基于同步推拼方式的盾构机推进油缸控制方法及系统与流程
本发明属于隧道施工,涉及一种基于同步推拼方式的盾构机推进油缸控制方法及系统。
背景技术:
1、盾构机是目前隧道掘进设备中最重要的工程机械之一,提高其工作效率和设备可靠性是非常重要的。同步推拼(也称同步掘拼,excavating and assembling segmentssynchronously)可以在盾构机掘进的同时进行管片拼装,可以大幅度提升盾构机的工作效率。
2、具体的,掘进的过程中,当掘进距离大于一个待拼装管片的宽度时,保持其他推进油缸处于正常顶推管片的状态,并且重新分配油缸压力,保证同步拼装前后推进状态的油缸合力方向、大小不变,然后缩回第一块待拼装管片所对应区域的推进油缸(该区油缸进入同步拼装状态),开始对应管片的拼装。此过程中通过其他油缸正常顶推管片保持主机同步掘进。第一块管片拼装完成后,第一块管片所对应的油缸恢复推进状态,撑靴压在完成拼装的第一块管片上。然后按顺序拼装该环的其他各块管片,管片安装过程中,对应的油缸缩回进入同步拼装状态,其他油缸继续推进。这期间保持同步掘进,在该环最后一块待安装管片(k块)对应的推进油缸行程达到最大值前完成k块的拼装,即可在满足条件时(推进油缸行程大于管片宽度)进入下一环管片的同步拼装。整个过程中,盾构机不停止掘进,掘进过程中同步完成了管片的拼装,大大提高了盾构施工的效率,显著的缩短了施工工期,降低了施工的成本,是未来盾构施工的发展方向。
3、但是目前推进油缸同步推拼时的控制问题始终难以解决,例如如何保证同步拼装前后合力不变,虽然现有技术中提出了一些控制方法,例如公开号为cn114135300a的中国发明专利申请公布文本公开了一种盾构机同步推拼系统推进力分配方法,保证了开始同步推拼后,同步拼装管片对应的推进油缸停止推进缩回前后的合力方向和大小的不变。但这只是理论上计算出的,保证盾构机当前状态下同步拼装油缸停止推进前后的合力不变。而实际同步掘拼过程中,盾构机还在继续掘进,地质条件还在持续发生变化,同时刀盘状态(例如结泥饼情况)、泥水仓和气垫仓的压力都在不断变化,这些都会影响到盾构机的合力大小及方向,盾构机的合力发生变化,偏离预定的合力方向,将导致掘进方向偏离隧道设计方向,因此现有技术对同步掘拼的研究仅停留在理论阶段,难以实际投入工程应用,推进油缸控制问题得不到解决将影响同步掘拼的实施。
技术实现思路
1、本发明的目的是提供一种基于同步推拼方式的盾构机推进油缸的控制方法,用以解决现有同步掘拼工法中推进油缸的控制方案不完善,无法保证盾构机姿态的问题;还提供了一种基于同步推拼方式的盾构机推进系统,能够完善同步掘拼中推进油缸的控制方案,解决现有同步掘拼方案存在盾构机掘进方向偏离设计方向的问题。
2、在本公开的一个方面,提供一种基于同步推拼方式的盾构机推进油缸的控制方法,包括如下步骤:
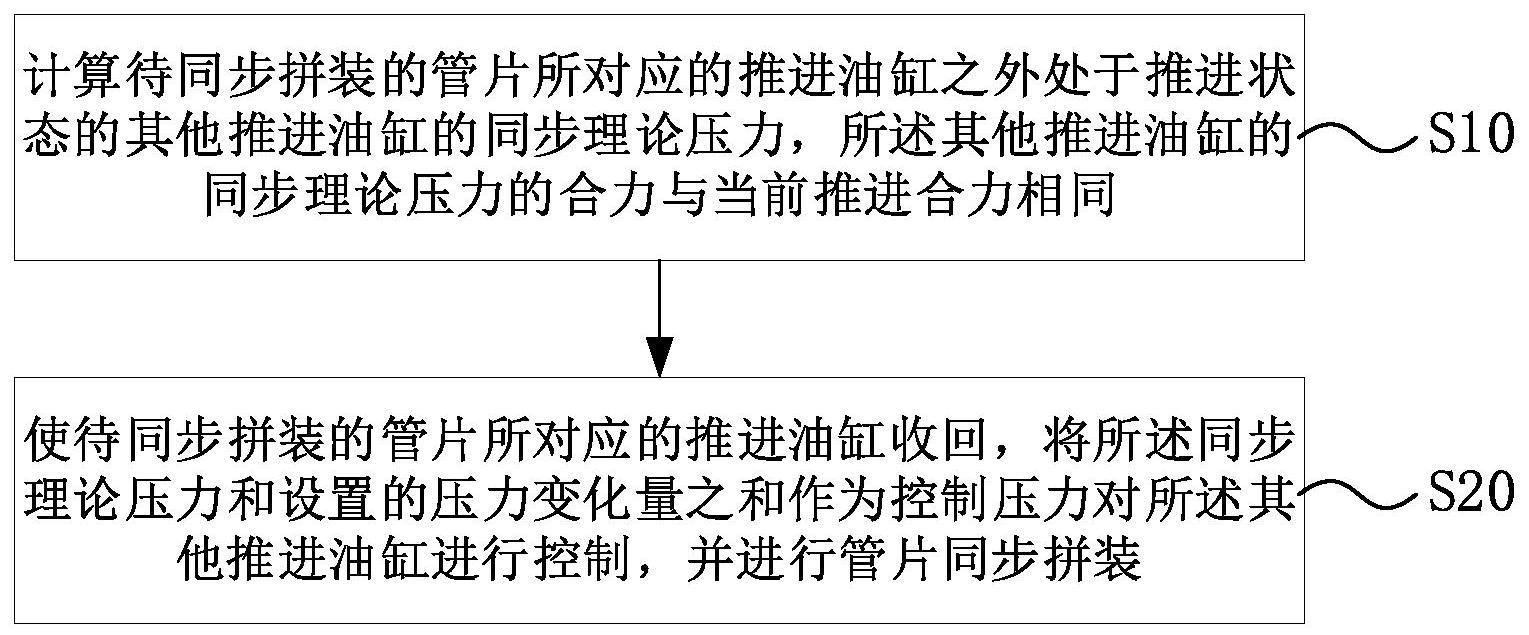
3、计算待同步拼装的管片所对应的推进油缸之外处于推进状态的其他推进油缸的同步理论压力,所述其他推进油缸的同步理论压力的合力与当前推进合力相同;
4、使待同步拼装的管片所对应的推进油缸缩回,将所述同步理论压力和设置的压力变化量之和作为控制压力对所述其他推进油缸进行控制,并进行管片同步拼装。
5、在一些实施例中,计算待同步拼装的管片所对应的推进油缸之外处于推进状态的其他推进油缸的同步理论压力的步骤包括:
6、在所述待同步拼装的管片所对应的推进油缸行程达到管片的轴向尺寸后,计算所述待同步拼装的管片所对应的推进油缸之外处于推进状态的其他推进油缸的同步理论压力。
7、在一些实施例中,所述控制方法还包括设置所述其他推进油缸的压力变化量的步骤,具体包括:
8、根据所述其他推进油缸的实时压力和同步理论压力的偏差压力,对所述其他推进油缸设置压力变化量以消除偏差。
9、在一些实施例中,所述控制方法还包括:
10、在同步推拼控制操作台的上位机界面上显示:处于推进状态的每根油缸的实时压力、同步理论压力和偏差压力。
11、在一些实施例中,所述控制方法还包括设置所述其他推进油缸的压力变化量的步骤,具体包括:
12、根据所述其他推进油缸的合力实时点位与掘进理论点位在坐标图上的点位偏差,对所述其他推进油缸设置压力变化量以消除偏差。
13、在一些实施例中,所述控制方法还包括:
14、在同步推拼控制操作台的上位机界面上显示:
15、推进油缸的合力实时点位和根据目标姿态确定的目标合力点位在相同坐标系下的坐标图。
16、在一些实施例中,对所述其他推进油缸设置压力变化量以消除偏差的步骤包括:
17、针对各个分区的推进油缸设置加压按键和减压按键,按下加压按键在原压力变化量的基础上增加设定压力值,按下减压按键在原压力变化量的基础上减少设定压力值;其中,所述分区中至少包括一组推进油缸。
18、在一些实施例中,将所述同步理论压力和设置的压力变化量之和作为控制压力对所述其他推进油缸进行控制的步骤包括:
19、根据预先获得的油缸压力与比例减压阀控制信号之间的对应关系,将所述同步理论压力对应的比例减压阀控制信号作为基础信号赋值给所述推进油缸对应的比例减压阀;
20、根据设定的压力变化量对应的比例减压阀控制信号作为增量信号赋值给所述推进油缸对应的比例减压阀。
21、在一些实施例中,所述压力变化量的初始值设为零。
22、在一些实施例中,管片同步拼装的步骤包括:
23、待同步拼装的管片所对应的推进油缸缩回达到其撑靴与上一环管片之间的拼装空间大于管片的轴向尺寸后,将待同步拼装的管片放入所述拼装空间;
24、控制待同步拼装的管片所对应的推进油缸伸出,并压紧对应拼装的管片;
25、控制待同步拼装的管片所对应的推进油缸随掘进速度伸长,与对应拼装的管片保持相对静止,同时完成对应管片的拼装。
26、在本公开的一个方面,提供一种基于同步推拼方式下的盾构机推进系统,包括若干推进油缸和控制各个推进油缸推进压力的推进控制器;所述推进控制器执行程序指令以实现上述的基于同步推拼方式的盾构机推进油缸的控制方法。
27、因此,根据本公开实施例,在同步推拼过程中,以当前状态下同步拼装动作前后的合力大小、方向不变为目标,计算出其他拼装状态推进油缸的推进力(油缸压力)的分配情况,以这个压力分配情况为初始值对处于推进状态的推进油缸进行控制,同时在掘进加同步拼装过程中,通过设置压力变化量来调整处于推进状态的推进油缸的控制压力,从而使盾构机姿态和掘进方向按照设计方向进行,保证同步掘拼过程中盾构机掘进方向不偏离设计方向,提高了同步掘拼的可行性。
技术特征:
1.一种基于同步推拼方式的盾构机推进油缸的控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的控制方法,其特征在于,计算待同步拼装的管片所对应的推进油缸之外处于推进状态的其他推进油缸的同步理论压力的步骤包括:
3.根据权利要求1所述的控制方法,其特征在于,还包括设置所述其他推进油缸的压力变化量的步骤,具体包括:
4.根据权利要求3所述的控制方法,其特征在于,还包括:
5.根据权利要求1所述的控制方法,其特征在于,还包括设置所述其他推进油缸的压力变化量的步骤,具体包括:
6.根据权利要求5所述的控制方法,其特征在于,还包括:
7.根据权利要求3-6任一所述的控制方法,其特征在于,对所述其他推进油缸设置压力变化量以消除偏差的步骤包括:
8.根据权利要求1所述的控制方法,其特征在于,将所述同步理论压力和设置的压力变化量之和作为控制压力对所述其他推进油缸进行控制的步骤包括:
9.根据权利要求1所述的控制方法,其特征在于,所述压力变化量的初始值设为零。
10.根据权利要求1所述的控制方法,其特征在于,管片同步拼装的步骤包括:
11.一种基于同步推拼方式的盾构机推进系统,其特征在于,包括若干推进油缸和控制各个推进油缸推进压力的推进控制器;所述推进控制器执行程序指令以实现权利要求1~10任一所述的基于同步推拼方式的盾构机推进油缸的控制方法。
技术总结
本公开涉及一种基于同步推拼方式的盾构机推进油缸控制方法及系统。控制方法包括如下步骤:计算待同步拼装的管片所对应的推进油缸之外处于推进状态的其他推进油缸的同步理论压力,所述其他推进油缸的同步理论压力的合力与当前推进合力相同;使待同步拼装的管片所对应的推进油缸缩回,将所述同步理论压力和设置的压力变化量之和作为控制压力对所述其他推进油缸进行控制,并进行管片同步拼装。
技术研发人员:叶蕾,郑永光,郝鹏华,冯书亮,周小磊,李孝谨,罗恒星,丁银亭,詹晨菲,巩启,郑博,郭攀登,朱雷
受保护的技术使用者:中铁工程装备集团有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!