作面,提供了可行的控制测量办法。本实发明提供的一种利用高精度陀螺边参与定向平差的隧道控制测量方法,通过区段末端的所述洞内陀螺定向边的陀螺方位角,能够对隧道区段内导线点进行联合平差,根据平差结果得到该区段中各个导线点的坐标,从而可以根据导线点的坐标指导隧道下一区段的开挖,避免隧道的轴线偏移量超出预设范围,提高隧道的成型精度。其中,与传统方法相比,步骤s3中带误差的所述洞内陀螺定向边的坐标方位角不再仅仅作为一个检核的坐标方位角,而是给定精度定权后参与闭合导线的导线边平差,联合平差中,采用导线测量和陀螺测量的坐标方位角联合平差,使导线端头产生角度约束,极大的提高了长大隧道控制网精度。
11、相对于现有技术,本发明的方法结合原隧道导线测量,仅增加一项陀螺边,不过多增加测量负担和经济投入。同时,在技术应用成熟的情况下,可以探讨对复测周期的合理确定,即采用更低频次更高精度保障贯通,而非高频次低精度取平确保贯通。因前者技术更加可靠,费用更加节约,不产生延误工期更有保障。
12、进一步地,步骤s2中,使用3.6″精度的陀螺经纬仪进行测量所述洞外陀螺基准边的陀螺方位角、所述洞内陀螺定向边的陀螺方位角。
13、进一步地,陀螺经纬仪测量采用洞外→洞内→洞外的测量方式。采用往返测的测量方式,确保测量精度。
14、进一步地,步骤s1的观测数据,可以采用传统的隧道区段内或隧道区段外的导线测量的方式开展,没有更多的额外工作产生,不影响现场作业,不增加额外工作。
15、进一步地,步骤s4中,在获得第t个区段中各导线点的新坐标及各导线边的新坐标方位角后,与步骤s1中独立平差各导线点的坐标及各导线边的坐标方位角比对,分析偏差值;若偏差值在容许范围内,则可进行s5;否则,重新在第t个区段的始端和末端之间测量导线点,重新进行步骤s1-s4,直至偏差值在容许范围内。增加与常规导线控制网对比分析,可以尽早发现异常偏差,同时在此基础上开展复测确认。
16、进一步,所述偏差值的容许范围为两倍理论推算容许中误差。
17、进一步地,s5中,第t+1个区段开挖完成后,在第t+1个区段的始端和末端之间布置多个导线点,相邻的导线点之间形成导线并依次连接形成多边形的闭合导线;其中,利用第t个区段内测量的联合平差后的陀螺定向边,作为下一区段开挖的公共导线边;采集并获取第t+1个区段的多个导线点;其中,以公共导线边或者与公共导线边相邻第t个区段中的导线边作为第t+1个区段的导线约束边。
18、进一步地,所述闭合导线为单一闭合导线,或者为多个单一闭合导线依次连接的组合。即闭合导线可以为单一闭合成环的闭合导线,或者两个或两个以上的单一闭合导线依次连接形成的闭合导线,两个相邻的单一闭合导线之间具有公共导线边。一般6km以下隧道这种测法都能准确贯通。
19、为了更好地理解和实施,下面结合附图详细说明本发明。
技术特征:
1.一种利用高精度陀螺边参与定向平差的隧道控制测量方法,其特征在于:隧道自起始端至接收端分n个区段依次进行开挖,第t个区段开挖完成后的测量步骤如下:
2.根据权利要求1所述的利用高精度陀螺边参与定向平差的隧道控制测量方法,其特征在于:步骤s2中,使用3.6″精度的陀螺经纬仪进行测量所述洞外陀螺基准边的陀螺方位角、所述洞内陀螺定向边的陀螺方位角。
3.根据权利要求2所述的利用高精度陀螺边参与定向平差的隧道控制测量方法,其特征在于:陀螺经纬仪测量采用洞外→洞内→洞外的测量方式。
4.根据权利要求1所述的利用高精度陀螺边参与定向平差的隧道控制测量方法,其特征在于:步骤s4中,在获得第t个区段中各导线点的新坐标及各导线边的新坐标方位角后,与步骤s1中的观测数据中原各导线点的坐标及各导线边的坐标方位角比对,分析偏差值;若偏差值在容许范围内,则可进行s5;否则,重新在第t个区段的始端和末端之间测量导线点,重新进行步骤s1-s4,直至偏差值在容许范围内。
5.根据权利要求1所述的利用高精度陀螺边参与定向平差的隧道控制测量方法,其特征在于:s5中,第t+1个区段开挖完成后,在第t+1个区段的始端和末端之间布置多个导线点,多个导线点之间形成闭合导线;其中,利用第t个区段内测量的联合平差后的陀螺定向边,作为下一区段开挖的公共导线边;采集并获取第t+1个区段的多个导线点;其中,以公共导线边或者与公共导线边相邻第t个区段中的导线边作为第t+1个区段的导线约束边。
6.根据权利要求1所述的利用高精度陀螺边参与定向平差的隧道控制测量方法,其特征在于:所述闭合导线为单一闭合导线,或者为多个单一闭合导线依次连接的组合。
技术总结
本发明涉及一种利用高精度陀螺边参与定向平差的隧道控制测量方法。本发明所述的一种利用高精度陀螺边参与定向平差的隧道控制测量方法,通过在区段末端设置高精度的陀螺定向边,利用高精度的陀螺定向边参与定向平差,高精度的陀螺定向边提高了方向精度,为联合平差提供了先决条件;选用高精度陀螺边参与定向平差,可以完成末端约束,使导线测量过程误差得以减小,提高精度。本发明所述的利用高精度陀螺边参与定向平差的隧道控制测量方法,能够对隧道内导线点进行联合平差,根据平差结果指导隧道的继续开挖,提高隧道成型精度。
技术研发人员:杨晓,倪派,丁岳森,徐千,张慧,龙俊州,唐志清,岳琪迪
受保护的技术使用者:中铁五局集团华南工程有限责任公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!